Thông tin giấy phép hệ thống chuyển động giường 1P Z
Hệ thống chuyển động 1p Z cho máy in 3D. Giấy phép nguồn mở được tổ chức bởi Sunnyvale Investments Group. Liên hệ với điện thoại…



Mô tả
Hệ thống chuyển động Z 1P cho máy in 3D.
Giấy phép mã nguồn mở thuộc về Sunnyvale Investments Group.
Số điện thoại liên hệ +64 275 985 266**
Lĩnh vực phát minh
Phát minh hiện tại liên quan đến thiết bị và phương pháp (hệ thống) để nâng hoặc hạ một bề mặt in trong máy in 3D. Người nắm giữ giấy phép cho hệ thống này là Liam Venter.
Mục tiêu của phát minh
Hệ thống chuyển động Z 1P hoặc Hệ thống chuyển động Z Nguyên tắc Đầu tiên là một hệ thống chuyển động Z mới độc đáo, cung cấp khả năng tự động cân bằng bề mặt mà không có hiện tượng băng hoặc hiện tượng không mong muốn nào trong quá trình in.
Bối cảnh hoạt động của việc nâng/hạ bề mặt/giàn trong máy in 3D
Một bề mặt hoàn toàn không bị ràng buộc sẽ có 6 bậc tự do như sau:
- Xoay quanh trục X (pitch)
- Xoay quanh trục Y (roll)
- Xoay quanh trục Z (yaw)
- Di chuyển theo hướng X
- Di chuyển theo hướng Y
- Di chuyển theo hướng Z
Một máy in 3D với bề mặt di chuyển cần tối thiểu 1 bậc tự do, chuyển động theo hướng Z.
Một máy in 3D với bề mặt tự cân bằng cần tối thiểu 3 bậc tự do.
- Di chuyển theo hướng Z
- Xoay quanh trục X (pitch)
- Xoay quanh trục Y (roll)
Nghệ thuật nền tảng:
Các phương pháp hiện tại để thực hiện điều này có những thiếu sót cơ bản do mối quan hệ giữa các yếu tố nâng.
Di chuyển của bề mặt theo hướng Z.
- Điều này thường được thực hiện trong các máy in thương mại hiện tại sử dụng giường cantilever. Trong cách sắp xếp này, giường được gắn vào một thành phần nâng được điều khiển bởi một vít dẫn hoặc vít bi. Một hướng dẫn tham chiếu được cung cấp với một hoặc nhiều thanh trượt mượt hoặc đường ray tuyến tính. Một ví dụ về điều này là hệ thống nâng giường được sử dụng trong các máy in Markforged. Hệ thống này không cho phép căn chỉnh giường tự động.
- Cộng đồng Mã nguồn Mở cũng đã phát triển các hệ thống sử dụng 2 hoặc nhiều cơ chế nâng/hạ giường được tham chiếu lẫn nhau bởi một giá đỡ cố định dưới giường. Một ví dụ về điều này là hệ thống nâng giường được sử dụng trong máy in Voron Trident. Những hệ thống này không cho phép căn chỉnh giường tự động trừ khi một thành phần linh hoạt được giới thiệu giữa các cơ chế nâng giường và giường.
- Cộng đồng Mã nguồn Mở cũng đã phát triển các hệ thống sử dụng 3 hoặc nhiều cơ chế nâng gần như độc lập. Một ví dụ về điều này là hệ thống nâng giường được sử dụng trong máy in Rat Rig. Những hệ thống này cho phép căn chỉnh giường tự động nhưng các cơ chế nâng không được tham chiếu trực tiếp với nhau. Những thiết kế này sử dụng một hướng dẫn tuyến tính đơn cho mỗi ba cơ chế nâng Z.
