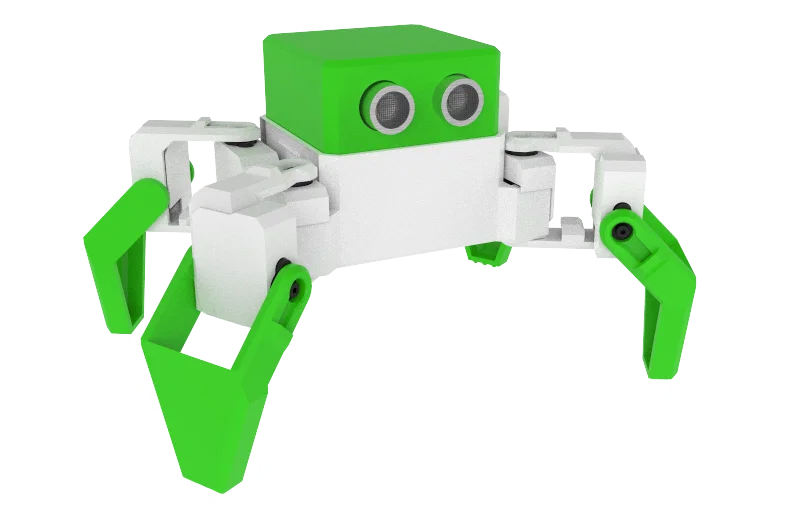
Otto DIY Quadruped robot – Robot 4 chân DIY

Otto DIY Quadruped robot là sự kết hợp thú vị giữa Otto và MiniKame, giúp robot di chuyển linh hoạt hơn với 8 servo và pin LiPo nhỏ. Có hướng dẫn, in FDM PLA không cần support/raft.

Mô tả
Quad được lấy cảm hứng từ #OttoDIY mà ai cũng biết ;) còn MiniKame là một robot quadruped nhỏ dựa trên module WiFi ESP8266. Nó dùng 8 servo (mỗi chân 2 servo) và một pin LiPo nhỏ.
Tính năng
- 👩💻 Lập trình đơn giản với Otto Blockly hoặc Arduino
- 📃 Có kèm sổ tay hướng dẫn
- 👣 Đi bộ & nhảy múa
- 🔊 Tạo âm thanh cảm xúc và giai điệu
Hướng dẫn in
Khuyến nghị dùng máy in 3D FDM với vật liệu PLA.
Không cần supports hay rafts.
Độ phân giải: 0.3mm hoặc 0.2mm để đẹp hơn
Fill density: 15%
Danh sách linh kiện
- 🖥 Vi điều khiển Otto Nano + I/O board
- 🔌 Cáp Micro USB
- 🔋 Pin sạc
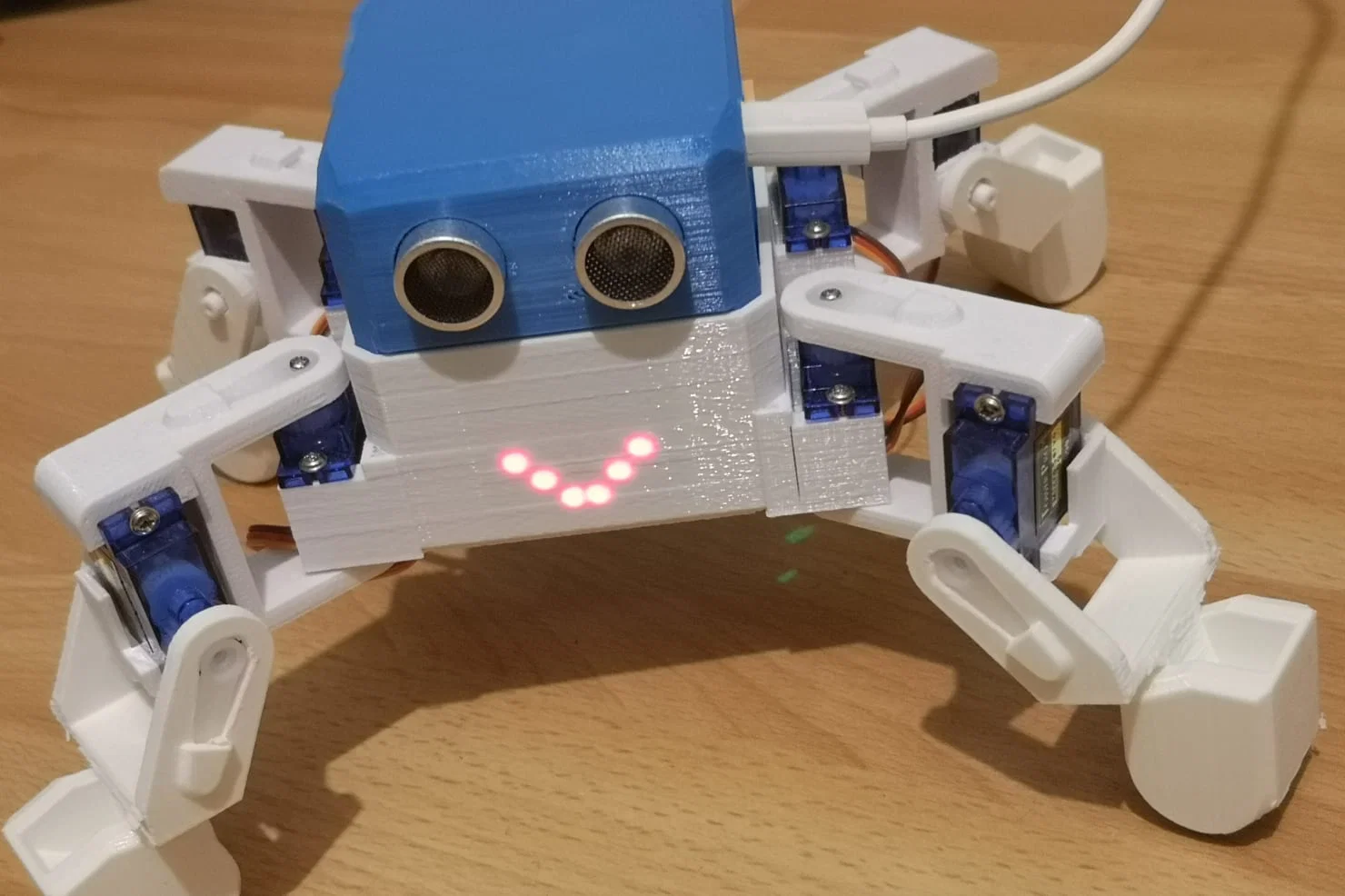
- ⚙ 8 x micro servo motors kèm bộ ốc vít
- 🔊 Buzzer
- 🌈 16 x cáp DuPont
- Tua vít Phillips
- Đầu in 3D (chọn ultrasound hoặc led matrix)
- Thân in 3D
- Chân in 3D
- Bàn chân in 3D

Bọn mình đã đầu tư rất nhiều thời gian và nguồn lực để cung cấp code, software và hardware dạng open source. Bạn vui lòng ủng hộ dự án bằng cách thả ❤ Like và chia sẻ; và bạn cũng rất hoan nghênh tham gia vào cộng đồng thân thiện của những người làm robot, giáo viên và maker. Tham gia ngay cộng đồng Otto Builder
Giấy phép

File mô hình










Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!