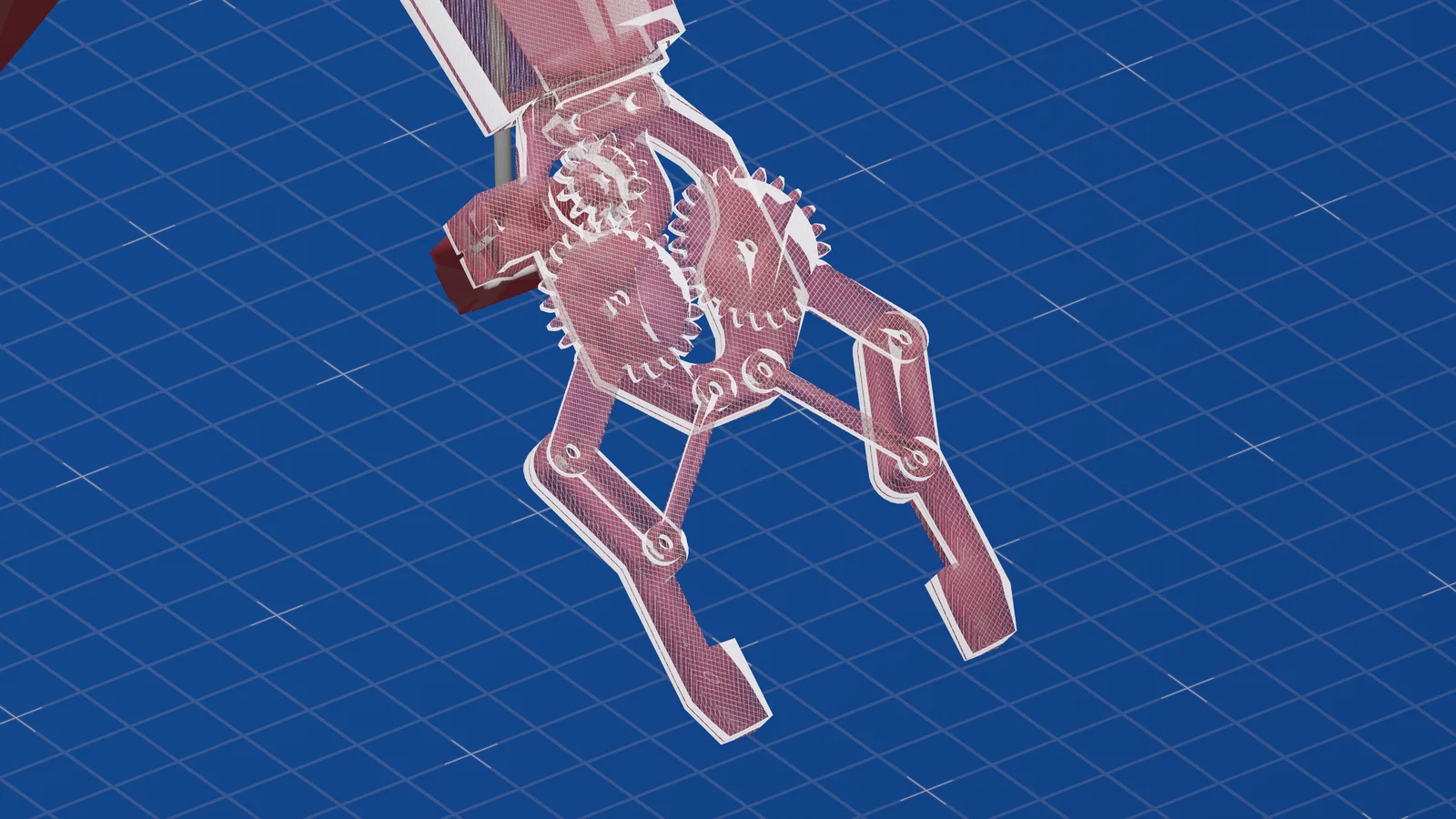
Bản Remix Cánh Tay Robot: Thiết Kế Kẹp Đơn Giản với Tỷ Lệ Truyền Động 2:1 và Tùy Biến Phần Cứng

Đây là phiên bản cải tiến dựa trên thiết kế trước đó để khắc phục các lỗi cũ. Dự án đã được hoàn thiện vào ngày 6 tháng 5 năm 2024. Cánh tay sử dụng servo mg995 và sg90, lắp ráp bằng vít M3, đảm bảo hoạt động ổn định với thông số in tiêu chuẩn.
1.1K
Lượt Xem
14
Lượt Thích
137
Lượt Tải
Cập Nhật Apr 21, 2026
Mô tả
Mình đã sử dụng 3 servo mg995 và 1 servo sg90 cho bộ phận kẹp để vận hành cánh tay robot. Toàn bộ thiết kế được lắp ráp bằng ốc vít M3. Sau khi tinh chỉnh lại thiết kế, mình đã in với mật độ infill thông thường từ 15-20% và không thấy gặp vấn đề gì cả.
Giấy phép

File mô hình
Đang tải files, vui lòng chờ...








Vui lòng đăng nhập để bình luận.
Vui lòng đăng nhập để khoe bản in của bạn.
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!