Hộp OctoPrint Raspberry Pi cho Prusa i3 (Einsy case MK3/MK3S)

Bản mod hộp Einsy của Prusa i3 MK3/MK3S để gắn Raspberry Pi 1B+/2B/3B/3B+/4B bên dưới bo Einsy, đi dây serial gọn trong hộp và vẫn truy cập được các cổng, phù hợp chạy OctoPrint kèm stream video.














Mô tả
Đây là bản chỉnh sửa của hộp Einsy (Einsy case) trên Original Prusa I3 MK3/MK3S, nhằm tích hợp chỗ lắp phù hợp cho Raspberry Pi 1B+/2B/3B/3B+/(4B - hiện đã có ở bản tải xuống đầu tiên). Phần này cho phép gắn một trong các Raspberry Pi kể trên nằm bên dưới bo điều khiển Einsy của máy in.
Có người sẽ hỏi: “Sao lại gắn Raspberry Pi cỡ đầy đủ vào Prusa I3 MK3S trong khi nó được thiết kế để chạy riêng với Raspberry Pi Zero W?” Câu trả lời đơn giản là Pi Zero W tuy đủ mạnh để chạy in, nhưng lại thiếu hiệu năng để vừa in vừa phát video độ phân giải cao cùng lúc. Nguyên nhân do Zero W chỉ có CPU 1GHz 1 nhân và 512MB RAM khá hạn chế. Thêm nữa, các nhà phát triển OctoPrint (phần mềm được khuyến nghị để điều khiển máy in 3D) cũng không khuyến khích dùng phần mềm của họ trên Raspberry Pi Zero (W) vì điểm yếu hiệu năng này, mà khuyên dùng Pi 3B trở lên. Với thông tin đó, nếu bạn muốn vừa điều khiển từ xa vừa xem tiến độ in của Prusa I3 MK3(S), thì Raspberry Pi 3B+/4B có thể là “mảnh ghép” quan trọng để đạt được mục tiêu.
Tính năng:
-
Hộp liền khối, mượt, “OEM quality”, theo đúng ngôn ngữ thiết kế của Prusa
-
Hộp chứa được cả Einsy RAMBo và Raspberry Pi 3 hoặc 4
-
Kết nối serial giữa Einsy và Raspberry Pi được đi gọn bên trong hộp nhờ dùng GPIO headers của Einsy (thông thường người ta dùng cáp USB A to B để nối hai board, nhưng cách này có thể xem như “dọn gọn” phần dây nhợ nhìn kém đẹp, khỏi phải dùng cáp to để đạt ngoại hình bên ngoài cho sạch sẽ)
