Mod selector ERCF V2 cho servo lớn 28mm (17g)

Mod này nâng cấp selector ERCF V2/V1 để dùng servo lớn 28mm (17g) thay cho micro servo 23mm thường yếu. Giúp tăng lực/torque, giảm lỗi khó chẩn đoán khi đè top hat, kèm STL, BOM, hướng dẫn lắp và test Gcode.








Mô tả
version2 giờ đã phát hành
# ERCF V2 selector mod for larger 28mm (17g) servo
## What:
Dành cho ERCF V2 Enraged Rabbit Multimaterial System.
https://github.com/Enraged-Rabbit-Community/ERCF\_v2
Trong thiết kế ERCF V2 và V1, người ta dùng micro servo 23mm.
Servo nhỏ cỡ đó thường khá yếu, không đủ torque/lực cần thiết để đè cần servo (servo arm) và bánh răng xuống.
Việc này đôi khi gây ra lỗi khó nhận ra, và dẫn tới nhiều vấn đề in “lạ” khó hiểu.
Mod này giúp hỗ trợ servo lớn hơn: 28mm hoặc 17g servo.
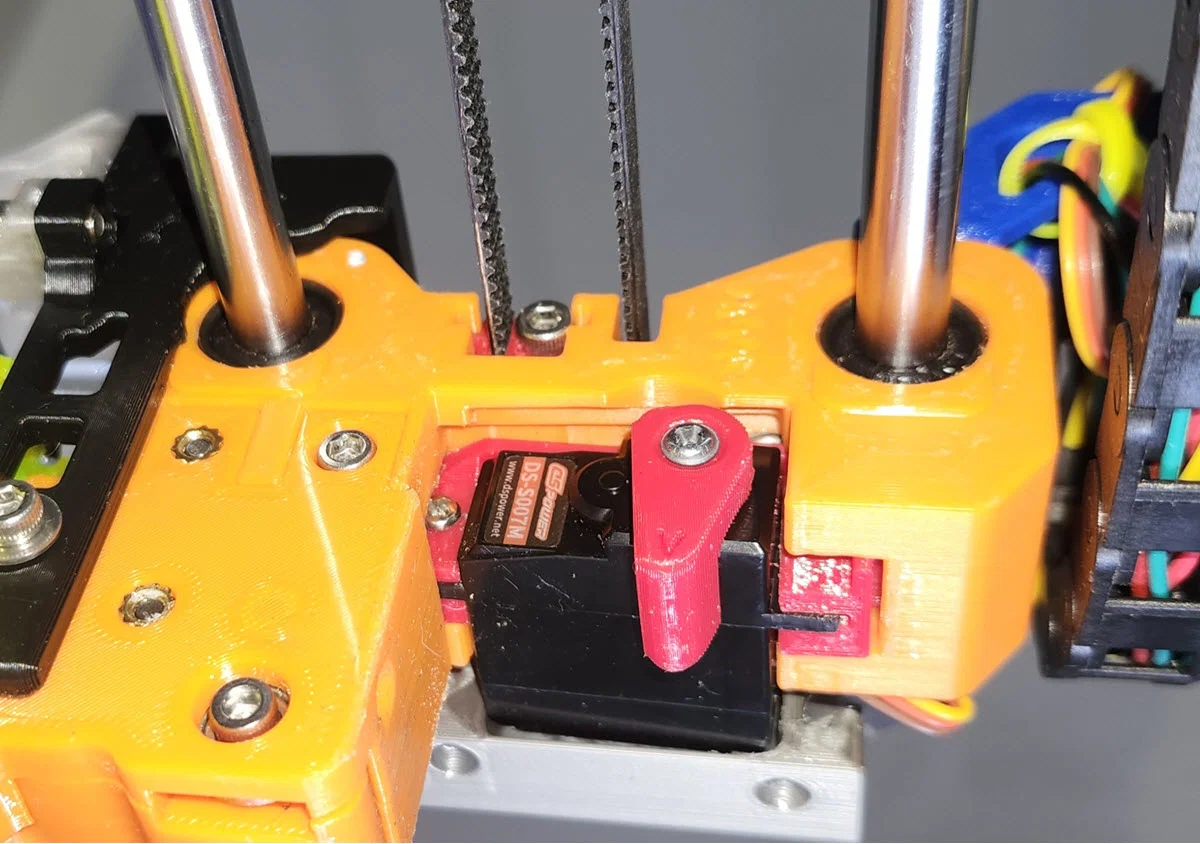
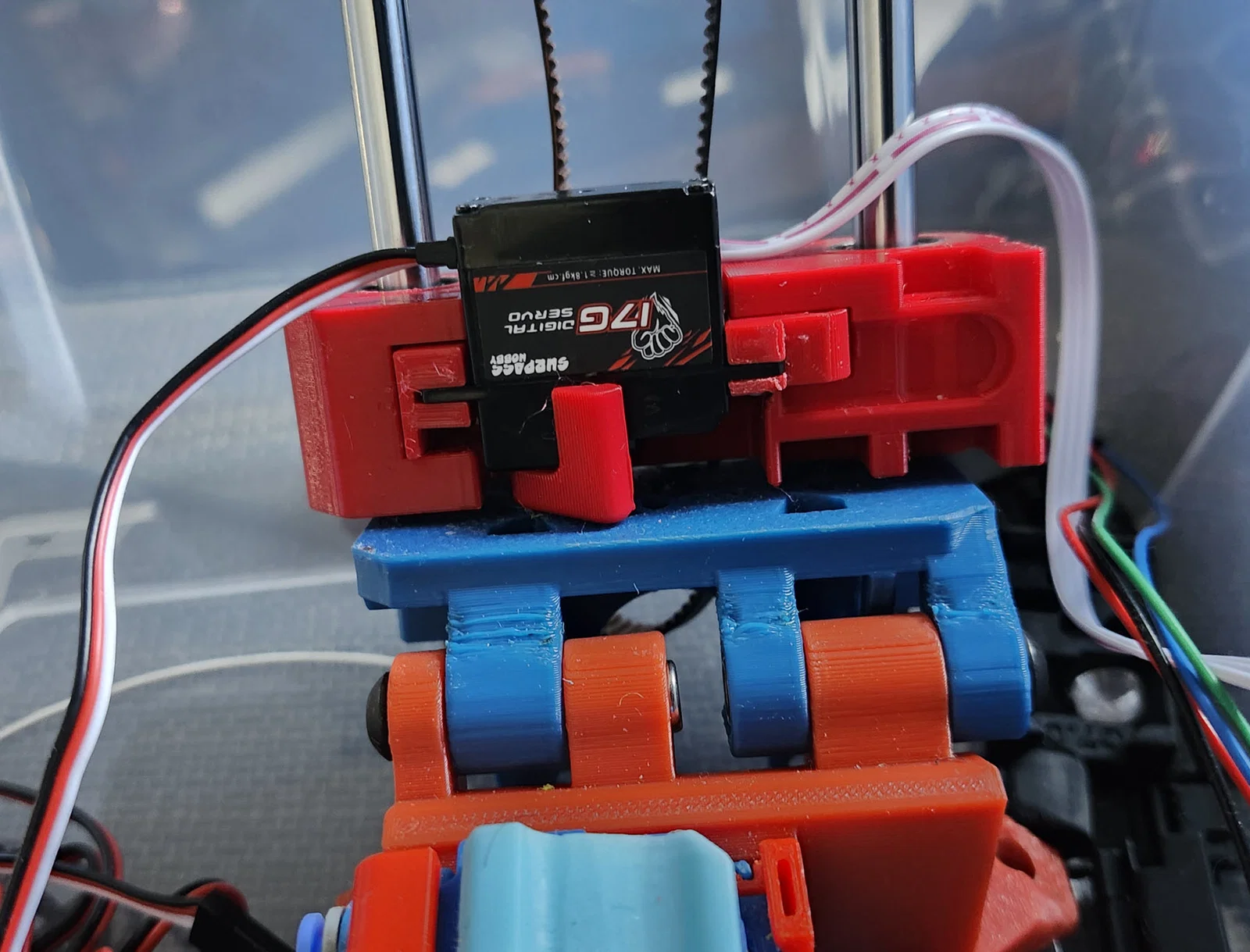
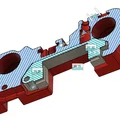
Hình selector gắn servo 28mm trên ERCF V2

Đã lắp servo 28mm

## Why:
ERCF V2 cần một con servo mạnh hơn nhưng giá hợp lý.
