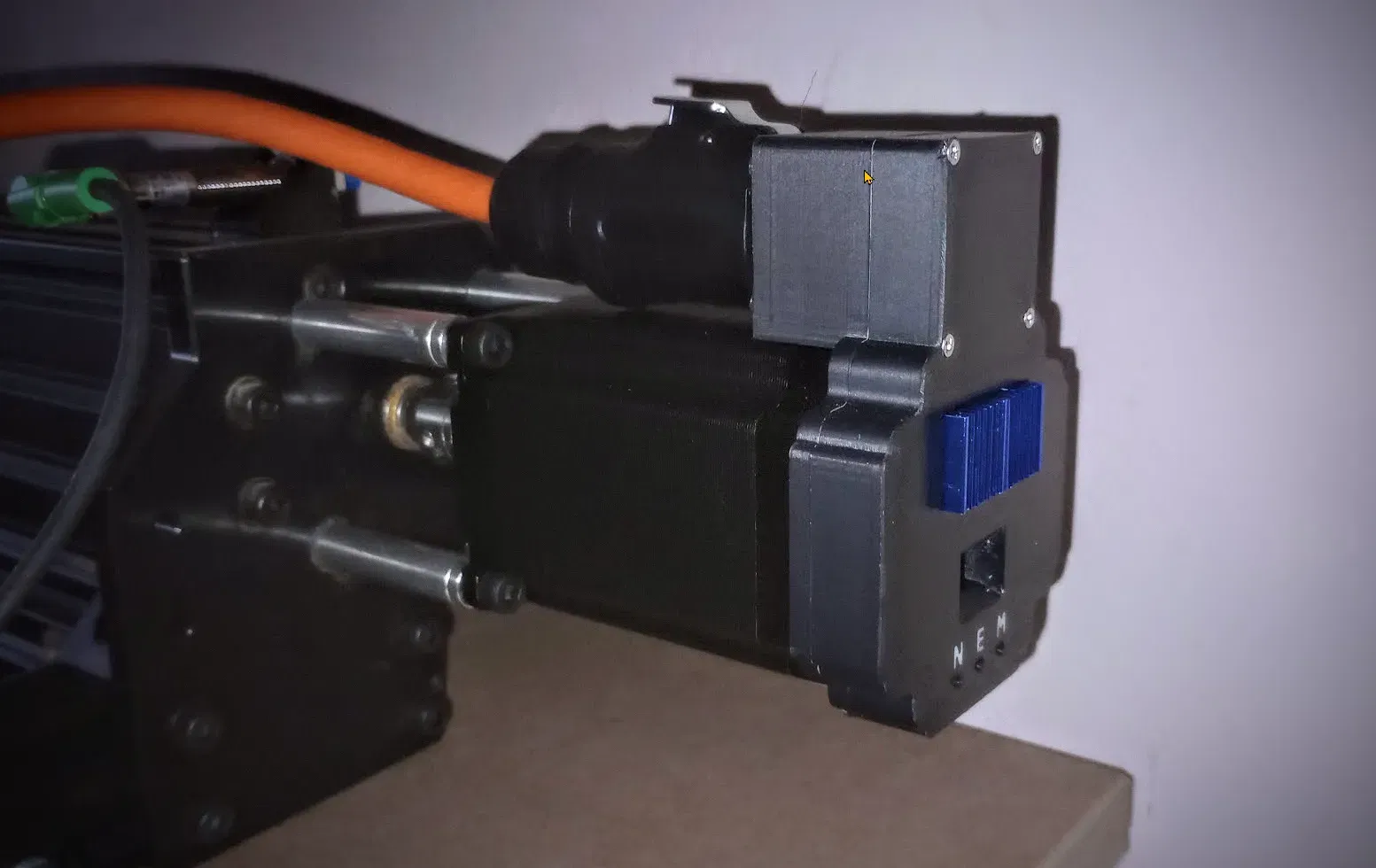
Vỏ bảo vệ servo Nema23 SERVO57C với đầu nối

Đây là một trường hợp để MKS servo57c biến bất kỳ nema23 nào là servo vòng kín. Nhưng bây giờ với một trường hợp tốt.