-
Tất cả cổng trên Raspberry Pi vẫn truy cập được*
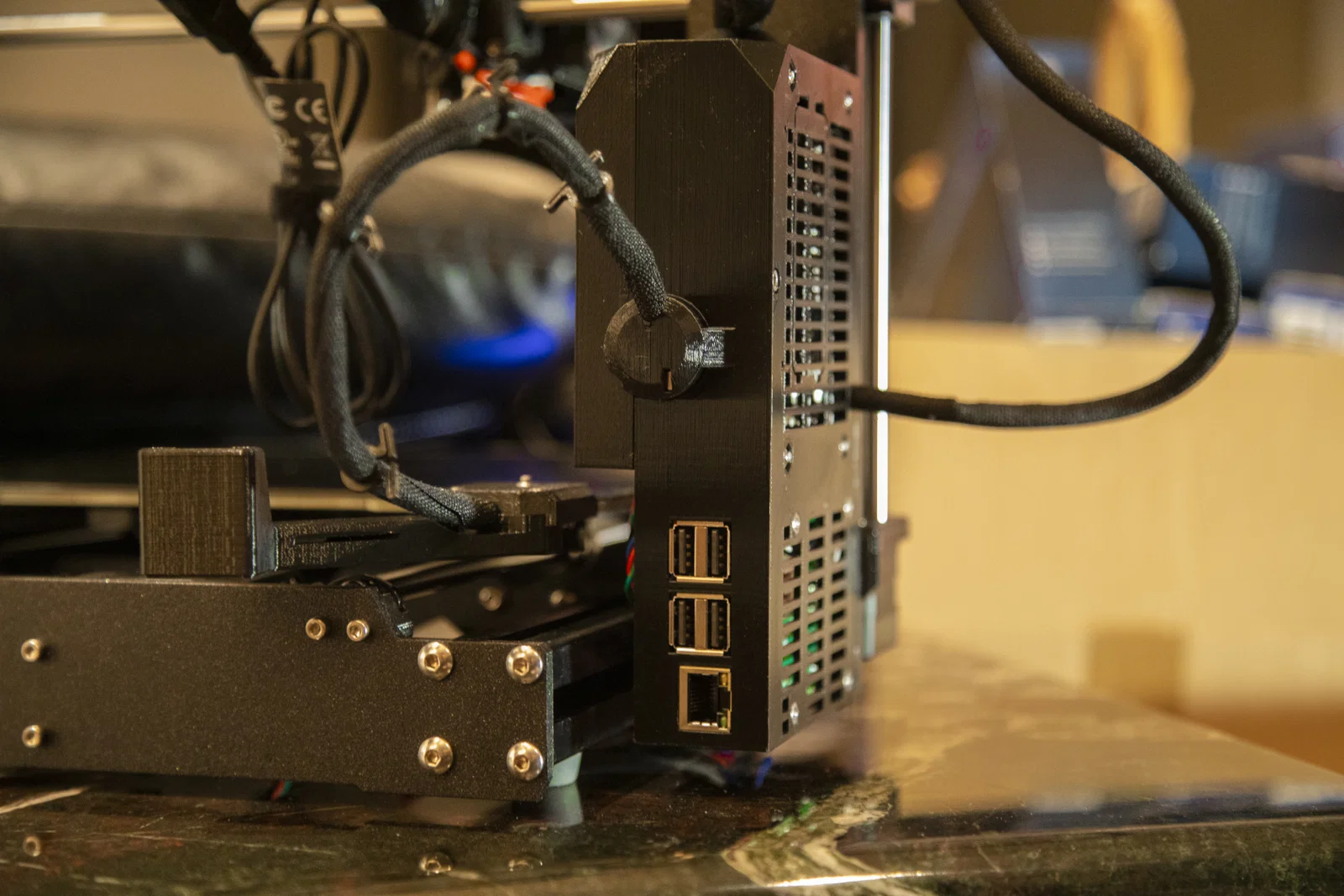
*Cổng Ethernet và 4 cổng USB A có thể cắm dễ dàng từ phía sau máy in; còn cổng cấp nguồn USB, cổng HDMI output(s), và jack 4-pole audio/composite video output chỉ truy cập được khi bạn nâng máy, nghiêng máy qua một bên, hoặc để máy lòi ra ngoài khi treo khỏi mép bàn.
Hướng dẫn in
Category: 3D Printer Parts Print Settings
Printer Brand: Prusa
Printer: I3 MK3S MMU2S
Rafts: No
Supports: No
Infill: 40%
Filament: Prusament PETG Black
Ghi chú:
Để có ngoại hình giống hệt chi tiết zin, mình khuyến nghị dùng đúng vật liệu Jet Black Prusament PETG (có thể mua tại The Prusa Shop)
Sau khi thử nghiệm, mình và nhiều người khác nhận thấy: với một số bản in ngắn thì hoàn toàn có thể cấp nguồn cho Raspberry Pi 3B+ từ cổng serial của Einsy RAMBo, nhưng đa số trường hợp sẽ cần thêm nguồn vượt quá khả năng của cổng này. IC ổn áp 5V nối với cổng serial của Einsy RAMBo được đánh giá mức output TỐI ĐA là 5V 2A. Dòng này dư để chạy Raspberry Pi Zero W (tối đa khoảng 1.2A), nhưng cả Raspberry Pi 3 và 4 đôi lúc có thể hút dòng vượt quá mức 2A sẵn có (lần lượt 2.5A hoặc 3A), làm máy bị treo và dẫn đến in thất bại. Vì vậy để tránh fail do sụt nguồn, tốt nhất KHÔNG nên cấp nguồn Raspberry Pi từ chân header 5V nội bộ trên Eincy RAMBo, mà nên cấp nguồn bằng adapter rời. Tuy nhiên, nếu cách này không phù hợp, bạn có thể cân nhắc đấu Raspberry Pi 3/4 trực tiếp vào nguồn tích hợp của máy in. Mình có để link adapter USB góc vuông (vì khoảng hở giữa cổng nguồn USB của Raspberry Pi và mặt bàn khá ít) và nguồn khuyến nghị ở bên dưới, trong mục “What You Need”.