Servo 23mm rẻ tiền thường yếu, đôi khi bị hụt lực khi đè xuống.
Mình không khoái ý tưởng phải mua một con servo 23mm “xịn” giá cao (50$? 100$???) mà chưa chắc đã cho ra torque lớn hơn.
### Nhiều tính năng trên servo nhỏ mắc tiền là không cần thiết trong ứng dụng của mình.
Trong ứng dụng multi-material system này:
- kích thước servo không quan trọng hoặc không nên quan trọng—đây không phải xe RC, không gian không bị bó cực gắt do bản chất ứng dụng;
- trọng lượng servo không quan trọng—đây không phải trực thăng RC
- tốc độ servo cũng không quan trọng—0.01s hay 0.1s để đè bánh răng filament xuống không ảnh hưởng tốc độ in hay tốc độ đổi filament.
Vậy nên nhiều “feature” của servo xịn mắc tiền là vô nghĩa trong ứng dụng này; mua là tốn tiền.
ERCF chỉ cần đủ lực.
### Làm cho chạy được với chi phí thấp.
Mục tiêu của mod này là làm selector ERCF V2 chạy được với servo 28mm (17g servo) — loại phổ thông, giá hợp lý hoặc rẻ — để mình có thể mua servo rẻ (hoặc mua vài con) mà vẫn có torque lớn hơn.
Thiết kế một lần, lợi cho mọi bộ ERCF, sẽ hay hơn là cố thiết kế “nhỏ” rồi mỗi bộ bắt người dùng mua servo xịn 50$–100$.
Với kích thước lớn hơn (28mm so với 23mm), thân servo dễ chứa bánh răng lớn hơn hoặc nhiều bánh răng hơn, motor lớn hơn, PCB/IC driver lớn hơn; vì vậy dễ cho ra torque/lực lớn hơn. Và vì mọi thứ “dễ” hơn với nhà sản xuất servo, nên servo 28mm chất lượng bình thường thường rẻ (6–7–8$, hay quảng cáo 1.6kg), còn loại tốt hơn chỉ khoảng 15$–20$ (hay quảng cáo 6kg, 7kg torque).

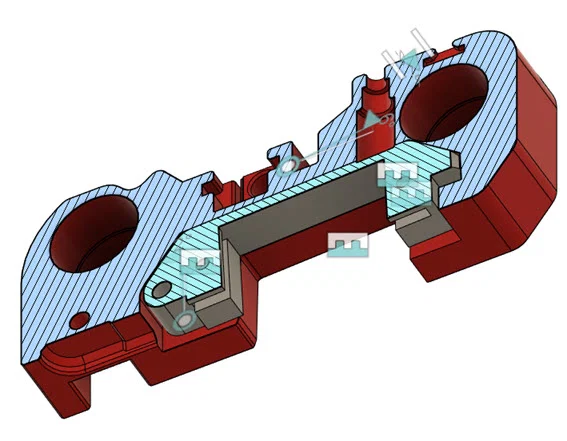
## Cân nhắc thiết kế
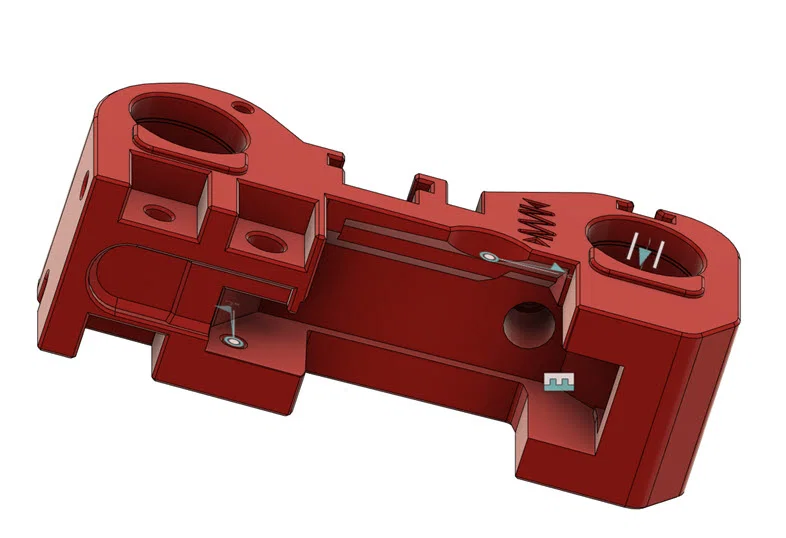
Mình phải làm thân selector dày thêm khoảng 1.5mm để kênh đi dây (wire management channel) hoạt động tốt hơn, và phần ruột bên trong đơn giản hơn.