Mô tả
Tôi không thích vỏ do Makerbase cung cấp cho Servo57c, nó vẫn còn nhiều lỗ hở cho các mảnh chip vào và có thể làm hỏng bộ điều khiển của bạn. Tôi muốn nó trông giống như một servo chuyên nghiệp hơn ;). Vì vậy, tôi đã bắt đầu vẽ, đây là kết quả của tôi cho đến bây giờ. Tôi đang chờ các đầu nối đến.
Tôi cũng đã bao gồm dự án Fusion360. Đối với những ai muốn lắp đầu nối của riêng họ, chỉ cần chỉnh sửa bản phác thảo “ConnectorHole”. Bên trong có không gian ~ 26x26mm, bên ngoài có không gian ~ 32x32mm.
Việc remix là được phép, nhưng xin hãy nhớ tham khảo lại trang này.
LƯU Ý: - Một số động cơ Nema23 cần khoan và ren, nhưng hầu hết sẽ vừa khít. Điều này có thể dễ dàng thực hiện bằng cách tháo tấm lưng ra. - Đầu nối JST cần được gỡ bỏ khỏi PCB!
Vật liệu cần thiết:
- thiết kế cho đầu nối này, tôi chọn loại 10 pin (được giải thích bên dưới) https://www.aliexpress.com/item/4000106371464.html
- bộ điều khiển MKS Servo57c https://www.aliexpress.com/item/1005004776501066.html
- 6x 2x15 vít đầu phẳng 4x 2x20 vít đầu phẳng Tôi đã mua bộ này: https://www.aliexpress.com/item/32804897722.html
- một động cơ Nema23
- 4x bu lông đầu phẳng M3x10.
- 4x đai ốc chèn nóng M3x4x4.2. Tôi đã mua bộ này: https://www.aliexpress.com/item/1005003174906572.html
- Một dây cáp tốt, được bảo vệ và linh hoạt với ít nhất 6 dây.
Hướng dẫn in:
- Tôi khuyên bạn nên sử dụng ASA để in các bộ phận. Nhưng ABS/PETG có lẽ cũng sẽ hoạt động.
- Nút cần được in 3 lần. Những cái này khá nhỏ và khó in, thêm một vành 5mm có thể làm cho việc in dễ hơn.
- “BackAndDisplayCase” và “ButtonText” có thể được in nhiều màu. Nếu bạn không thể in nhiều màu, chỉ cần in mà không có văn bản và thêm một bộ chặn hỗ trợ ở đó.
