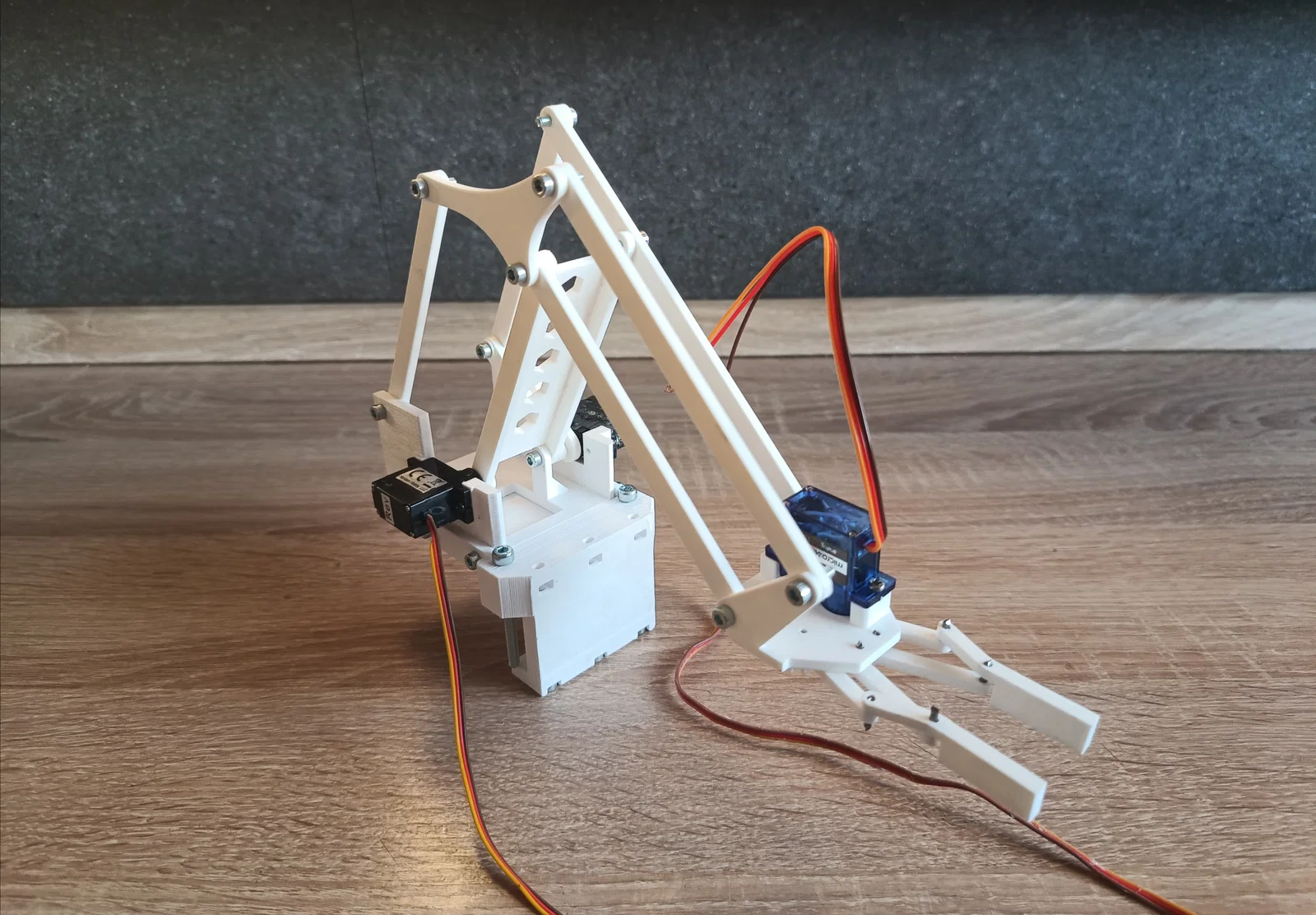
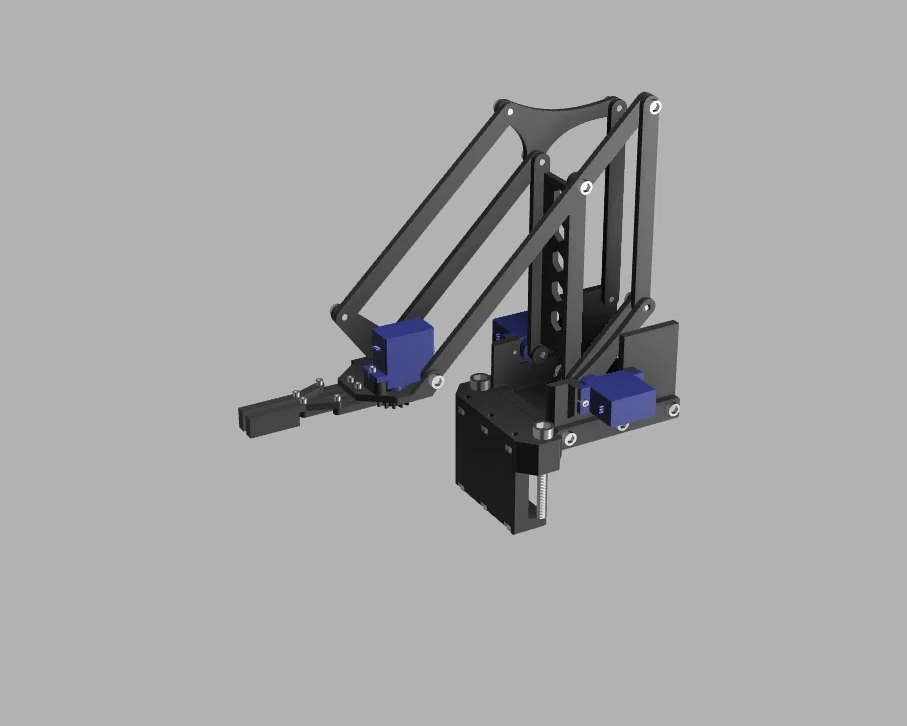
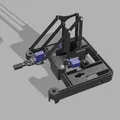
Cánh tay robot XRP (XRP robotic arm) – mẫu in 3D không cần supports