Nếu nhìn vào ruột selector nguyên bản của ERCF v2, sẽ thấy có một cục gồ “lạ” ở bên hông để làm kênh dây. Cục này làm mọi thứ khó hơn nên mình bỏ phần gồ đó luôn.
Thân dày hơn thì selector cũng hơi cứng cáp hơn (hy vọng vậy).
Mình cũng gắn thử trên ERCF V1 và vẫn chạy.


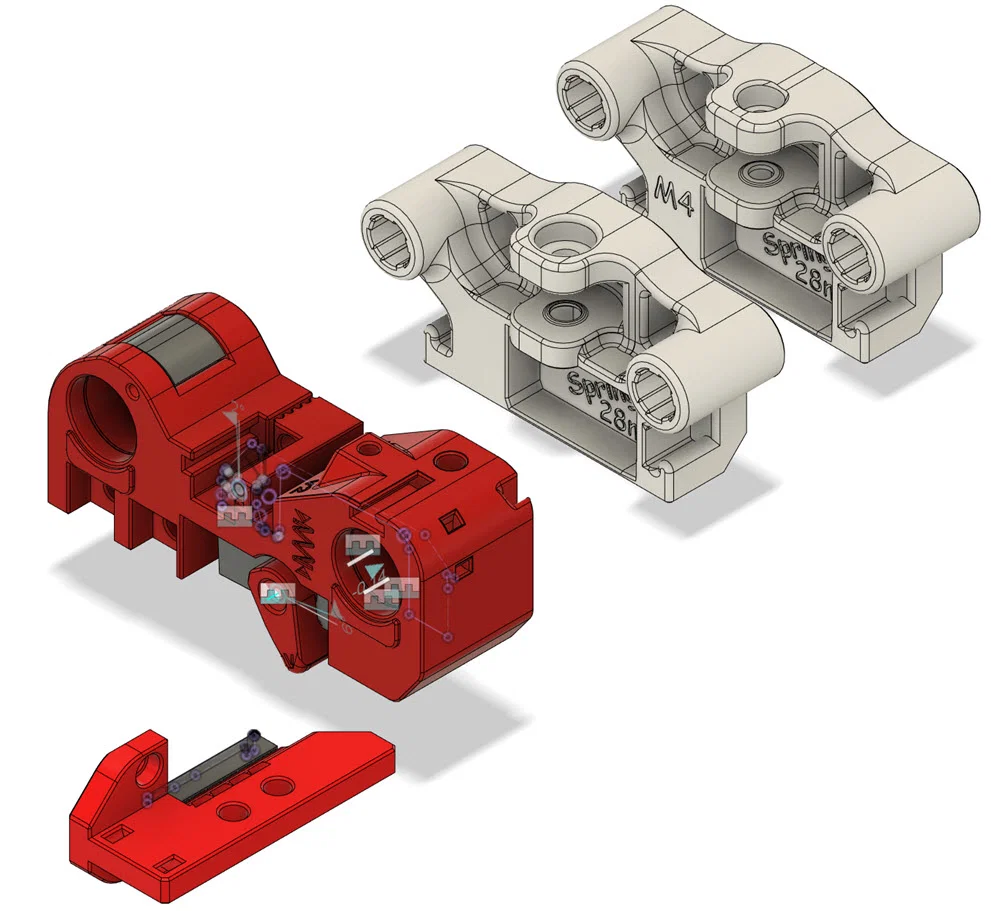
## Danh sách file
Tất cả file STL đã để đúng hướng in sẵn, mặt đáy quay xuống.
