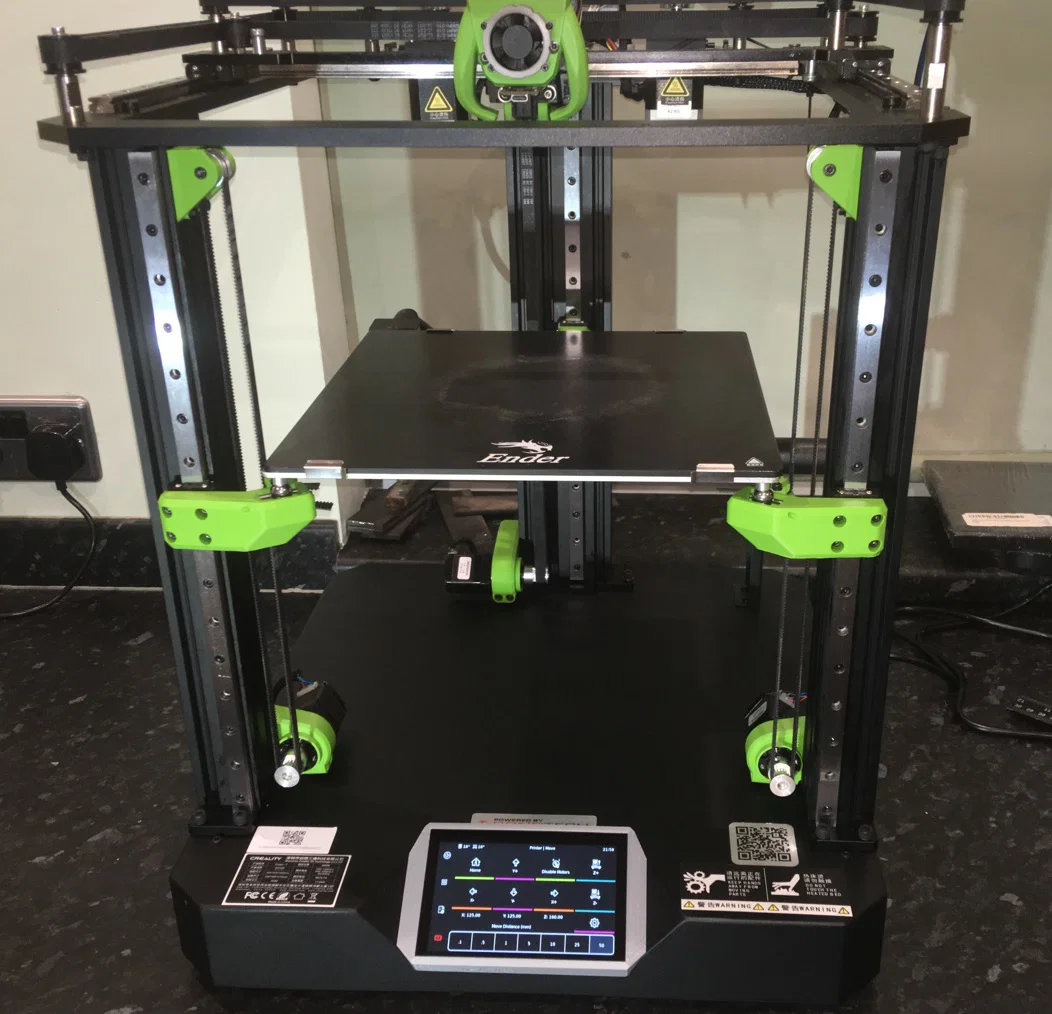
Nâng cấp trục Z 3 động cơ nghiêng cho Ender 7 & bàn in Kinematic
Dự án nâng cấp Ender 7 lên hệ thống trục Z 3 động cơ với tính năng nghiêng (Z-tilt) và bàn in Kinematic. Sử dụng truyền động dây đai thay vì trục vít me, kết hợp linh kiện chất lượng cao để tăng độ ổn định và chính xác.


















Mô tả
Cập nhật 01.04.24: Đã sửa đổi khung gắn động cơ bước, hiện là Rev2 (để tránh nứt vỡ).