Mẫu cánh tay robot XRP 2 trục, kẹp 2 hàm để gắn lên robot XRP, giúp thao tác vật thể. Thiết kế tối ưu in 3D không cần supports, dùng 3 servo MG90S 14g và bộ vít M2/M3/M4 theo danh sách kèm hướng dẫn lắp ráp.









Mô tả
Tổng quan
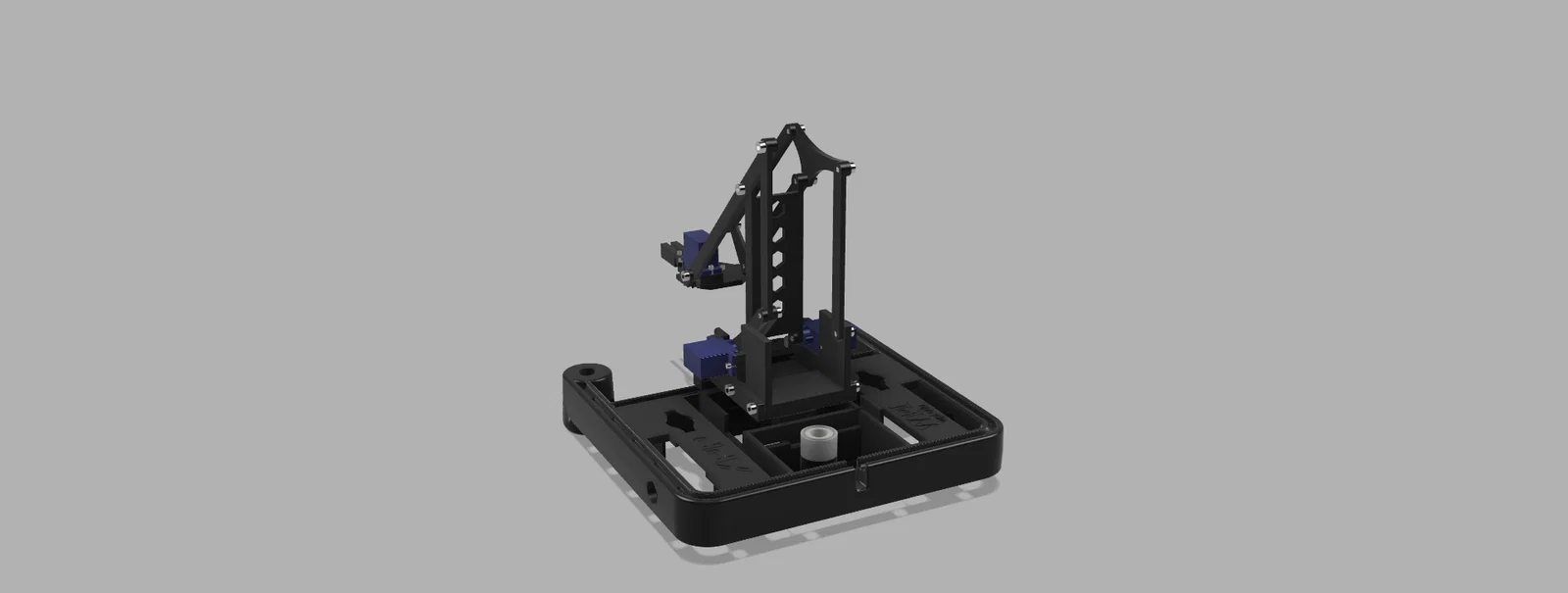
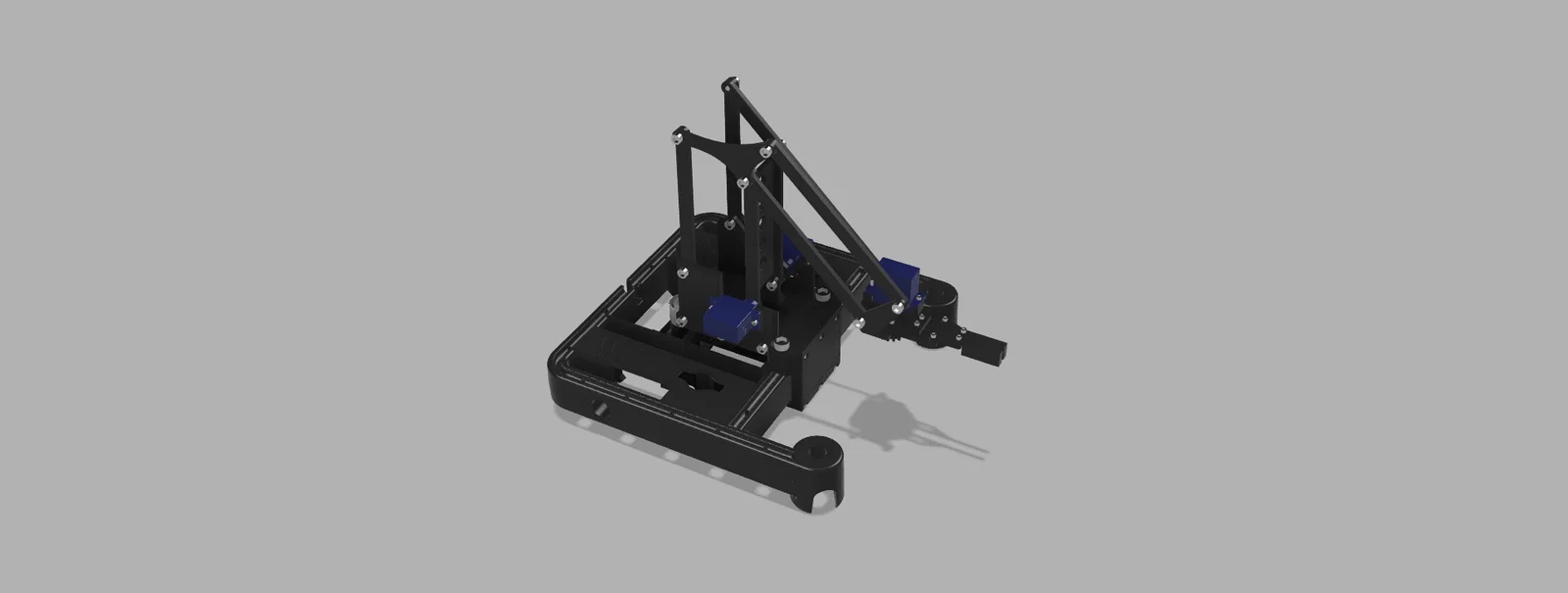
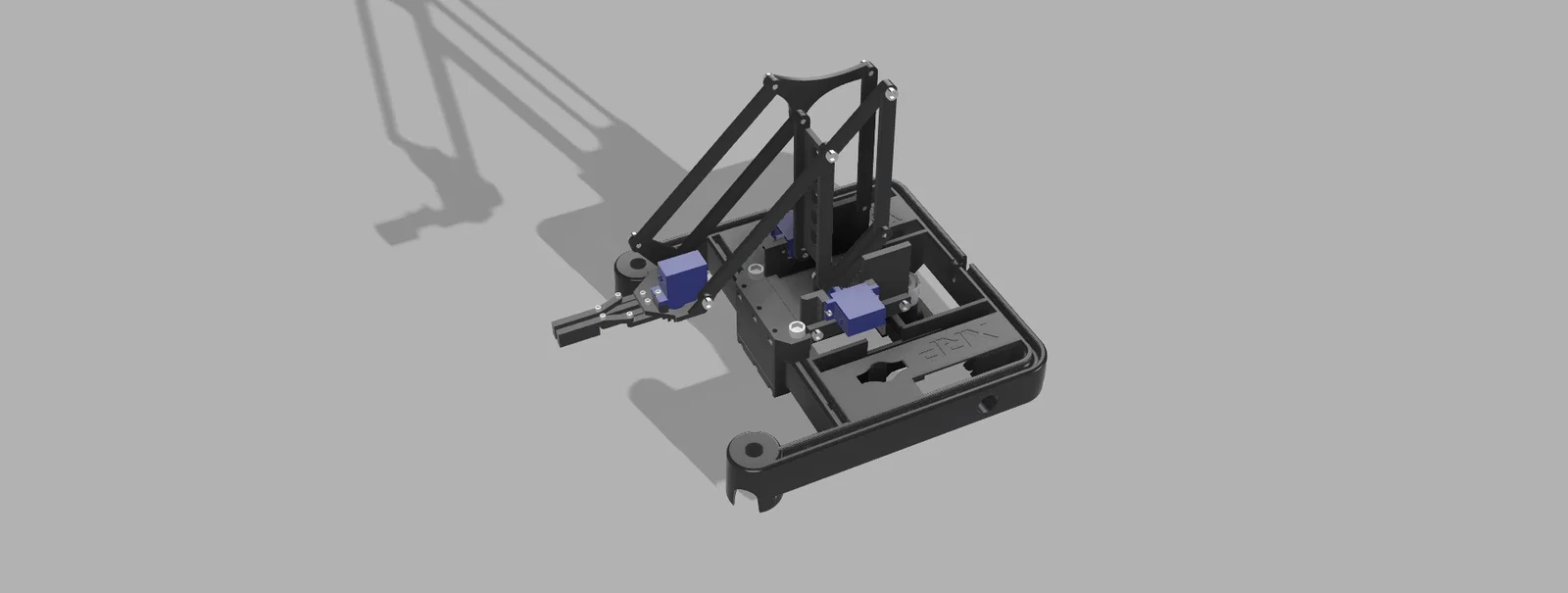
Đây là mẫu kit cánh tay robot. Cánh tay gắn với robot XRP giúp bạn thao tác/di chuyển các vật thể. Khi lắp