Schatz Shaker V1: Máy lắc sơn motor linh hoạt theo cơ cấu Schatz

Máy lắc sơn dùng cơ cấu Schatz linkage, kẹp lọ bằng bộ “Twist Tighten” và dây thun để lắc được nhiều cỡ chai (Vallejo Air tới Primer). Chủ yếu là chi tiết in 3D, thêm ốc, bearing, dây thun và motor.



Mô tả
Mình không khuyến nghị dùng cái này nữa, vì ngay cả mấy cái vortex mixer “cùi” trên AliExpress cũng làm tốt hơn và gọn gàng hơn cho việc trộn hằng ngày. Cái này vẫn có ích với mấy lọ sơn quá cũ cần lắc lâu dài, nhưng nhu cầu đó khá ngách, ít người cần hơn bạn tưởng.
V2 rồi sẽ có.
OLD
--------------------------------------------
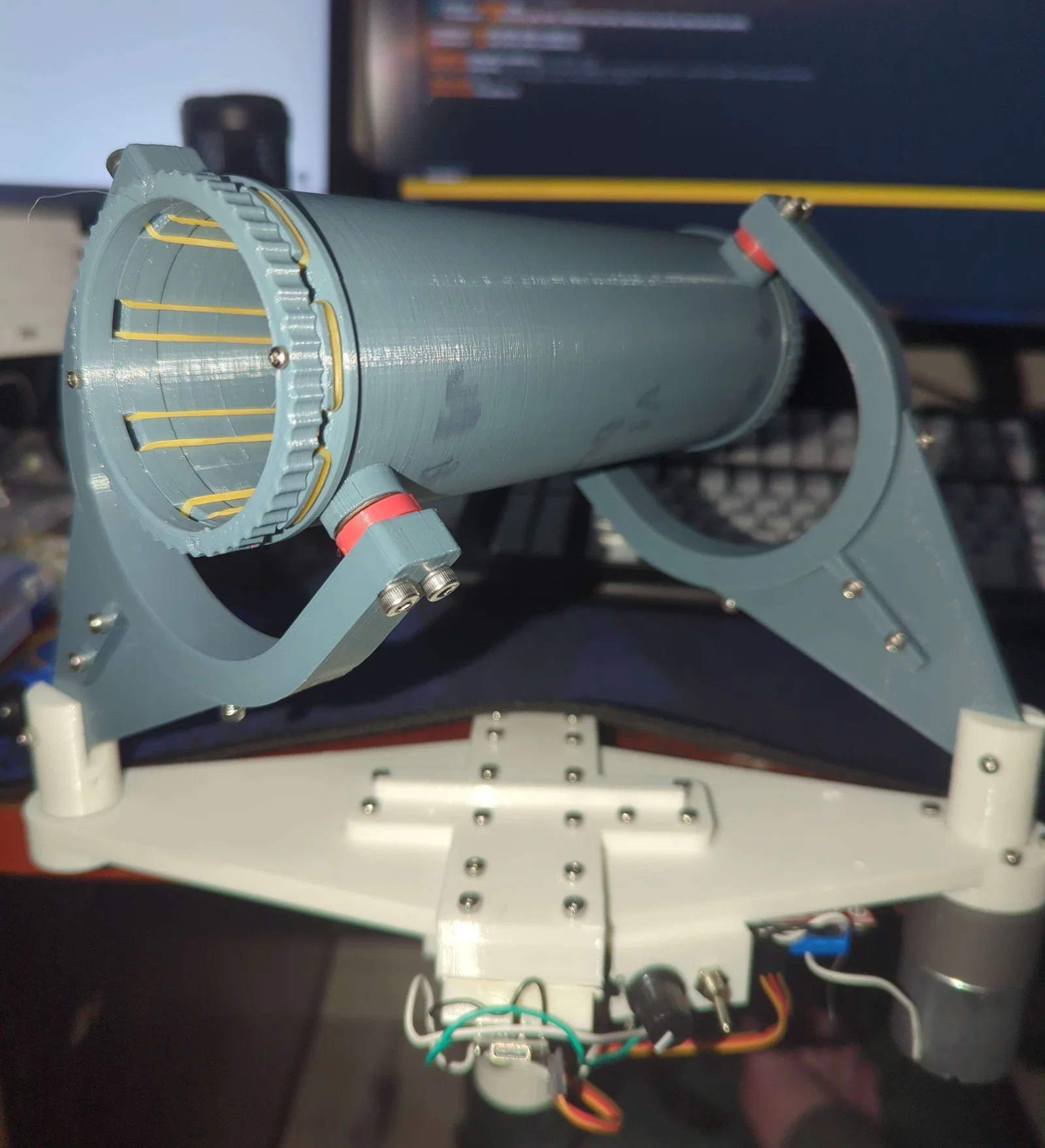
The Schatz Shaker là một bản triển khai của cơ cấu liên kết Schatz (Schatz linkage), như hình bên dưới.
Set up không quá phức tạp, và số linh kiện không in 3D là tối thiểu: chủ yếu là ốc vít, dây thun, motor và bearing.
Nó lắc. Nói chung cũng không có gì quá ghê gớm. Lọ sơn được giữ bằng hai cái đĩa xoay có dây thun kẹp lại. Cũng đơn giản thôi nhưng nhìn khá hay. Thiết kế này giữ được từ chai Vallejo Air đến chai Vallejo Primer, và chắc là mọi kích cỡ ở giữa nữa.