- Các bộ phận khác nên được in với hỗ trợ.
Hướng dẫn lắp đặt:
Chuẩn bị:
- In các bộ phận
- Kiểm tra xem các núm có thể di chuyển tự do trong các lỗ không.
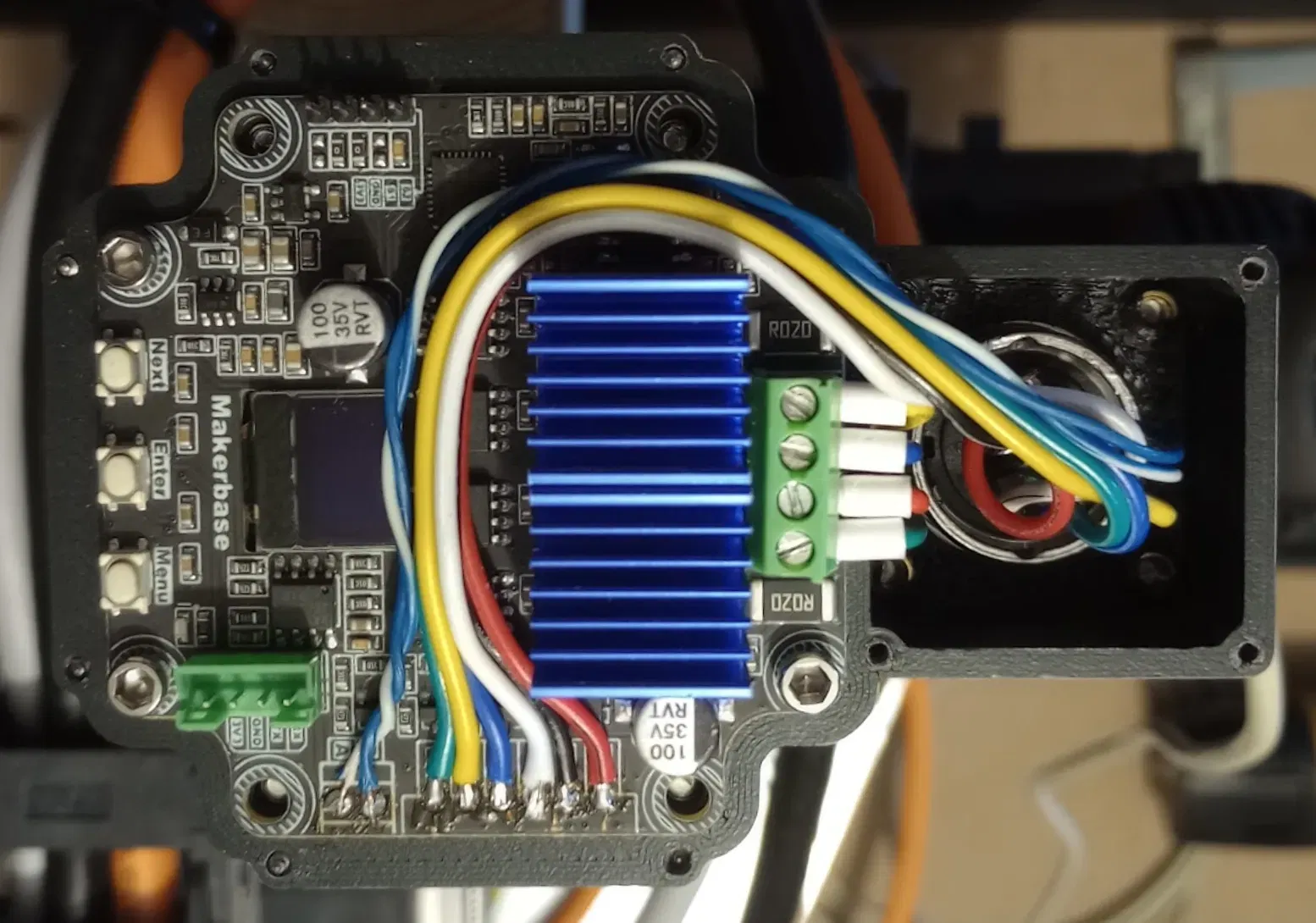
- Gỡ bỏ đầu nối JST khỏi PCB. >> Tôi đã cắt các chân ở mặt sau của đầu nối và gỡ các chân ra khỏi các lỗ bằng cách sử dụng dây hàn và một chút lực đẩy bằng mũi hàn của tôi.
- (tùy chọn) Khoan và ren các lỗ m3 trong tấm sau của động cơ bước của bạn. >> Trong trường hợp của tôi, điều này là cần thiết vì tôi không thể chèn một ốc vít M3 khác vào các lỗ hiện có. Với động cơ Nema23 từ “StepperOnline.com”, việc khoan và ren là không cần thiết.
- Chèn các đai nóng chảy bằng mũi hàn. >> Tôi luôn đặt nó ở khoảng 240 độ Celsius và kiên nhẫn một chút ;)
- Hàn các dây dài ~10cm vào đầu nối
- Gắn đầu nối vào "MotorAndConnectorCase" bằng các ốc vít đầu phẳng m3x10
- Dán nam châm vào trục của động cơ bước. >> Tôi đã sử dụng một bộ chuyển đổi in để căn giữa nam châm. Vì mỗi động cơ là khác nhau, bạn phải tự thiết kế bộ chuyển đổi này.
Cài đặt:
- Dẫn các dây động cơ qua lỗ trong vỏ đầu nối.
- Vít "MotorAndConnectorCase" với PCB vào mặt sau của động cơ bước. >> Tôi đã sử dụng các ốc vít đi kèm với Servo57C.
- Hàn các dây từ đầu nối vào các pad PCB nơi đầu nối JST đã nằm. >> Xem Ảnh thứ hai
- Kết nối các dây động cơ.
- Kiểm tra mọi thứ và thực hiện hiệu chỉnh.
- Chèn các núm và vặn "BackAndDisplayCase" vào “MotorAndConnectorCase"
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình




Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!