Sau khi in (Post-Printing)
Hoàn thiện (Finishing)
Sau khi in xong, nhớ làm sạch các sợi filament thừa quanh những vùng overhang.
- Gỡ sạch sợi filament (hoặc supports) trong các hốc đặt đai ốc ở mặt dưới bản in
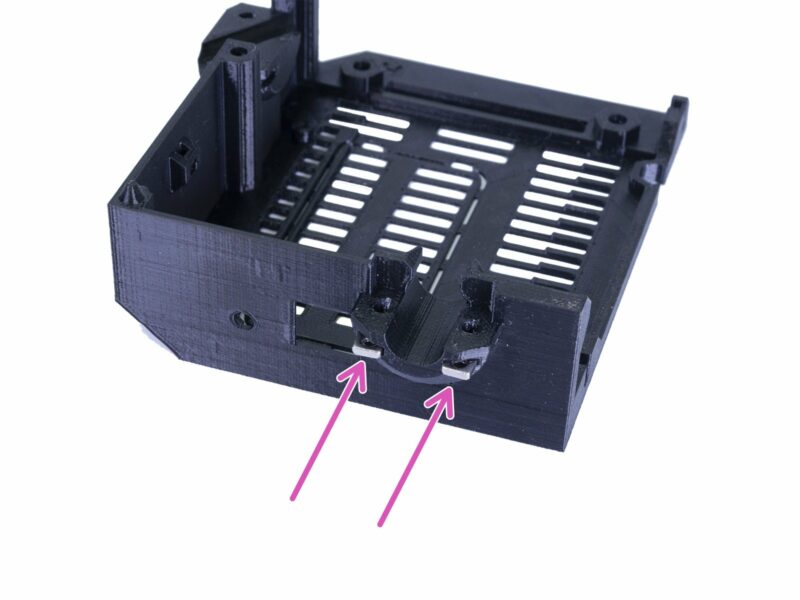
- Gỡ sạch sợi filament (hoặc supports) trong các lỗ đai ốc cho từng wire clamp
- Gỡ sạch sợi filament (hoặc supports) ở phía trên các lỗ cổng của Raspberry Pi (đặc biệt là lỗ ethernet để đảm bảo lắp vừa khít).
Mình đã thiết kế cái này như thế nào
Thiết kế (Design)
Mình thiết kế chi tiết này bằng Fusion 360 và Microsoft’s 3D Builder. Để tạo chi tiết, mình bắt đầu bằng cách import model hộp Einsy trên website của Prusa vào Fusion 360. Tiếp theo, mình tạo và extrude hai sketch để mở rộng bệ nhằm chứa Raspberry Pi. Ngay sau đó, mình import model Raspberry Pi từ GrabCAD và dùng nó để kiểm tra/đối chiếu kích thước cho phần bổ sung. File này được dùng để tạo các lỗ bắt vít và lỗ IO phía sau với khoảng cách đúng chuẩn (sau các lần test print, mình thấy lỗ cho jack ethernet có kích thước CHUẨN, lần cắm đầu tiên cần ấn lực hơn chút nhưng bù lại nhìn rất gọn, không hở khe). Cuối cùng, mình export phần thân và ghép nó với hộp Einsy do Prusa cung cấp trong Microsoft’s 3D Builder để hoàn thiện và chuẩn bị cho in 3D. (Làm vậy vì Fusion 360 nhiều lần không ghép đúng các phần để có thể export ra STL phục vụ in.)