Những thiết kế này có hai vấn đề chính.
i) Các đường ray tuyến tính chỉ được tham chiếu lỏng lẻo với nhau (do được gắn trên các phần khung dọc riêng biệt mà không bao giờ có thể hoàn toàn thẳng hàng với nhau). Do đó, để ngăn chặn việc kẹt, những thiết kế này yêu cầu một khoảng trống giữa các đường ray tuyến tính và các bánh xe mà các cánh tay giường được gắn vào.
ii) Do cần một số khoảng trống giữa các ray và các bánh xe như đã mô tả ở i) ở trên, những thiết kế này cho phép một số xoay nhỏ không mong muốn xung quanh trục Z (yaw) và/hoặc chuyển động nhỏ không mong muốn theo các hướng X và Y do sự chơi giữa các đường ray tuyến tính và các bánh xe tương ứng mà các cánh tay nâng giường được gắn vào.
Lĩnh vực phát minh:
Phát minh hiện tại liên quan đến các thiết bị và phương pháp như sau:
Các tuyên bố cho hệ thống 1P Z như sau.
Hệ thống chuyển động Z 1P Z hoặc Hệ thống Z Nguyên tắc Đầu tiên là một hệ thống chuyển động Z độc đáo và mới lạ, cung cấp khả năng tự động căn chỉnh giường mà không có hiện tượng băng vít hoặc các hiện tượng không mong muốn trong quá trình in.
Điều này đạt được bằng cách giới hạn tự do của các bậc chuyển động chỉ còn ba bậc tối thiểu cần thiết cho hệ thống nâng/hạ và căn chỉnh giường tự động như sau:
- Chuyển động theo hướng Z
- Xoay quanh trục X (pitch)
- Xoay quanh trục Y (roll)
Trong khi hạn chế tất cả các bậc tự do khác.
Mô tả phát minh
