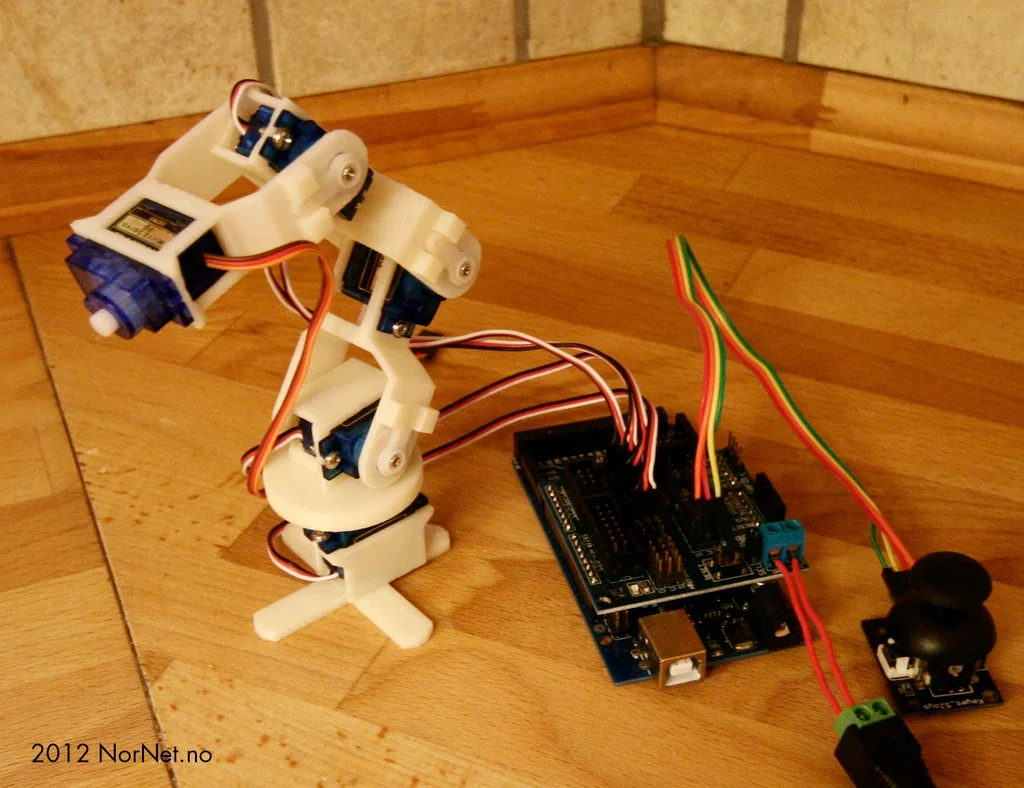
Cánh tay Robot siêu nhỏ (Micro Robot arm) dùng 9g Micro Servo

Mẫu Micro Robot arm nhỏ gọn, giá rẻ với 4 trục + gripper, dùng 5 servo 9g. Có thể điều khiển bằng remote, Arduino… File đã sửa lỗi tỉ lệ (phóng to 10x) và có link video, code GitHub kèm hướng dẫn lắp ráp.









Mô tả
CẢNH BÁO: mẫu này chưa hoàn hảo, nhiều chỗ không khớp chuẩn và sẽ phải “hy sinh”/chế lại một chút mới lắp đúng được.
Phần cũ bị nhỏ hơn tới 10 lần. Giờ mình đã sửa trong các file có đuôi (- mm). Mình cũng thêm một file gom tất cả chi tiết trên cùng một platform.
