Mô hình 3D WALL-E (robot animatronic dùng servo, STL)

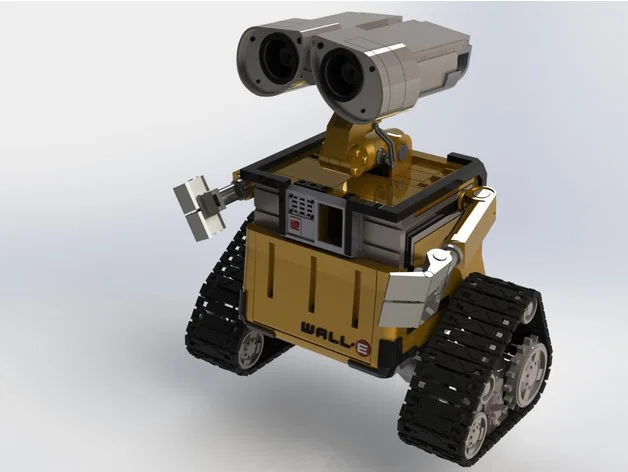
Bản sao WALL-E in 3D thiết kế từ đầu trong Solidworks, cho phép điều khiển 7 khớp bằng servo (tay, cổ, đầu, mắt), có thể gắn camera ở mắt và chạy bánh xích bằng 2 motor DC 12V. STL tính theo mm, scale ~41%.




Mô tả
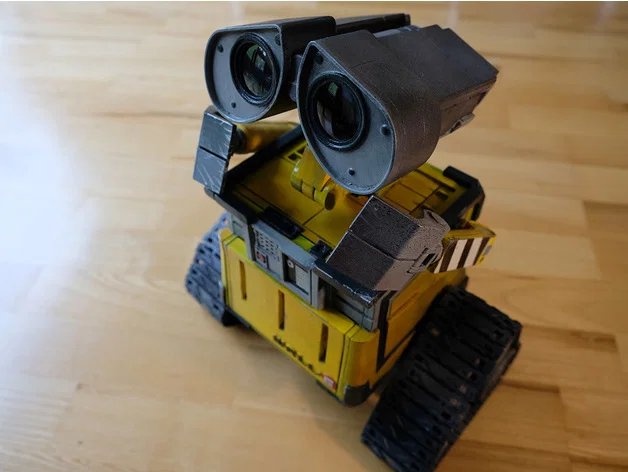
Ít có robot nào nhìn là nhận ra liền như WALL·E; ngoại hình dễ thương với cá tính rất riêng khiến ai thấy cũng quý ngay! Trong dự án này, mình thiết kế một bản sao WALL·E với mục tiêu là cho từng khớp của robot có thể cử động bằng tay hoặc dùng servo motors.
Lấy cảm hứng “lỏng lẻo” theo kích thước và thiết kế của bản Wall-E replica của ChaosCoreTech (https://www.thingiverse.com/thing:1681442), phiên bản này được dựng lại từ đầu trong Solidworks và cho phép điều khiển (actuate) 7 khớp, bao gồm tay, cổ, đầu và mắt. Thiết kế robot có các điểm nổi bật sau:
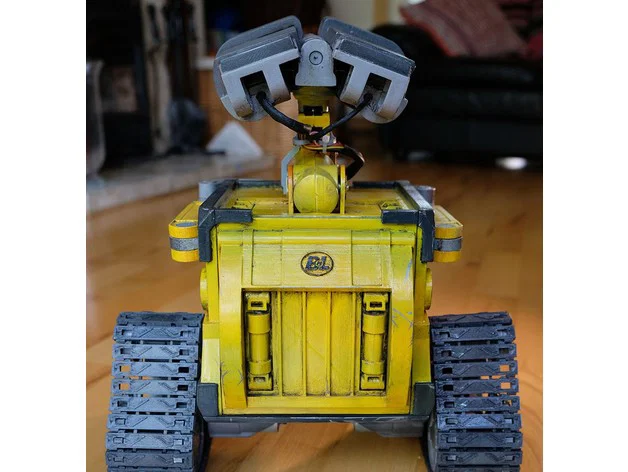
- Mỗi mắt có thể nâng lên/hạ xuống độc lập bằng servo motors.
- Có chỗ trong mỗi mắt để gắn thêm một camera nhỏ.
- Đầu có thể nhìn trái/phải bằng servo motor.
- Cổ được truyền động ở hai khớp, cho phép đầu nhìn lên/xuống và nâng/hạ.
- Mỗi tay có một motor ở vai để nâng/hạ.
- Tay gồm các khớp lắp kiểu pressure-fit, bàn tay và ngón tay, có thể tạo dáng thủ công.
- Bánh xích (skid steering) được 3D print hoàn toàn và có thể chạy bằng hai motor DC giảm tốc 12V.
Đây là một dự án khá “khủng”, hướng tới những ai muốn làm một con robot WALL·E animatronic đầy đủ với các khớp điều khiển bằng servo. Mình mất khoảng 3 tháng để thiết kế và lắp ráp, trong đó hơn 1 tháng chỉ để 3D print toàn bộ chi tiết. Tổng cộng có 310 parts (dù 210 trong số đó rất nhỏ và dùng để tạo bánh xích). Trong mục download kèm STL files có một file PDF liệt kê toàn bộ parts và số lượng mỗi part cần in.
Nếu bạn thấy đủ hứng thú để “cân” dự án này và in hết các file, nhớ cho mình biết tiến độ nha! Lưu ý: tất cả STL files đều tính theo millimetres. Thiết kế được scale khoảng 41% so với kích thước robot trong phim.
Mô tả chi tiết cách lắp ráp robot và hướng dẫn code có trên website của mình:
https://wired.chillibasket.com/3d-printed-wall-e/
Code dùng để lập trình robot và Raspberry Pi có trên GitHub. Nếu bạn gặp vấn đề hay có câu hỏi liên quan tới lập trình, vui lòng hỏi trên website của mình.
https://github.com/chillibasket/walle-replica
Video WALL·E robot của mình hoạt động đây:
https://www.youtube.com/watch?v=QidMAtTzF88
Post-Printing