Cốt lõi của hệ thống 1P Z là ba hệ thống chuyển động tuyến tính Z độc lập để cho phép căn chỉnh giường tự động quanh trục X và Y và chuyển động thẳng đứng theo hướng Z.
Để đạt được điều này, ba cơ chế chính là cần thiết:
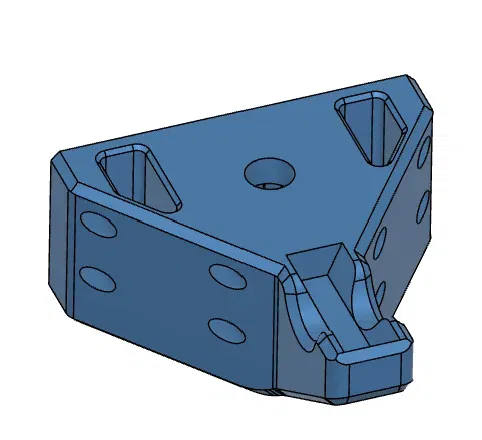
Cơ chế Chính Một.
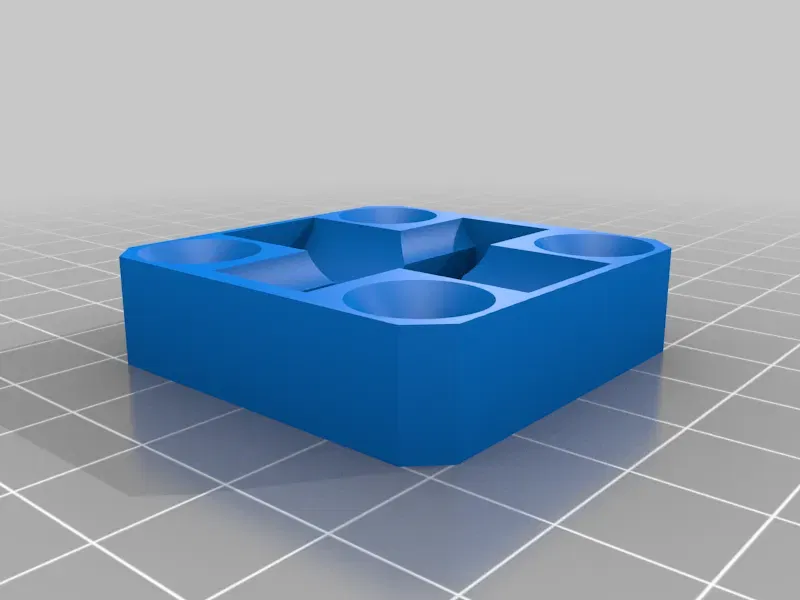
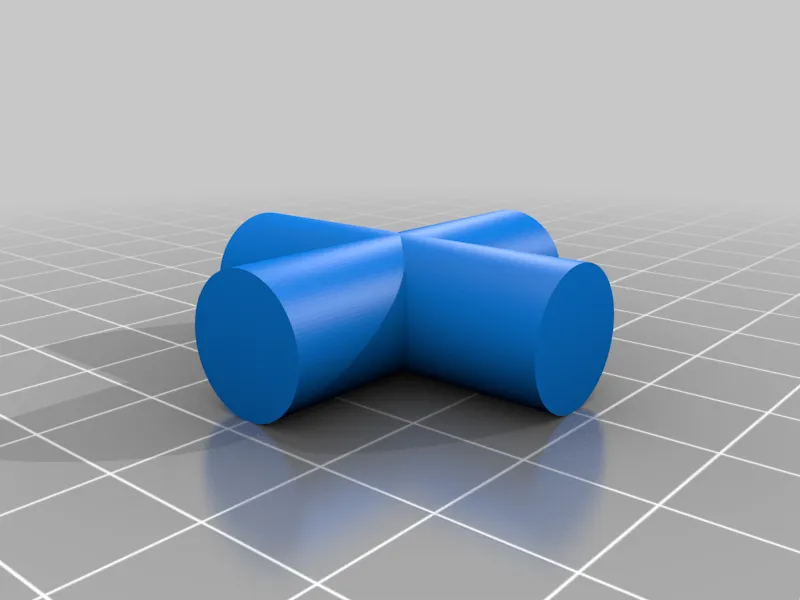
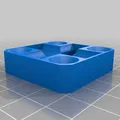
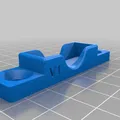
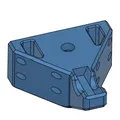
Trên một trong ba hệ thống chuyển động tuyến tính Z, hệ thống 1P Z sử dụng một trục xoay V-block hai trục độc đáo, giới hạn chuyển động của giường di động hoặc cổng chỉ còn hai bậc tự do, đó là xoay quanh trục X (pitch) và xoay quanh trục Y (roll). Có nhiều cơ chế khác nhau có thể đạt được điều này.
Một ví dụ về cơ chế để thực hiện điều này có thể là một chốt cuộn hai trục resting trong các V-block được đặt ở góc 90 độ với nhau.
Cơ chế cụ thể để cho phép điều này không hoạt động với hai cơ chế chính còn lại được bảo vệ bởi giấy phép GPL này, nhưng một cơ chế cụ thể được bảo vệ bởi quyền sở hữu trí tuệ khác của người nắm giữ giấy phép này.
Cơ chế này nằm giữa một trong các cơ chế nâng (vít dẫn, vít bi, hệ thống chuyển động tuyến tính hoặc băng tải) và bề mặt của giường của máy in 3D. Nó có thể có nhiều thiết kế khác nhau để phù hợp với bao bì yêu cầu. Để cung cấp một hiểu biết chức năng về cơ chế này, các thành phần của một thiết kế có thể như vậy được minh họa để cho thấy chức năng của nó.
Cơ chế Chính Hai.