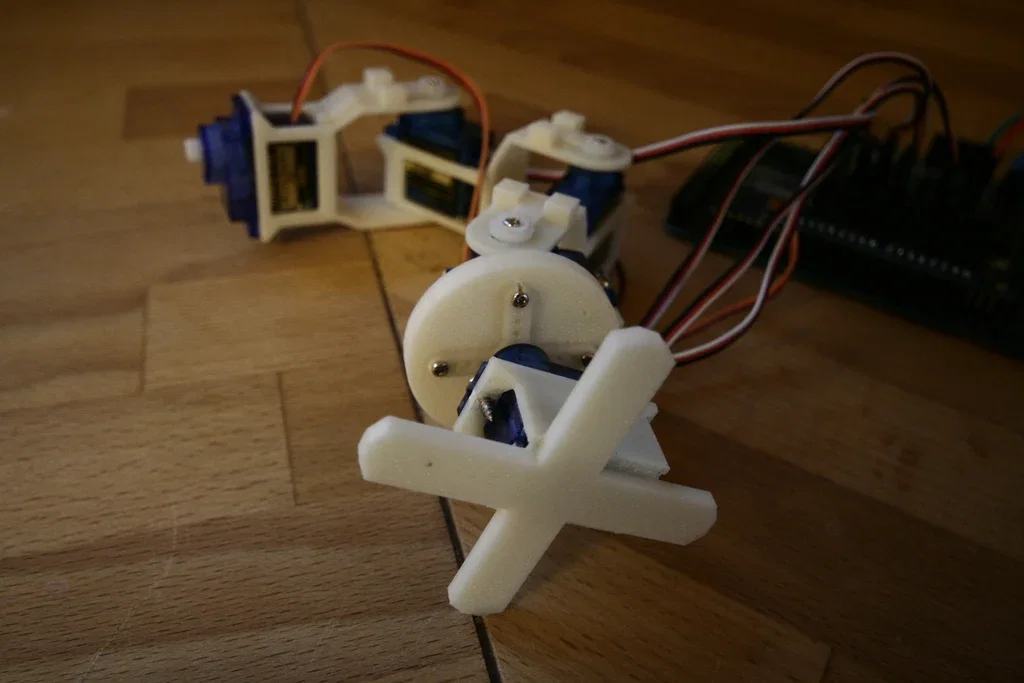
Một con robot rất nhỏ và rẻ. 4 trục + kẹp (gripper). Dùng 9g micro servo.
Robot có thể điều khiển bằng remote, Arduino, v.v.
Mình thấy trục (shaft) của servo có nhiều loại đường kính khác nhau. Nếu bánh răng (gear) không khớp mình sẽ làm cái mới. Bạn chỉ cần gửi mình đường kính trục.
Xem chạy thực tế:
http://www.youtube.com/watch?v=_fGNWsP41S0
http://www.youtube.com/watch?v=eWSpKL0VOp8
http://www.youtube.com/watch?v=Qj7jYwfpEMc
http://www.youtube.com/watch?v=Ca4PmYkpcgg
Lập trình (Programming):
http://www.youtube.com/watch?v=7hBvyaEWg5I
Code:
https://github.com/BenTommyE/Micro_robot_RC_servo_IR_remote
Instructions
Nếu bạn muốn thay servo nâng tay bằng loại mạnh hơn MG955 servo thì xem:
http://www.thingiverse.com/thing:38875
Cập nhật mới nhất (Latest uppdate)
- Arm w spring.stl và Sving v2.stl
Dùng để thêm dây thun và lò xo nhằm tăng khả năng chịu tải khi cầm/nâng. Chưa test. - Grippper v5 có “lò xo” mới để bám bánh răng tốt hơn.
- Gear v5 nhỏ hơn để kẹp chắc hơn và khớp với gripper v5
- ArmFront_v3 (thiết kế cho gripper)
- Gripper (x2)
- GripperGear - lắp trên gripperservo
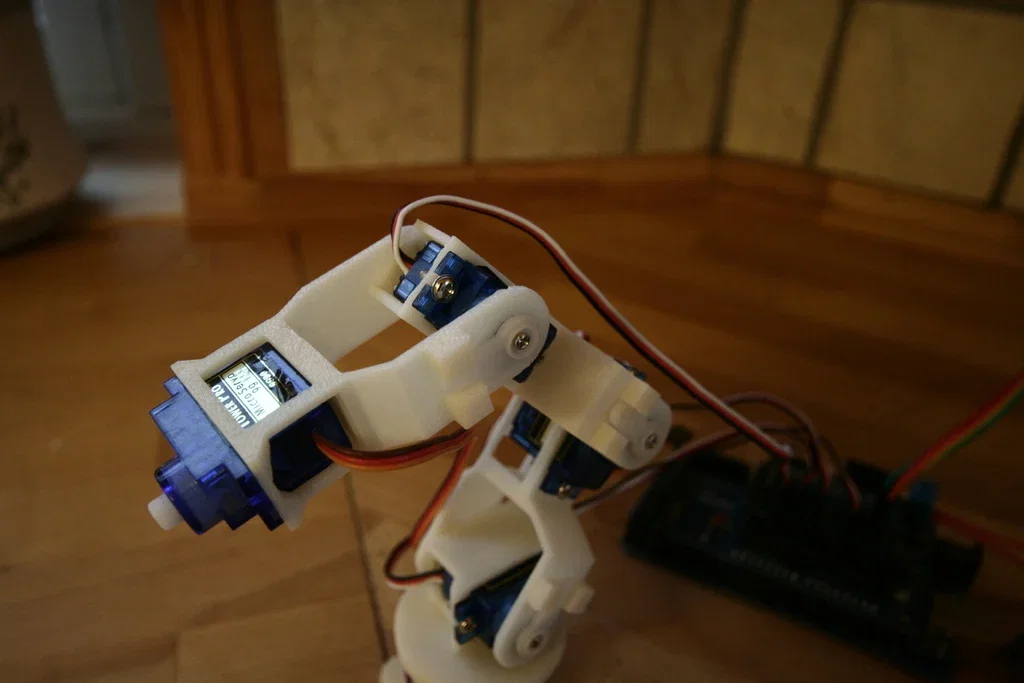
Bạn sẽ cần: - 5 micro servo 9g và phụ kiện đi kèm
- 4 con vít rất nhỏ (cho servo horn 4 tay)
- Máy in 3D (mình làm cho uPrint nhưng máy khác chắc vẫn được)
- Một số thứ để điều khiển robot - mình dùng Arduino và servoshield.