* servo_28mm_holder.stl ngàm/holder cho servo 28mm.
* a]_Selector_for_servo28mm.stl thân selector chính của ERCF.
* servo_arm_6mm_25T.stl servo 28mm thường có torque lớn hơn nên trục output đường kính 6mm thay vì 5mm như servo 23mm. Lưu ý mặt trên của lỗ không có răng, để dễ in; để răng quay lên phía trên nhìn có vẻ khó in.
* LinearAxisIdlerBlock.stl phần này cần lỗ/cắt rộng hơn chút để servo 28mm lọt vào được một chút.
* drag_Chain_Anchor_28mm_servo.stl vì thân selector to hơn, drag chain bản gốc che đường đi; cần khoét bớt một chút. File có support tích hợp, in xong gỡ ra.
* servo_hole_filler.stl X 2 servo 28mm thường có lỗ bắt lớn hơn, quá to so với vít taro 2mm của mình.
### File tuỳ chọn
* LinearAxisIdler_Block_M4.stl giống file trên, nhưng bản này dùng ốc idler M4 đầu button head và ê-cu/đai ốc, cùng M4 idler. Mình không có thêm ốc M5 và M5 idler để làm mod. Thường mình cũng không thích ốc M5; M4 tiện hơn nhiều mặt. Mình có sẵn nhiều ốc M4 và M4 idler. Bỏ qua nếu bạn không định dùng M4 screw/idler.
* erec_beat6_encoder_mount_for_thicker_selector_28mm để phần EREC filament cutter chạy được với thân selector mod (thân mới dày hơn bản gốc). Bỏ qua nếu bạn không dùng EREC filament cutter. ( ERCF_Filament_Cutter https://github.com/kevinakasam/ERCF\_Filament\_Cutter/tree/main )
### File nguồn CAD
Có cung cấp file STEP và Fusion360 F3Z.
### File Gcode test
ercf_selector_and_servo_test.gcode để home và chạy servo xuống/lên ở mọi vị trí selector.
Đổi tên file từ txt sang gcode để chạy; chỉ chạy sau khi lắp ráp xong, calibration xong và test tay (manual test) ok.
## Thiết lập in
* không cần support.
* cài đặt như thường cho Voron hoặc ERCF
* PETG ok. Mình không dùng ABS cho các phần không cần chịu nhiệt, nhưng ABS chắc cũng được.
## BOM
* vít taro M2.6 dài 8mm X 2 để bắt servo.
Trong túi phụ kiện của servo thường không có đúng loại vít này. Thường họ cho vít to hơn và dài hơn, không vừa thân selector của mình.
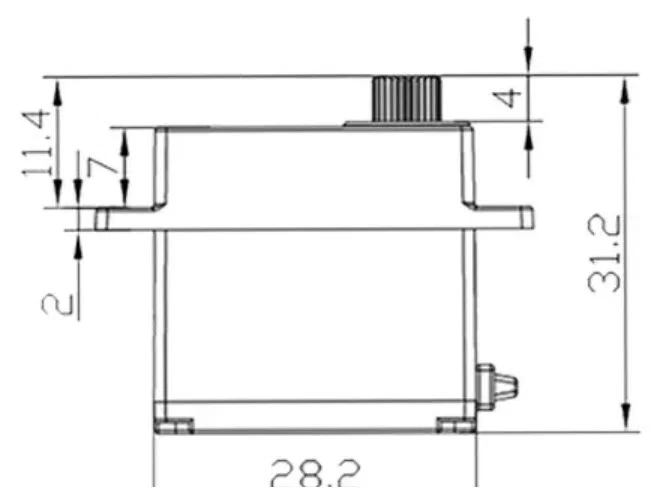
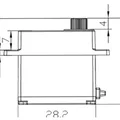
* 1 servo 28mm; 28mm là bề ngang thân chính, không tính phần tai bắt/mounting arm hoặc lỗ.
