Reworked Mechanical Planetarium - Mô hình hành tinh cơ khí cải tiến

Phiên bản nâng cấp của mô hình hành tinh cơ khí với động cơ bước 12V cho lực kéo mạnh mẽ hơn. Đã được tối ưu hóa 16 chi tiết để dễ lắp ráp và in ấn hoàn hảo trên các máy in hiện đại.



Mô tả
Lần đầu mua chiếc Ender 3 v2, vợ tôi gửi cho cái link mô hình planetarium cơ khí này để đùa vui thôi. Ai ngờ tôi thử in thiệt và bị hụt hẫng vì không kiểm soát được dung sai khi lắp ráp. Thế là tôi bỏ bẵng nó một thời gian, cái mô hình làm dở dang trở thành vật chứng cho độ tệ của cái máy in hồi đó. Khoảng một năm sau, nhờ đồng nghiệp thuyết phục, tôi mua con Prusa MK4 và thật sự bất ngờ vì nó quá đỉnh so với con Ender 3. Tôi quay lại với dự án này và phát hiện ra Damada42 đã thêm động cơ bước vào. Tôi mua linh kiện điện tử về in, lần đầu chạy được nhưng chưa mượt. Thế là tôi cứ mò mẫm chỉnh sửa, tháo ra lắp vào không biết bao nhiêu lần. Cuối cùng tôi thay đổi đến 16 chi tiết trong phiên bản này. Sau khi in thành công 3 bộ, tôi quyết định chia sẻ bản remix này cho mọi người.
Một vài lưu ý khi in và lắp ráp:
- Hãy dùng chế độ Ironing cho các bề mặt tiếp xúc với bộ phận chuyển động, ví dụ như mặt trên của bánh răng trung gian hoặc các chi tiết xếp chồng lên trụ. Trong Prusa Slicer, chuột phải → Add Setting → Ironing. Chọn tất cả các ô và để “Topmost Surface Only”. Cách này hiệu quả cho hầu hết các chi tiết. Một số phần cần thêm modifier vào vùng cụ thể để iron riêng.
- Dùng dao gọt và giấy nhám mịn dán lên mặt kính (đảm bảo độ phẳng) để mài nhẵn bề mặt nếu được.
- Bôi trơn các bộ phận xoay. Tôi dùng một ít mỡ Super Lube vì có sẵn trong nhà.
- Chà nhám nhẹ trục truyền động chính.
- Dùng mũi khoan lớn hơn một chút để doa lại các lỗ.
Tôi in mô hình này bằng Prusa MK4 với tính năng Input Shaping, dùng cấu hình 0.20mm STRUCTURAL mặc định. Các thay đổi của tôi là:
- 3 perimeters.
- Chọn “Avoid crossing perimeters”.
Tôi in hầu hết bằng nhựa PLA, riêng file 28ByJ48_Axis thì khác. Do động cơ bước khá nóng nên tôi in đặc phần đó bằng nhựa PETG để tránh lỗi.