DANH SÁCH PHỤ TÙNG (theo từng cụm):
UPDATES:
2023-10-22: V2 trục không gắn motor (Motorless shaft) vẫn cần một bearing, nhưng giờ nối bằng ốc M4 14mm + washer thay vì cách cũ! Siết đúng lực thì cứng cáp hơn nhiều. Nên dùng cái này!
2023-10-21: V2 trục motor (motor shaft) giảm số lượng skateboard bearing đi 1 cái, và tốt hơn! Nên dùng cái này thay cho setup V1!
Motor: https://www.amazon.ca/dp/B072R57C56?ref=ppx_yo2ov_dt_b_product_details&th=1
Motor khác có thể cũng chạy, nhưng đây là cái mình có sẵn! Lưu ý RPM bạn cần có thể thay đổi tùy cách bạn điều khiển, đọc thêm bên dưới!
- [5x14x5mm Bearings] * 6 (bearing cho Drum và Swing Arm)
- [7x22x8 Skateboard Bearings] * 2 (bearing cho Base Shaft)
- [dây thun 50mm] * 10
Và về ốc vít: (không cần tất cả các loại này, nhưng…)
- [M3x20mm] * 6 (Motor Mount)
- [M3x20mm] * 8 (Top Bracket)
- [M3x16mm] * 8 (Base Arm Supports)
- [M3x12mm] * 4 (Top Plate)
- [M4x14mm] (kết nối bearing của Swing Arm)
- [M3x16mm] * 2 (kết nối Swing Arm với Shaft)
- [M3x16mm] * 2 (kết nối Shaft với Bearing)
- [M3x16mm] * 4 (lắp ráp Swing Arm)
- [M3x12mm] * 4 (Swing Arm Support)
- [M2x8mm] * 8 (giữ band connector holder)
Thiết kế phần đế không kèm mạch điều khiển nào, và cũng không nhắm tới một setup cụ thể nào ngoài cái motor! Người dùng tự xử phần này, nhưng bên dưới có vài lựa chọn.
Phương án đơn giản: (RPM motor gợi ý: 50 (ở 12V) hoặc 100 (tùy!))
Nguồn cấp trực tiếp: Bạn có thể gắn một barrel jack cấp thẳng vào motor và thêm công tắc. Motor mình dùng chạy @ 100RPM @ 12V. Thực tế sẽ hợp hơn ở khoảng 8–10V, vì chạy full power thì nó “quậy” hơi quá. Cứ thử nghiệm!
L298N Motor Controller: (RPM motor gợi ý: 100)
Bạn có thể dùng module điều khiển motor L298N, mua ở đâu cũng có. “Base Clamp” được thiết kế để bạn dán/đặt một breadboard trực tiếp lên đó (nếu bạn tháo phần power rails). Lưu ý: dùng kiểu này thì motor sẽ phát tiếng rít nếu bạn không chạy full speed. Có kèm code ví dụ để điều khiển bằng potentiometer (250k), nhưng như mình nói, cứ thử tinh chỉnh thêm. Mình không kèm phần hardware để gắn, và những gì bạn thấy trong video promo là mình tự xoay: khoan lỗ bắt ốc, dán CA glue, hoặc bẻ nhựa dư từ một bản in hỏng làm cái pát để gắn công tắc.
Example Code:
//pins
int L298N_IN3 = 2;
int L298N_IN4 = 4; //second motor output, what we're using here.
int L298N_ENB = 3;
int MAX_SPEED_THRESHOLD = 430; // Lowest the pot gets
int MIN_SPEED_THRESHOLD = 710; //highest it gets
int MIN_MOTOR_SPEED = 120;//what speed's the minimum before it doesn't work?
int MAX_MOTOR_SPEED = 240;
//max is 255.
void setup() {
Serial.begin(9600);
pinMode(L298N_IN3,OUTPUT);
pinMode(L298N_IN4,OUTPUT);
pinMode(L298N_ENB,OUTPUT);
digitalWrite(L298N_IN3,LOW);
digitalWrite(L298N_IN4,LOW);
digitalWrite(L298N_ENB,LOW);
digitalWrite(L298N_IN3,HIGH);
}
void loop() {
// put your main code here, to run repeatedly:
int potValue = analogRead(A0);
int ScaledResult = map(potValue,MIN_SPEED_THRESHOLD,MAX_SPEED_THRESHOLD,MIN_MOTOR_SPEED,MAX_MOTOR_SPEED);
ScaledResult = min(MAX_MOTOR_SPEED,ScaledResult);
ScaledResult = max(MIN_MOTOR_SPEED,ScaledResult);
analogWrite(L298N_ENB,ScaledResult); //set motor speed
Serial.print(potValue); //can use this to see the high/low values the pot gives out. use this to adjust the min/max respectively.
//if it's backwards, reverse the gnd/5v pins from the pot to invert it
Serial.print(",");
Serial.println(ScaledResult);
}CÂN NHẮC ĐẶC BIỆT KHI IN:
Một số chi tiết sẽ quá yếu nếu bạn in theo kiểu “nhìn là in vậy”
Trục (Motor & MotorLess) cần được in nằm ngang, lỗ hướng lên. In dựng đứng sẽ quá mỏng manh (mà dù in ngang thì trục motor vẫn là món dễ gãy nhất lúc lắp ráp!)