Cập nhật 04.02.24: Đã tải lên các file Step.
Đây là dự án nâng cấp hệ thống trục Z nghiêng với 3 động cơ dành cho máy Ender 7 của tôi.
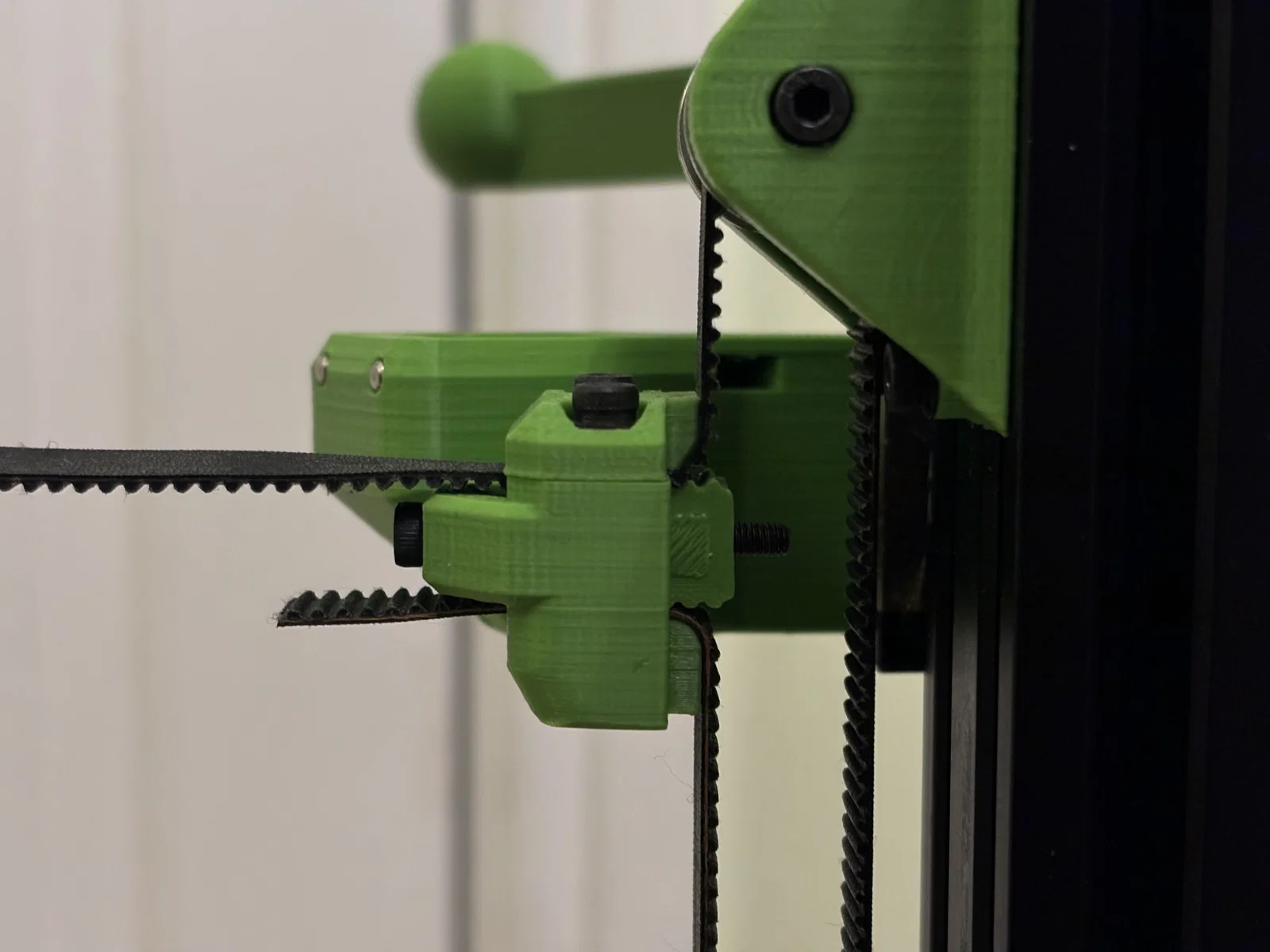
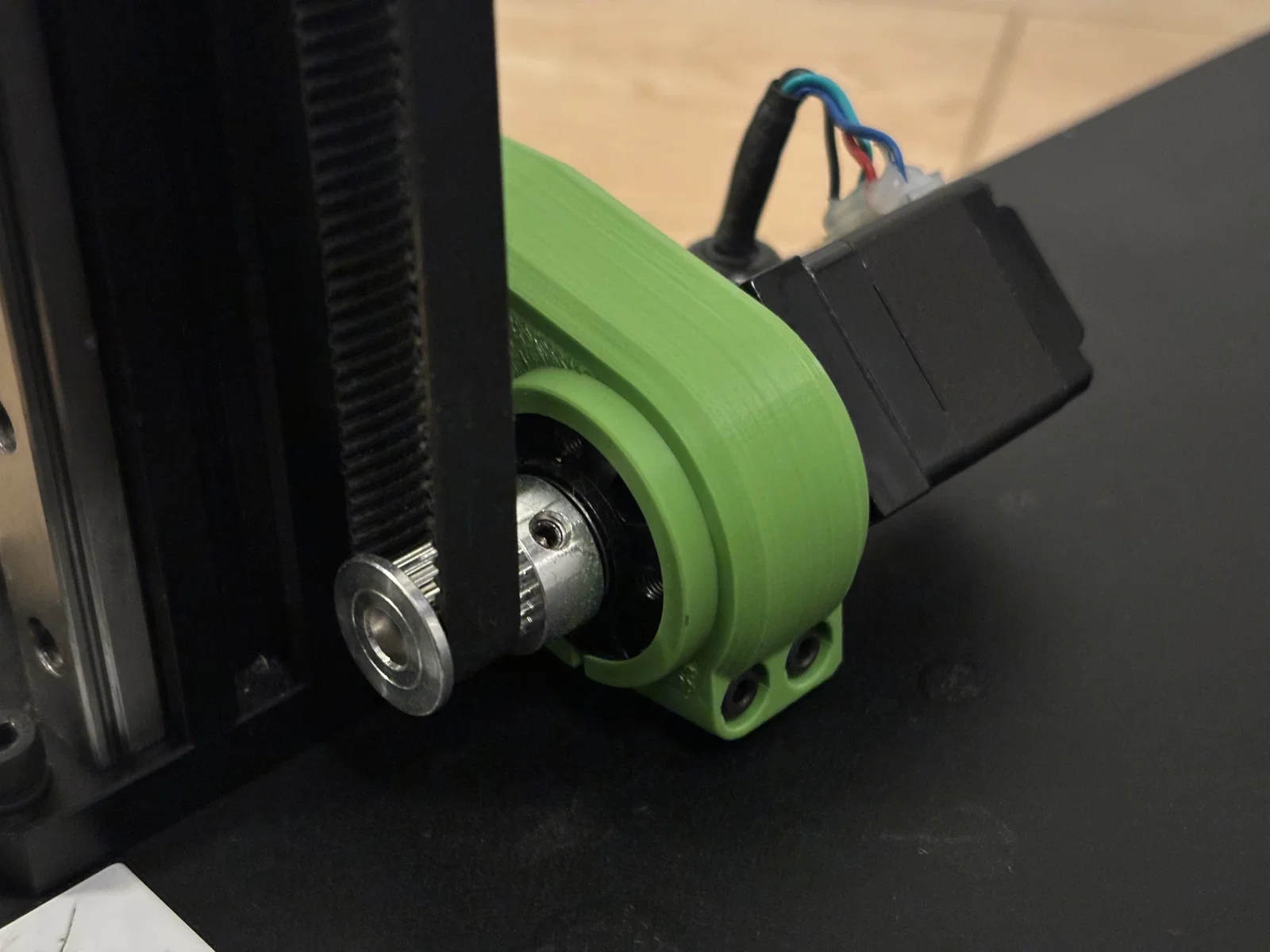