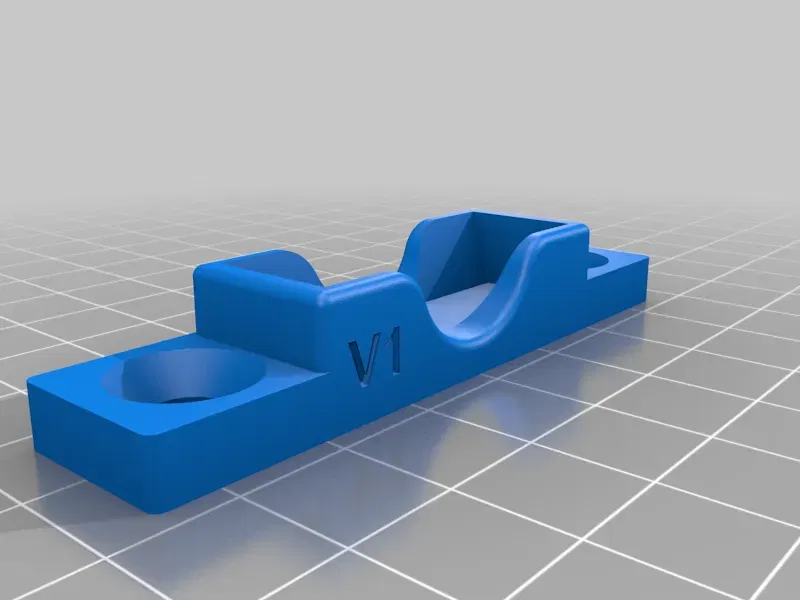
Tích hợp vào hệ thống 1P Z là một hệ thống chuyển động tuyến tính Z tham chiếu đơn liên quan đến cùng một hệ thống chuyển động tuyến tính như Cơ chế Chính Một. Mục đích của nó là cung cấp một tham chiếu được giữ chặt để nâng và hạ giường. Nó bao gồm một hoặc nhiều ray tuyến tính thẳng đứng, thanh trượt mượt mà hoặc hệ thống chuyển động tuyến tính.
Một ví dụ về cơ chế để đạt được điều này có thể là một ray tuyến tính rộng, hai ray tuyến tính hoặc hai thanh trượt mượt mà dẫn dắt một thiết bị được nâng lên bằng dây đai, trục vít hoặc trục vít bi.
Các cơ chế cụ thể để đạt được điều này không được quy định trong giấy phép này, nhưng có thể được bảo vệ bởi các quyền sở hữu trí tuệ khác.
Cơ chế Chính Ba.
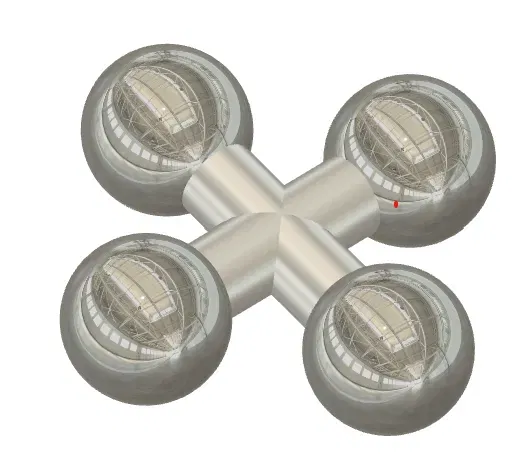
Hệ thống 1P Z cũng sử dụng một hoặc nhiều cơ chế liên quan đến hai hệ thống chuyển động Z tuyến tính khác để nâng và hạ giường mà:
i) cho phép tự do di chuyển (hoặc đủ dung sai di chuyển) của giường theo hướng X và Y để không có sự cản trở cơ học với hệ thống chuyển động tuyến tính Z tham chiếu đơn.
ii) không hạn chế sự quay của giường xung quanh trục X (pitch) hoặc quay quanh trục Y (roll).
Một ví dụ về cơ chế để đạt được i) và ii) ở trên có thể là các phụ kiện giường như các quả cầu hình cầu ngồi trên các ổ bi tuyến tính hoặc trượt trên các tấm.
Các cơ chế cụ thể để đạt được i) và ii) ở trên không được quy định trong giấy phép này, nhưng có thể được bảo vệ bởi các quyền sở hữu trí tuệ khác.
Hệ thống 1P Z có thể được lắp đặt thêm cho nhiều thiết kế máy in 3D hiện tại.
Danh mục: Các bộ phận máy in 3D
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — NoDerivativesCC-BY-NC-ND

File mô hình



Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!