Xe đạp tự cân bằng in 3D (Self-balancing bike) dùng reaction wheel & IMU

Mẫu xe đạp tự cân bằng in 3D dùng reaction wheel và IMU (MPU-6050), chạy Arduino để giữ thăng bằng. Phù hợp cho dự án robotics/electronics; có file hướng dẫn lắp ráp PDF và code .ino trong mục files.
1.4K
Lượt Xem
43
Lượt Thích
237
Lượt Tải
Cập Nhật Apr 22, 2026


Mô tả
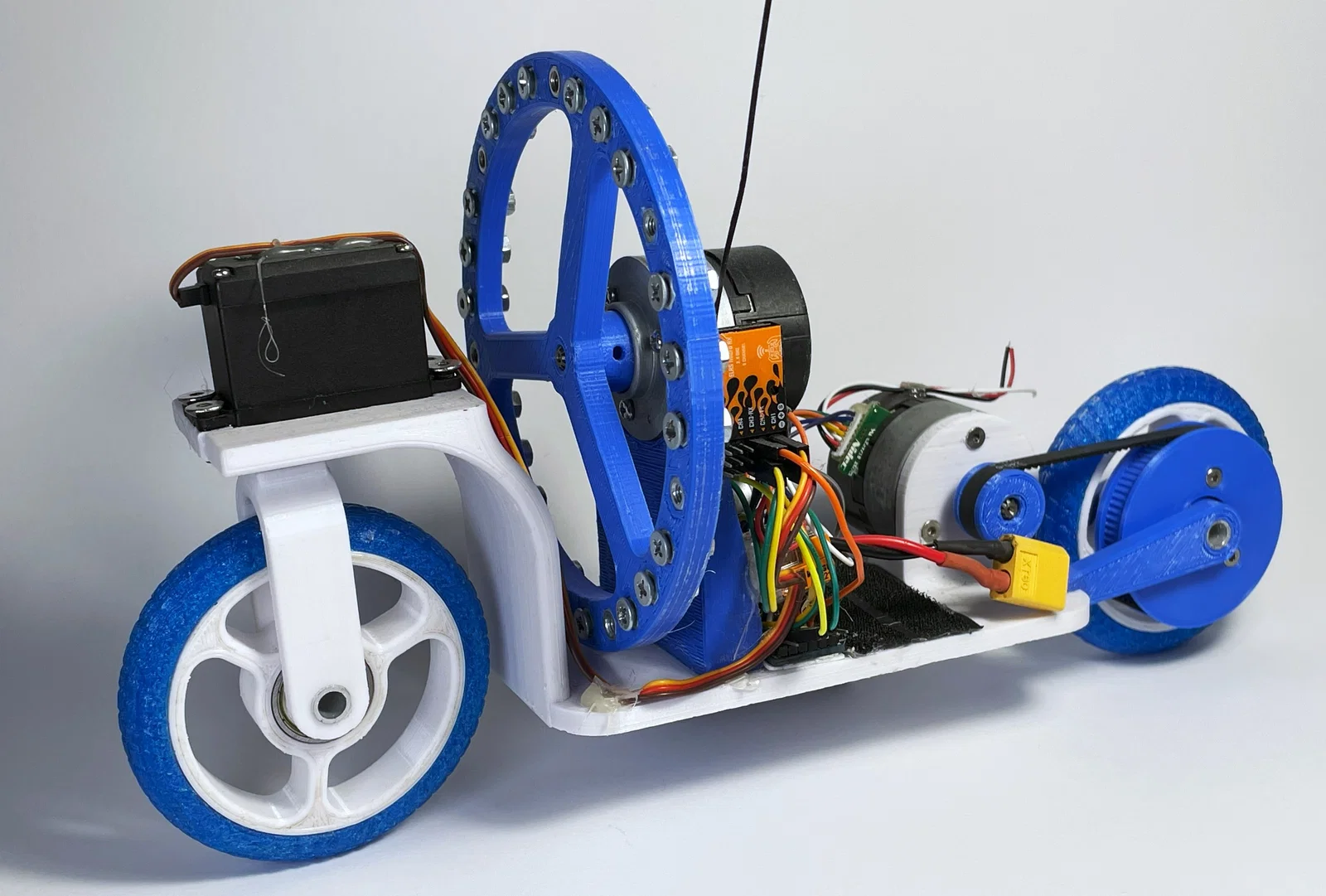
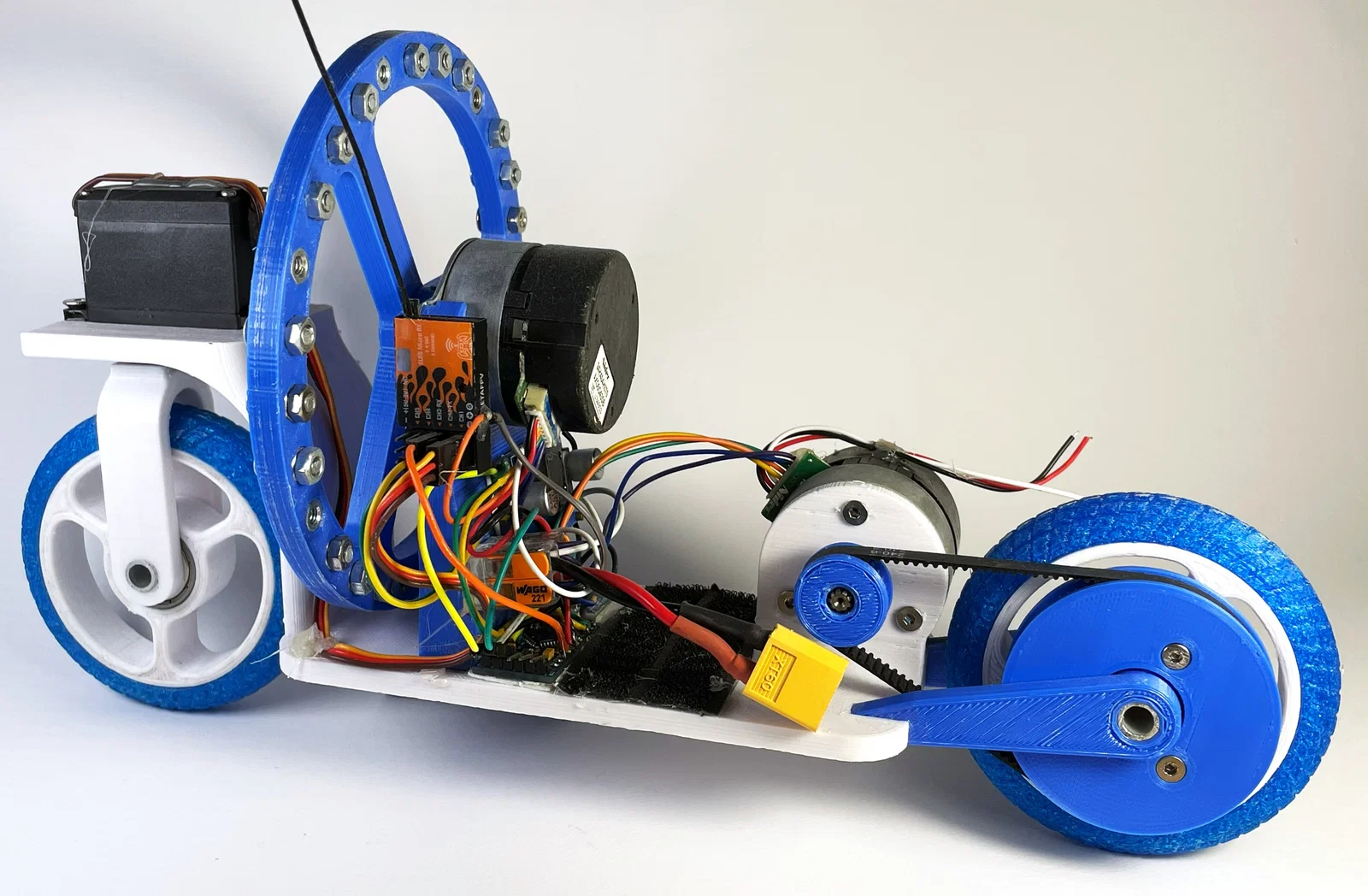
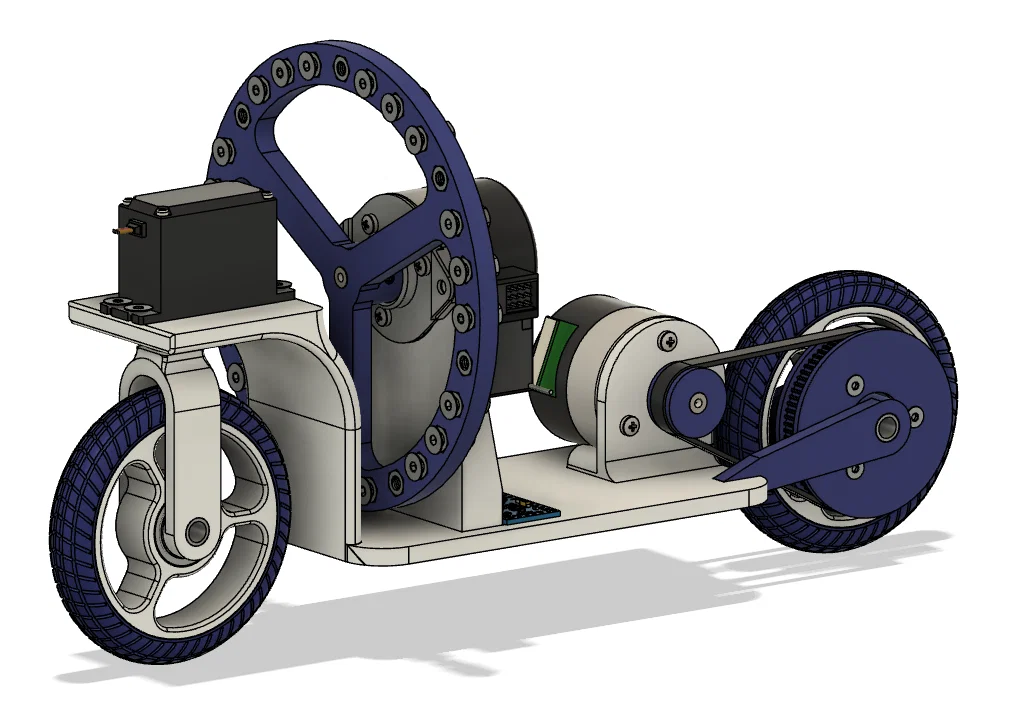
Dự án này là một xe đạp tự cân bằng in 3D dùng reaction wheel và một bộ đo quán tính (IMU) để giữ thăng bằng. Xe được lập trình bằng Arduino, rất phù hợp cho ai mê robotics, electronics và 3D printing.