Changelog
Update 1: (30th June 19) Upload lại tread-pin-x140.stl; file gốc export sai scale.
Update 2: (2nd July 19) Chỉnh neck-bottom-right.stl, body-bottom.stl, wheel-bracket-outer-left.stl và wheel-bracket-outer-right.stl để sửa lệch nhẹ vị trí lỗ bắt bolt.
Update 3: (6th July 19) Thêm wiring diagram và video hướng dẫn lắp ráp.
Update 4: (12th July 19) Upload lại body-back.stl vì bị thiếu một phần hình học của piston.
Update 5: (15th July 19) Thêm parts _neck-wire-guide-left.stl_and neck-wire-guide-right.stl.
Update 6: (24th September 19) Cập nhật neck-round-bottom.stl để lắp vừa servo motor lớn hơn như SG90.
Update 7: (29th October 19) Cập nhật parts list; kích thước lens cho mắt trước đó ghi nhỏ quá.
Update 8: (10th April 20) Cập nhật PDF parts list. Thêm file wheel-top-larger-x0.stl có thể dùng thay wheel-top-x8.stl nếu cần tăng độ căng của xích.
Update 9: (11th June 20) Chỉnh các file wheel-bracket để lắp vừa motor có tốc độ dưới 150RPM; file cũ không đủ chỗ cho gearbox dài hơn 24mm. Files: wheel-bracket-inner-left.stl, wheel-bracket-inner-right.stl, wheel-bracket-outer-left.stl, wheel-bracket-outer-right.stl.
Additional Hardware
Phần hardware và electronics cần để lắp robot gồm:
- (x14) M3 Bolt - dài 10mm [link]
- (x12) M3 Bolt - dài 20mm
- (x2) M3 Bolt - dài 6mm
- (x26) M3 Nut
- (x3) Kẹp giấy (paper clip) - dùng làm linkage
- (x7) High-torque micro servo motor (góc 180°) [link]
- (x2) Plano-convex lens: ⌀31.5 - 32.5mm - cho mắt
- (x2) 12V DC geared motor - ⌀37mm, 100-150RPM [link]
- (x1) Arduino Uno hoặc tương đương [link]
- (x1) Arduino Motor Shield R3 [link]
- (x1) 16-channel 12-bit PWM servo driver - PCA9685 [link]
- (x1) Bộ pin 12V DC (12V DC battery pack)
- (x1) 12V to 5V DC buck converter [link]
Với phần mắt, mình tháo từ một ống nhòm cũ để lấy lens; mình thấy phần phản chiếu và độ bóng trên lens làm bản sao nhìn “thật” hơn hẳn. Ngoài ra, có thể dùng Raspberry Pi để thêm tính năng, ví dụ cho robot phát âm thanh, dùng camera và điều khiển từ xa qua web interface:
- (x1) Raspberry Pi (nên lấy bản có WiFi tích hợp) [link]
- (x1) Loa nhỏ
- (x1) USB camera
(Ghi chú: các link chỉ để tham khảo; bạn nên tìm nhà cung cấp phù hợp và giá tốt ở gần khu vực của bạn!)
Print Settings
- Layer Height: 0.3mm
- Infill: 15%
- Supports: Yes - cho một số chi tiết
- Material: Grey PLA
(Tất cả STL files là hệ metric - kích thước tính theo millimeters)
- Mình dùng độ phân giải tương đối thô và infill thấp để tăng tốc thời gian in và giảm khối lượng chi tiết. Mấy micro servo-motors dùng để kéo các khớp không mạnh lắm, nên giảm khối lượng là bắt buộc.
- Mình in toàn bộ chi tiết trên heated glass bed, kèm brim 5mm để giảm cong vênh (warping). Một số chi tiết có overhang và cần supports.
- Nếu bạn định sơn robot, mình khuyên nên in màu xám kim loại (metallic grey) để nếu sơn bị tróc thì nhìn vẫn giống kim loại.
- Tolerance cho tất cả khe (slot) và các phần lắp nối với nhau là +-0.20mm.
- Tổng lượng filament cần khoảng 1.5kg (hai cuộn).
Assembly Instructions
Xem video để có hướng dẫn đầy đủ cách lắp ráp robot.
Wiring diagram được đưa ở phần post printing, minh hoạ cách nối từng linh kiện điện tử trong robot. Sau đó cổng USB của Arduino Uno được nối sang cổng USB của Raspberry Pi. Nếu bộ 12v to 5v DC buck converter có thể cấp tới 5 amps thì có thể cấp nguồn trực tiếp cho Raspberry Pi từ converter. Nếu không, nên dùng một bộ pin 5v riêng.
Giấy phép

File mô hình































































Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!