Vật tư cần chuẩn bị
What you need:
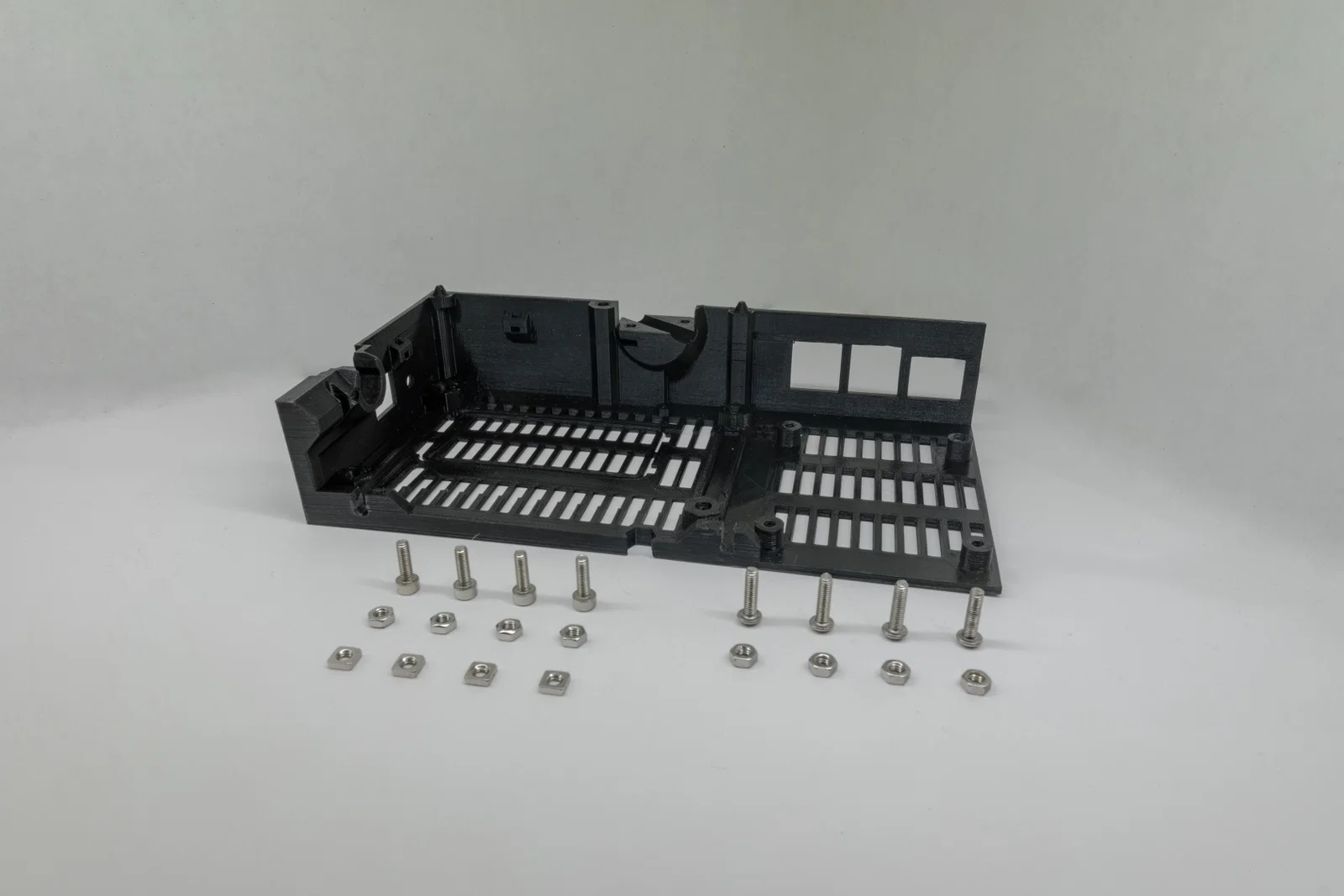
- In 1 trong 3 file được cung cấp (RECOMENDED reinforced_holes.stl — Hình minh họa: holes.stl)
- (6x) vít M3x10 (tận dụng từ chi tiết cũ)
- (4x) đai ốc M3nS (tận dụng từ chi tiết cũ)
- (4x) đai ốc M3n (tận dụng từ chi tiết cũ)
- (4x) vít M3x10 (Amazon: https://amzn.to/2Viu1xu)
- (4x) đai ốc M3 (Amazon: https://goo.gl/qQmLxH)
- 6–8 dây jumper male-female (Amazon: https://amzn.to/31OgRdL) hoặc (RECOMENDED) cáp nối Prusa i3 MK3(s) to Raspberry Pi (http://bit.ly/PiPrusaCable)
- Raspberry Pi 3B+ hoặc 4B (Amazon 3B+: https://amzn.to/336YUr4 | Amazon 4B: https://amzn.to/2pH5x51)
- Thẻ Micro SD ≤ 8gb (Amazon: https://amzn.to/2IrhsdU)
- Bộ nguồn USB (Pi 4 USB C: https://bit.ly/Pi4USBcPower) (Pi 3 Micro USB: https://bit.ly/Pi3microUSBpower)
- Dây nối dài Micro USB góc (Angled Micro USB Extension) cho Pi 3 trở xuống (Amazon: https://bit.ly/MicroUSBextension)
- Dây nối dài USB C góc (Angled USB C Extension) cho Pi 4 trở lên (Amazon: https://bit.ly/USBcExtension)