ráp bộ kit này, học sinh sẽ có cái nhìn tổng quan về thế giới robotics không chỉ ở mảng programming mà còn ở phần cơ khí.
Phần cứng (Hardware)
Thiết kế này dùng cho phần truyền động: ba servo MG90S 14g. Mình không đủ servo MG60S nên phải dùng một con khác để chụp hình.
Có thể dùng vít lục giác chìm (socket head) để lắp cánh tay: ba vít M3x5, năm vít M3x6, chín vít M3x10, mười ba vít M2x4, hai vít M4x40, và ba vít M3x40.
Các vít còn lại để bắt servo là phụ kiện đi kèm theo servo motor.
In 3D (Printing)
Mẫu này được thiết kế để in không cần supports. Nếu bạn dùng máy in đời cũ và không chắc máy có in ổn khi không có supports hay không, cứ thêm supports cũng được, tùy bạn. Bạn có thể cần chỉnh lại kích thước lỗ vít cho khớp với kích thước thực tế mà máy in của bạn tạo ra.
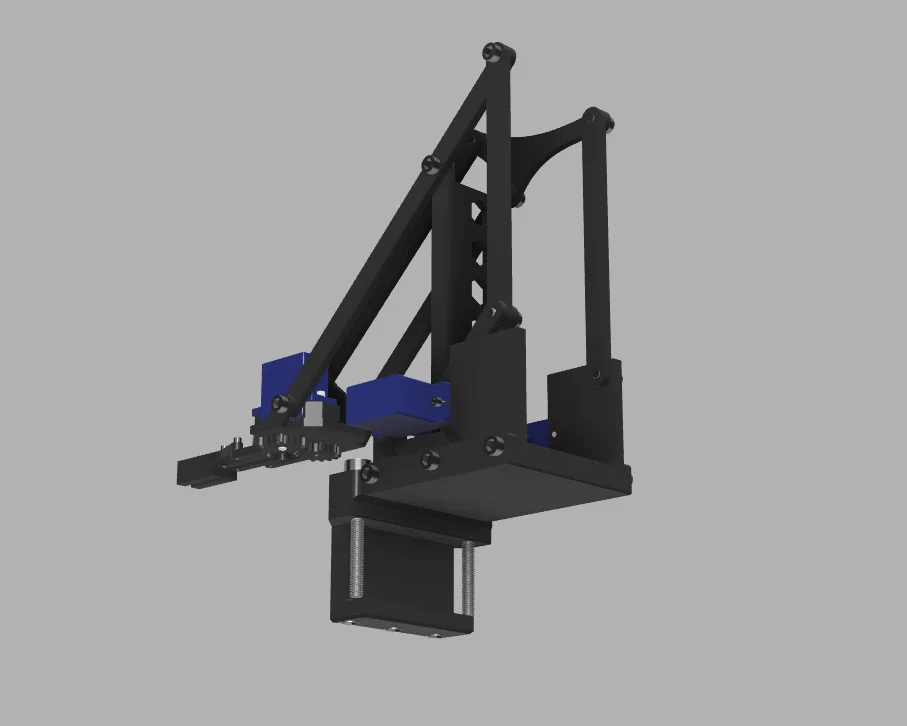
Hướng dẫn lắp ráp (Assembly instructions)
-Bắt servo motor vào đế kẹp (gripper base) (1) bằng vít M2x4