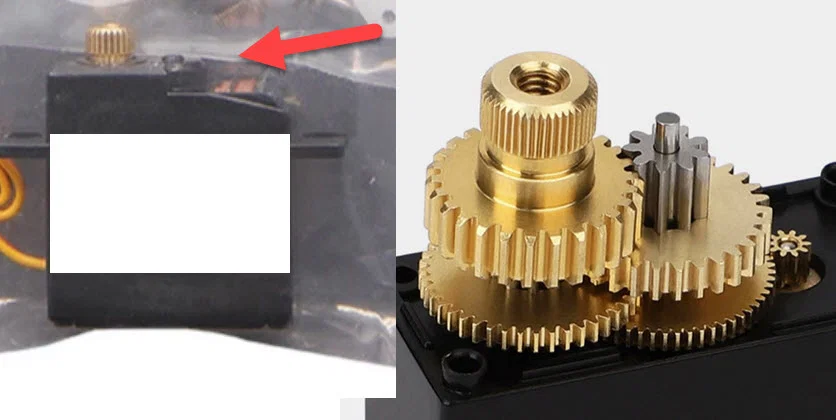
* không phải servo 28mm nào cũng giống nhau: có con mắc hơn, có con có bearing ở trục output, có con chỉ dùng vỏ nhựa làm “bearing”.
* Mình đoán: nếu phần nắp trên thân servo phẳng và kín, có thể nó có nhiều bánh răng hơn; nếu nắp trên chỉ dạng tròn, nó có ít bánh răng hơn (torque thấp, rẻ hơn). Mình khuyên mua loại nhiều bánh răng, nhưng thường sẽ mắc hơn chút. Tuỳ trải nghiệm mỗi người (YMMV).
* hình dưới: servo có nửa phần nắp trên, nghĩa là ít bánh răng hơn. Thường rẻ hơn, nhưng vẫn có thể đủ lực.

* hình dưới: servo có nắp trên phẳng kín, nghĩa là có thể nhiều bánh răng hơn (tốt hơn, torque hơn). Con này còn có bearing nữa thì càng ngon. Vậy con này đáng ra sẽ tốt hơn.

* cũng có thể nhìn càng bắt servo (servo mounting arm): càng dày có thể nghĩa là torque hơn. Mình thấy có loại dày 1.6mm, 1.8mm và 2mm.
## Các bước lắp ráp
### Phần selector
* in xong rồi gỡ support tích hợp trong selector, có 3 cái.
* gắn servo_hole_filler X 2 vào 2 lỗ bắt servo. Servo 28mm thường có lỗ bắt lớn hơn (đường kính 4mm), nhưng mình dự tính dùng vít taro 2.6mm. Lắp servo vào servo holder, nhớ đúng chiều.
* Cứ làm theo tài liệu ERCF V2. Không có bước mới/đặc biệt nào thêm.
* chưa lắp servo arm vội.
* cắm dây servo. Chú ý thứ tự chân của đầu nối BTT MMB là 5V, GND, Signal; nhưng nhiều dây servo lại là GND, 5V, Signal (khác nhau). Đừng cắm nhầm kẻo cháy servo hoặc tệ hơn.
### drag_Chain_Anchor_28mm_servo
* gỡ support tích hợp và làm theo tài liệu ERCF V2.
### Mẹo lắp servo arm:
* khuyên là đừng lắp servo arm cho tới khi mọi thứ khác sẵn sàng.
* khi mọi thứ ok, chạy lệnh ERCF_TEST_SERVO VALUE=20 trong command window để servo về 20 độ. Như vậy mình còn dư góc để giảm thêm nếu cần cho vị trí servo up.
* lắp servo arm ở vị trí UP, siết ốc trên arm (ốc máy ngắn 2mm trong túi phụ kiện servo), kiểm tra servo arm nằm rất sát thân servo.
* Đừng set góc quá nhỏ hoặc quá lớn làm servo arm không thể tới được (bị chặn vật lý bởi top hat). Servo sẽ cố ráng tới vị trí đó, motor nóng lên nhiều và cháy/hư rất nhanh.