*OPTIONAL Quạt cho Raspberry Pi (Amazon: https://amzn.to/31Qk0dc)
(không bắt buộc, nhưng vì quanh Pi ít airflow nên quạt nhiều khả năng sẽ giúp tránh bị chậm/ lỗi do thermal throttling)
Lắp ráp (Assembly)
Nếu cần hướng dẫn tháo lắp chi tiết hơn, vui lòng tham khảo hướng dẫn lắp ráp của Prusa tại https://bit.ly/mk3Selecguide
Instructions:
1.) Làm theo bước 1, 8 và 9 trong Prusa Octoprint guide để cài và cấu hình Octoprint trên Raspberry Pi.
2.) Tháo hộp điện tử khỏi khung máy in bằng cách nới lỏng 2 vít bắt M3x10 bằng lục giác 2.5mm.
3.) Tháo bo điều khiển Einsy RAMBo ra khỏi hộp điện tử zin bằng cách tháo 4 vít M3x10 đang giữ bo vào vỏ.

4.) Dùng một dụng cụ nhỏ như tua vít dẹp để cạy tháo đai ốc khỏi chi tiết zin một cách cẩn thận.
5.) Vệ sinh và chuẩn bị hộp điện tử mới để lắp đặt.
6.) Lắp các đai ốc từ hộp zin sang hộp mới.
7.) Lắp thêm 4 đai ốc M3 vào hộp mới để bắt Raspberry Pi.
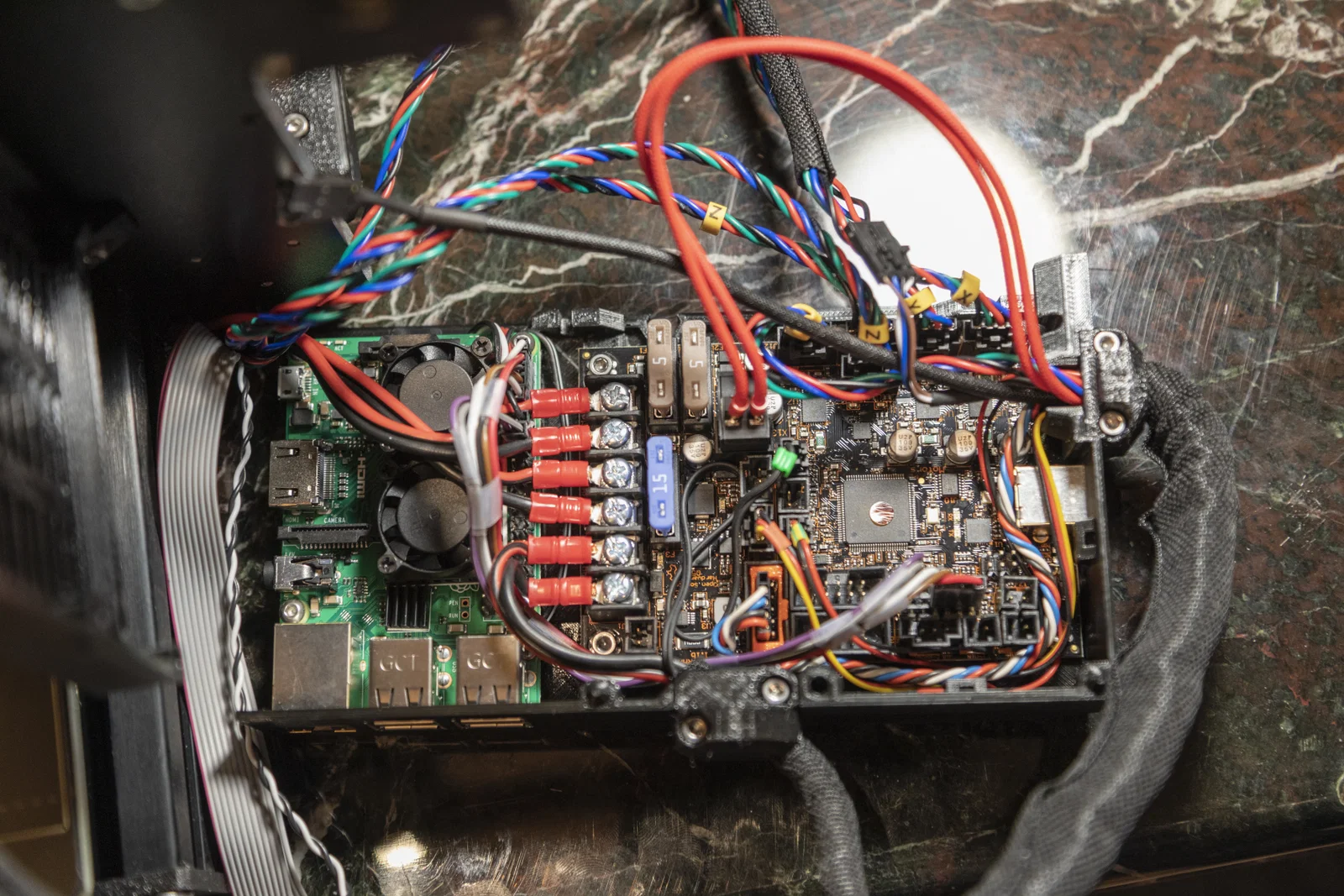
8.) Lắp bo Einsy RAMBo vào hộp mới.