In 3D:
Phóng to 10 lần trước khi in. Và chọn đơn vị đo là metric (mm) chứ không phải inches. 1 - Fot
1 - Sving
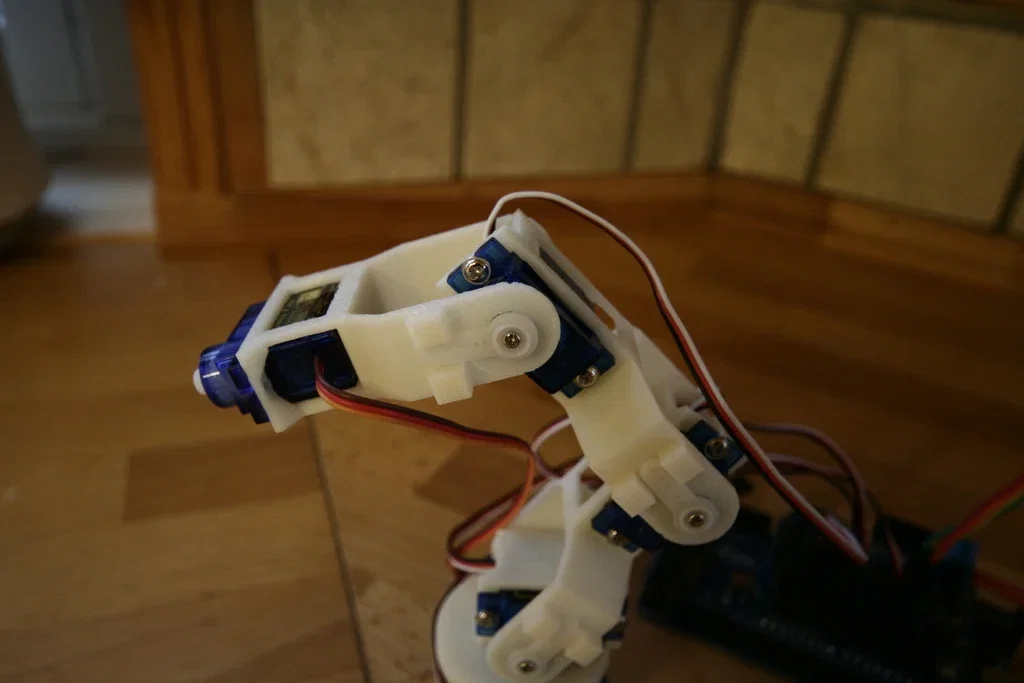
2 - Arm
1 - ArmFront
2 - Gripper
1 - GripperGear
Hướng dẫn (Instuctions)
Lắp servo vào các lỗ thiết kế sẵn.
Ghép hai cánh tay (arms) lại với nhau.
Canh servo về đúng vị trí giữa.
Gắn servo horn cùng với một cánh tay.
Servo ở phần đế (fot platform) nên dùng servo horn 4 tay để ổn định hơn.
Mình rất hoan nghênh các góp ý để cải tiến.
Chương trình robot cho Arduino:
http://bentommye.blogspot.no/2012/12/download-arduino-kontrollert-robot-arm.html
Giấy phép

File mô hình



















Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!