-Sau đó bắt các tay răng cưa (toothed arms) (2),(2.1) vào đế (1) bằng vít M2x4

-Bắt các tay trong của hàm kẹp (inner arms) (3) vào đế (1) bằng vít M2x4

-Bắt các hàm kẹp (jaws) (4),(4.1) vào tay (2),(2.1),(3) và đế (1) bằng vít M2x4

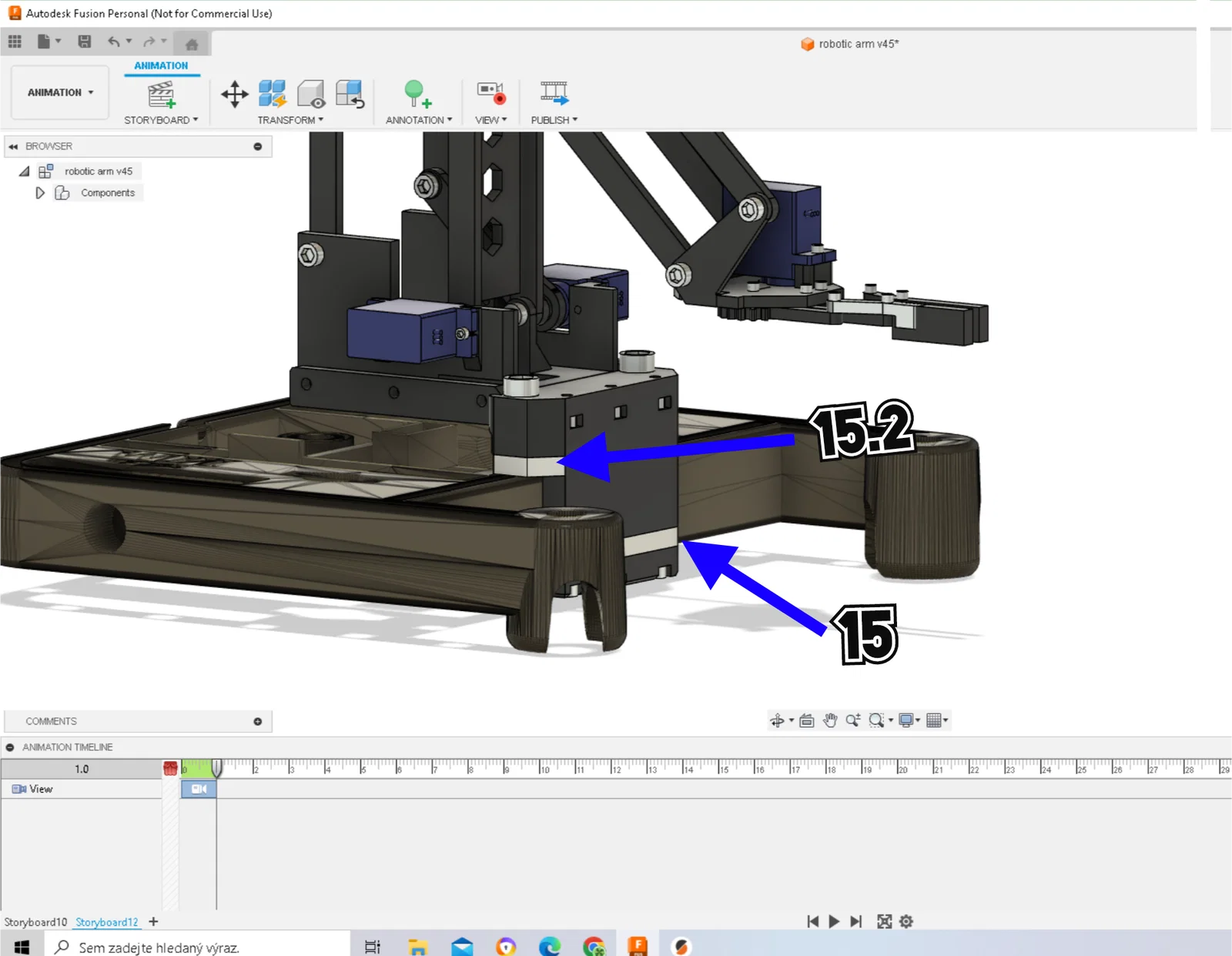
-Bắt đế của cánh tay (5) vào thanh chính (main beam) (6) và tay (16) bằng vít M3x10

-Ấn rotor của servo motor vào lỗ trên thanh chính (6)

-Bắt servo motor vào đế (5) bằng vít M2x4

-Bắt tay đòn servo (servo motor lever) (7) vào servo

-Bắt đế (5) vào ngàm giữ tay (arm holder) (8) bằng vít M3x10

Bắt phía còn lại của ngàm giữ tay (8) vào đế (5) bằng vít M3x10

Vặn vít M4x40 vào lỗ trên ngàm giữ tay (8) và dùng đai ốc M3

Bắt phần dưới của giá đỡ (bracket) (8.2) bằng vít M3x40

Bắt tay 2 lỗ (two-hole arm) (9) lên thanh chính (6) bằng vít M3x6.

Bắt phần tay (10) vào thanh chính (6) và tay 2 lỗ (9) bằng vít M3x6

Bắt tay (11),(12) và (13) vào khớp (joint) (14) bằng hai vít M3x6, một vít M3x10

Bắt tay (11) vào đế (5) bằng vít M3x6

Bắt bộ kẹp (Gripper) với các tay bằng vít M3x5

Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình




















Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!