* Chạy ERCF_TEST_SERVO VALUE=50, quan sát; rồi 60, 70... quan sát tiếp. Tìm ra góc để servo arm đè đúng vào top hat của filament block.
* Tuỳ mỗi bộ (YMMV), nhưng góc up/down của mình khoảng 73 độ.
* sau khi set góc servo up và down trong file tham số ERCF, restart firmware để có hiệu lực.
* chạy ercf_servo_up, và nhìn servo arm KHÔNG được chạm vào thân servo. Nếu chạm, có thể nó đang cố tới một vị trí bất khả thi và sẽ hư servo. Sờ/kiểm tra nhiệt độ thân servo trong 1–2–3 phút, không được nóng. Nếu servo arm muốn chạm vào thân, tăng góc up thêm 1–2 độ rồi test lại.
* chạy servo down và để yên, kiểm tra nhiệt độ thân servo trong 1–2–3–4–5 phút, không được nóng. Nếu servo arm cố tới vị trí bất khả thi, giảm góc 1–2 độ rồi test lại. Nó không nên “lạnh hơn ấm”. Nóng là không chấp nhận.
* servo càng mạnh thì càng dễ hư nếu set sai, nên phải cẩn thận. Góc servo phải chuẩn.
* Nếu có thể, dùng lab DC power supply để đo dòng servo khi ở vị trí UP và Down: dòng không nên lớn hơn 100mA. Nếu cao hơn, nghĩa là servo đang cố chạy tới vị trí không tới được—cần chỉnh lại góc. Nếu không có nguồn lab hoặc ngại đấu dây, cứ cảm nhận nhiệt thân servo.
### chỉnh lại toàn bộ setting vị trí của filament block trong file tham số ERCF.
Thân selector mới dày hơn bản gốc ERCF V2 khoảng 1.5mm, nên mình lo là giá trị trong file cần đổi tương ứng và test lại.
> colorselector: 1.8, 26.0, 48.6, 71.6, 95.0 , 118.0, 141.0, 164.2
### xử lý sự cố khi servo arm đè xuống bị lỗi
Nếu servo arm không đè xuống đúng, kiểm tra các điểm sau:
* khi đè xuống, servo arm không được chạm vào top hat khác; nó chỉ nên đè top hat của filament block đang được chọn. Nếu chạm top hat kế bên thì bị cấn, cần set đúng giá trị vị trí selector filament.