Hai tay đòn của Base (cả bên motor lẫn bên không motor!) cần in infill cao để đủ cứng! Cái này áp dụng cho đa số chi tiết “base”. 40% là dư dùng rồi.
Ống lót bearing của Arm (Arm’s bearing sleeve) không BẮT BUỘC, nhưng giảm rung/lạch cạch thấy rõ. Tuy nhiên nó hơi khó in và hơi cực lúc ráp.
Mình có kèm file Fusion, hy vọng giúp việc lắp dễ hơn trong lúc mình đang viết hướng dẫn. Bearing không được model trong file, nhưng nhìn vào là biết nằm chỗ nào!
Những món cần in:
1x mỗi file thuộc nhóm “base” (xoay sao cho lỗ bắt ốc hướng lên, dùng tree supports!)
“Base Arms” cần infill cao! 40% trở lên!
1x Main drum (dùng tree supports, xoay lỗ hướng lên)
4x “Drum Bearing Interface”
2x “Rubber Band Lid Base” và “Rubber Band Lid Cap” - gắn mỗi bên của drum. Không cần keo!
2x tất cả các món còn lại trong “Linkage Arms”
2x “Arm Bearing Sleeve” (xoay lỗ hướng lên) *(Không bắt buộc, nhưng có thì ngon)
1x “Motorless Shaft”
1x “MotorShaft”
2x “Shaft Arm Mount”
Lưu ý khi lắp ráp:
Cần 10 sợi dây thun. 8 sợi dùng như bạn nghĩ, còn 2 sợi quấn quanh Band Lid và drum để tăng độ bám!
Đừng dùng motor shaft cũ! Bản mới cứng hơn nhiều, lại khỏi cần thêm bearing!
Kéo dây thun khá là cực, nên dùng một đoạn móc áo (coathanger) uốn cong để móc cho dễ!
Bearing nên được ép sát (flush) với mặt nhẵn của chi tiết!
Lắp bearing sleeve vào bearing trước sẽ giúp ráp dễ hơn nhiều, vì bạn canh lỗ sẽ chuẩn hơn.
Giấy phép

File mô hình



















Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!