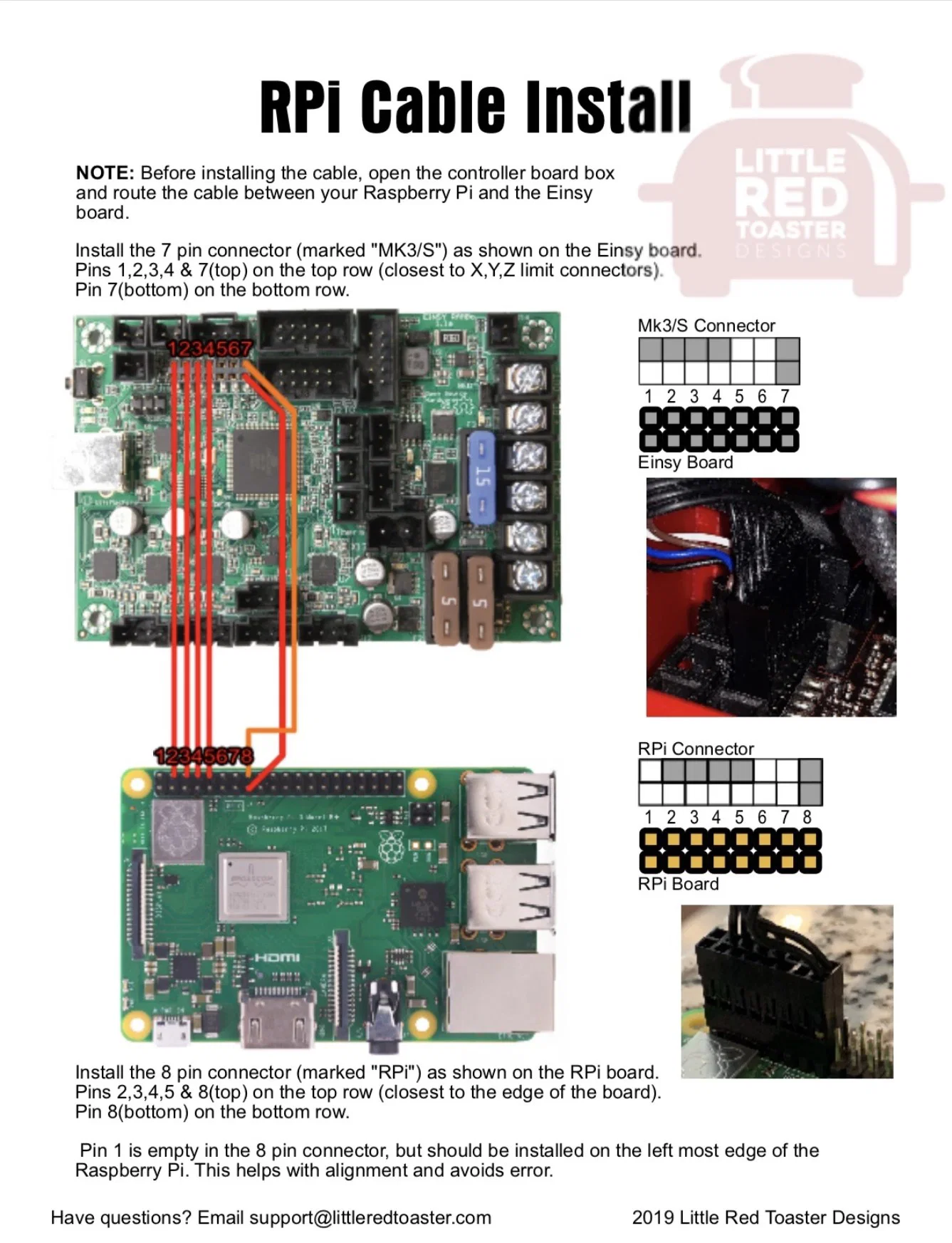
9.) EITHER Cắm 6 dây Dupont male-to-female vào cổng giao tiếp của Einsy RAMBo theo sơ đồ được cung cấp OR lắp sợi cáp làm sẵn từ LITTLE RED TOASTER DESIGNS vào cổng giao tiếp của Einsy RAMBo
10.) Lắp Raspberry Pi (đã chuẩn bị phần mềm ở bước 1) vào hộp mới bằng 4 vít M3x10
11.) EITHER Cắm đầu còn lại của 6 dây Dupont vào đúng các chân GPIO của Raspberry Pi theo sơ đồ được cung cấp OR cắm đầu còn lại của sợi cáp từ LITTLE RED TOASTER DESIGNS vào đúng chân GPIO của Raspberry Pi
12.) Lắp cụm hộp điều khiển Octoprint Raspberry Pi 3/4 hoàn chỉnh lên khung máy và cắm lại toàn bộ dây vào Einsy RAMBo theo hướng dẫn lắp ráp chính thức của Prusa. Cụ thể: làm theo các bước 8–13, 22–26, 29–38, 43 và 44.
Tham khảo (References)
Resources
Việc tạo ra hộp này được lấy cảm hứng từ mẫu “Prusa I3 MK3 OctoPrint Raspberry Pi 3+ Einsy Case” của lab27, xem tại:
- OctoPrint Case dùng để tham khảo: https://www.thingiverse.com/thing:3127643