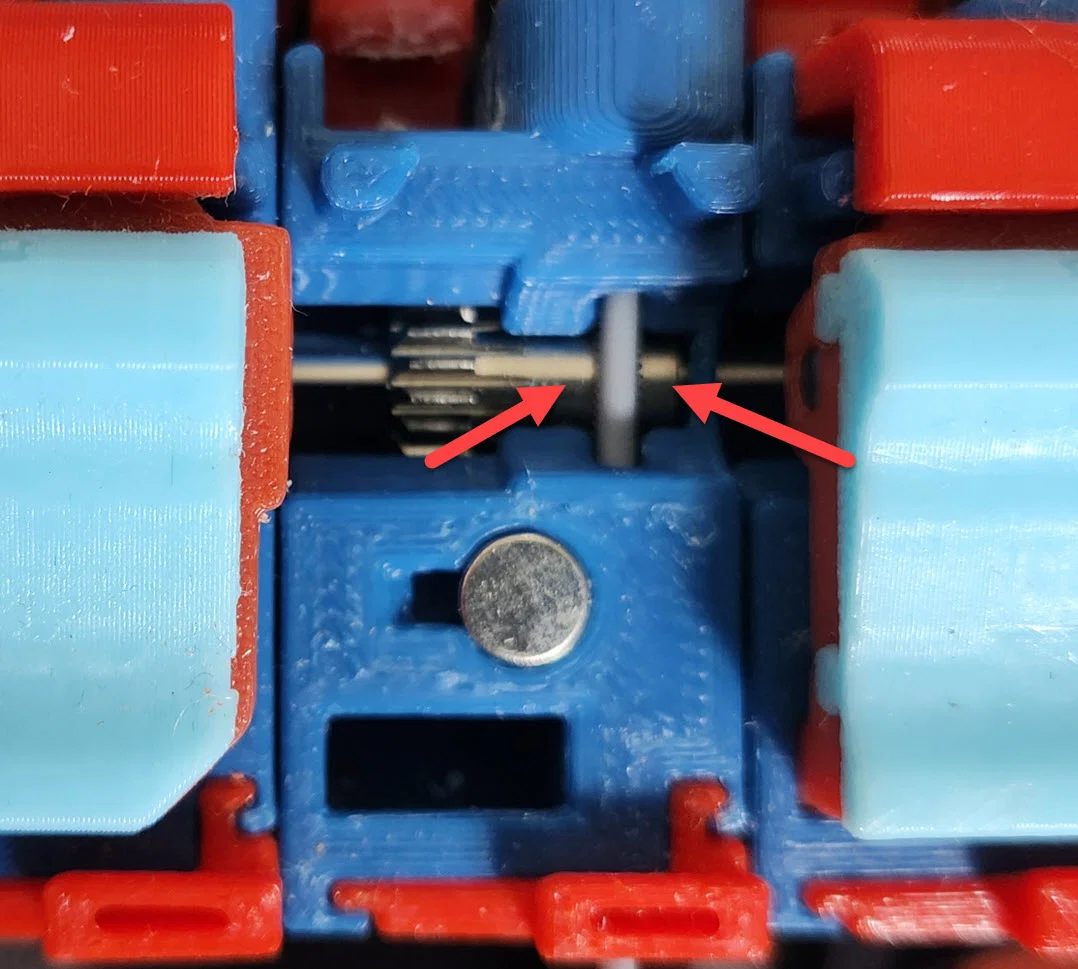
* nạp một đoạn filament vào trong filament block, kiểm tra filament nằm đúng giữa răng bondtech gear (đúng vị trí).
Nếu không đúng, filament sẽ bị cao hơn, nên servo arm và top hat không đè xuống được. Xem ERCF V2 manual trang 69.
* Trong hình dưới filament bị lệch hơi về trái, nên cần nới ốc chặn (set screw) của bondtech gear rồi dịch gear qua phải chút. Có thể giữ filament và ấn xuống để canh gear. Có thể dùng thread locker loại yếu (222, màu tím...) dạng lỏng. Không khuyến nghị dùng loại lực vừa (medium strength).
ercf V1 filament block được minh hoạ, nhưng ý tưởng giống nhau


* nếu bề mặt tiếp xúc của servo arm quá nhám, có thể dùng dũa/giấy nhám chà nhẹ cho mịn, để nó trượt trên bề mặt top hat dễ hơn.
* không có cải tiến nào khác (kể cả đổi servo 30mm/40mm siêu mạnh) có ý nghĩa nếu các vấn đề phía trên còn tồn tại.
selector gắn servo 28mm trên ERCF V1

selector gắn servo 28mm trên ERCF V2

### các nâng cấp tuỳ chọn khác
Nếu cần, có thể cân nhắc các nâng cấp sau để servo chạy ngon hơn:
* bôi silicone grease lên tất cả top hat nếu cần, để servo arm trượt dễ trên bề mặt top hat.
* dùng một DC-DC buck converter rời để hạ từ nguồn chính 24V xuống 6V (6.5V? 7V? tuỳ bộ/YMMV) cho servo, chịu được 2A hoặc 3A+; nếu rành điện thì cân nhắc thêm tụ lớn để nguồn ra mạnh và ổn định. Lợi ích: giảm tải cho mainboard BTT MMB khỏi “stress” do servo, và nếu có gì sai thì BTT MMB không bị cháy. Và dĩ nhiên, cấp 6V hay 7V thì servo sẽ cho torque lớn hơn.
* mod EREC filament cutter có thể dùng chung buck converter ở trên. (ERCF_Filament_Cutter https://github.com/kevinakasam/ERCF\_Filament\_Cutter/tree/main)
Giấy phép
File mô hình








Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!