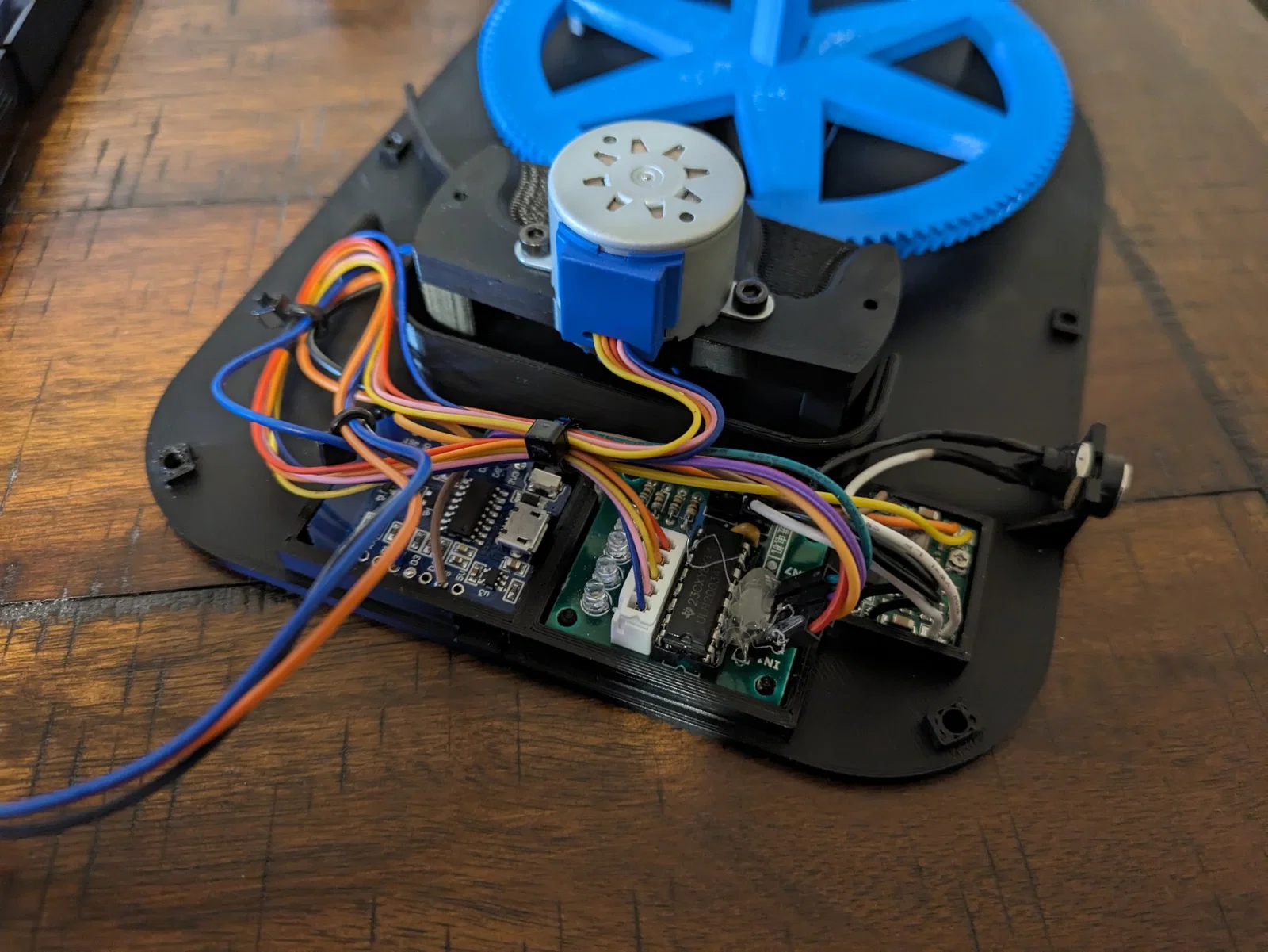
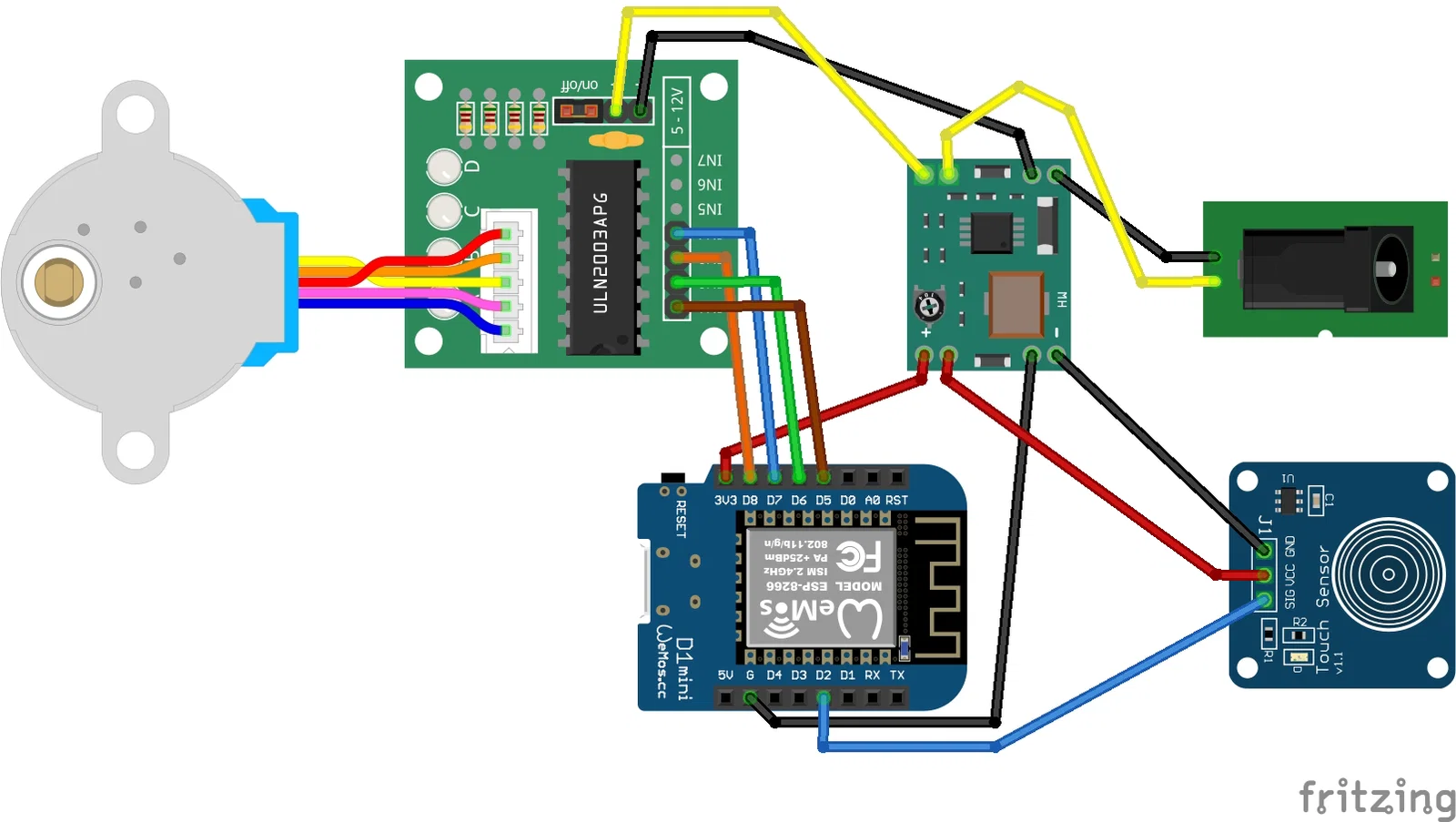
Phần điện tử:
Sau khi thấy động cơ bước 5V không đủ lực kéo, tôi nâng cấp lên 12V. Bạn cần một giắc nguồn 5.5x2.1mm và một bộ hạ áp (buck converter) để giảm xuống 3.3V. Bộ buck converter có một biến trở cần chỉnh để đầu ra đạt đúng 3.3V, bước này bắt buộc phải dùng đồng hồ đo điện (multimeter). Nút bấm hơi lỏng một chút, bạn chỉ cần chêm thêm một mẩu giấy gấp lại là xong. Keo nến (hot glue) rất hữu ích để cố định board ESP8266.
EDIT: Ban đầu tôi quên tải mã nguồn lên và cũng không tìm thấy file .ino của mình đâu. Hãy dùng file . Nhớ dùng Arduino IDE để chỉnh cài đặt Wifi/AP trước nhé. Làm theo hướng dẫn trên trang Amazon để setup IDE kết nối với board. Quan trọng nhất là phải cài driver đầy đủ:
CH340 Drivers cho Windows, Mac và Linux
Link này sẽ giúp các bạn đỡ tốn hàng giờ đồng hồ mò mẫm lỗi.
Để đáp ứng yêu cầu ESPAsyncWebServer.h, hãy cài đặt ESPAsyncHTTPUpdateServer của tác giả Mohammad Mahdi Nazari cùng với các dependencies đi kèm. Tính đến ngày 02/12/2024, mã này vẫn compile và upload bình thường.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình
















Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!