Ngoài ra, nếu bạn muốn gắn camera Raspberry Pi lên bàn in theo kiểu giống hình đầu tiên, mình khuyến nghị dùng một bản biến thể từ mẫu “Fixed Rear Camera Mount v3 (for Prusa MK3 & Pi Cam v2.1)” của burghking tại các link sau:
-
Bản gốc cho I3 MK3 đời đầu: https://www.thingiverse.com/thing:2802597
-
Bản biến thể cho I3 MK3/MK3S đời sau: https://www.thingiverse.com/thing:3032150
Hoặc, nếu bạn muốn gắn camera Raspberry Pi lên trục X thay vì bàn in, mình khuyến nghị mẫu “Prusa I3 MK3 Raspberry Pi Camera Mount” của lab27 tại:
- Gá camera trục X: https://www.thingiverse.com/thing:3121052
Để quản lý gọn sợi ribbon cable dài hơn khi nối camera Raspberry Pi, mình gợi ý bạn hoặc quấn nó theo dây nguồn của heated bed, hoặc in mẫu “Prusa I3 MK3 Pi Camera Cable Management [clips]” của lab27 để kẹp ribbon cable sát vào dây này. Mẫu có tại:
- Kẹp quản lý ribbon cable cho Raspberry Pi Camera: https://www.thingiverse.com/thing:3102051
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình









Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!