Xem thêm trên Github.
Hướng dẫn lắp ráp nằm trong file .pdf ở mục files.
Phần code nằm trong file .ino ở mục files.
- Chi tiết in 3D
1 frame
1 front_wheel_mount
1 left_rear_fork
1 right_rear_fork
1 reaction_wheel_mount
1 reaction_wheel
1 front_fork
2 wheel_rim
2 wheel_tyre: in bằng TPU và infill thấp
1 wheel_pulley
1 wheel_pulley_top
1 motor_pulley
1 motor_pulley_top
- Điện tử
Arduino pro mini: bất kỳ Arduino nền atmega328p nào chắc cũng chạy được
MPU-6050 IMU
DC-DC buck converter: 24V -> 5V
2 Nidec 24H brushless motors
Pin Li-Po 6s: tối đa 1300mah do giới hạn kích thước
Servo MG995
PWM RC receiver (chuẩn 50hz, xung 1-2ms)
- Phần cứng
80 ê-cu M4: có thể cần nhiều hơn
21 bulông M4 12mm: có thể cần nhiều hơn
4 bulông M4 10mm
2 bulông M4 15mm
4 bulông M3 8mm
3 bulông M3 25mm
5 ê-cu M3
5 vít chặn (grub screw) M3 6mm: vít cho pulley phải ngắn hơn 6mm, các con còn lại 6mm
1 thanh nhôm 26mm & 1 thanh nhôm 37mm
1 dây đai GT2 closed loop 240mm
4 vòng bi 608: 8227mm
Giấy phép

File mô hình
Đang tải files, vui lòng chờ...













Vui lòng đăng nhập để bình luận.
Vui lòng đăng nhập để khoe bản in của bạn.
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!