Thiết lập trục Z nghiêng (Z-tilt) này hơi khác biệt so với tiêu chuẩn vì sử dụng dây đai thay vì trục vít me. Nó dùng các động cơ bước có hộp giảm tốc để đạt độ phân giải bước cần thiết, 0.02mm mỗi bước đầy đủ, và có khả năng chịu tải trọng bàn in cộng thêm 1.5kg khi ngắt điện động cơ. Các động cơ bước thân vuông 28mm có hộp giảm tốc tỉ lệ 20:1, cùng loại được dùng trên máy in SecKit Cube. https://www.aliexpress.us/item/1005003837995982.html
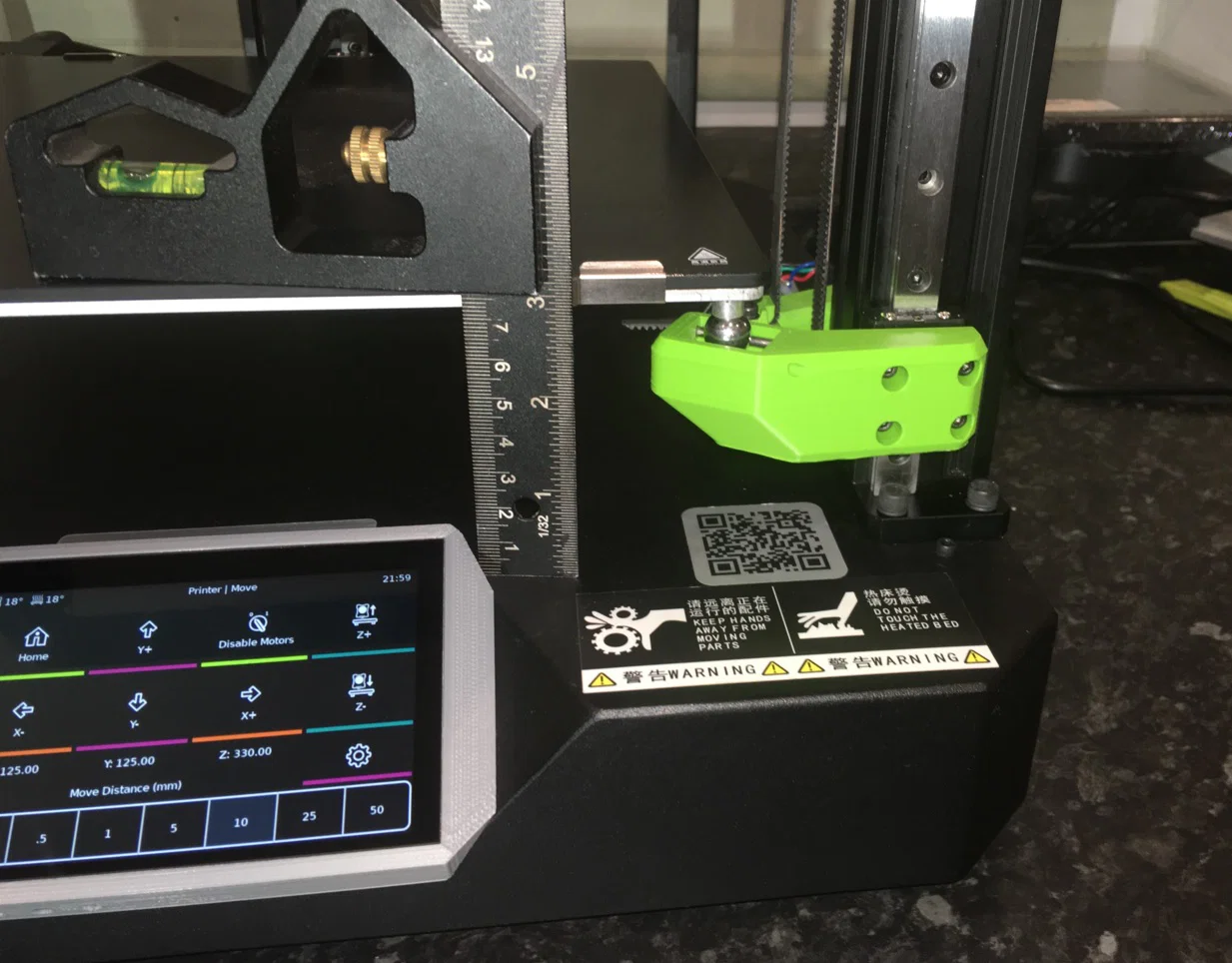
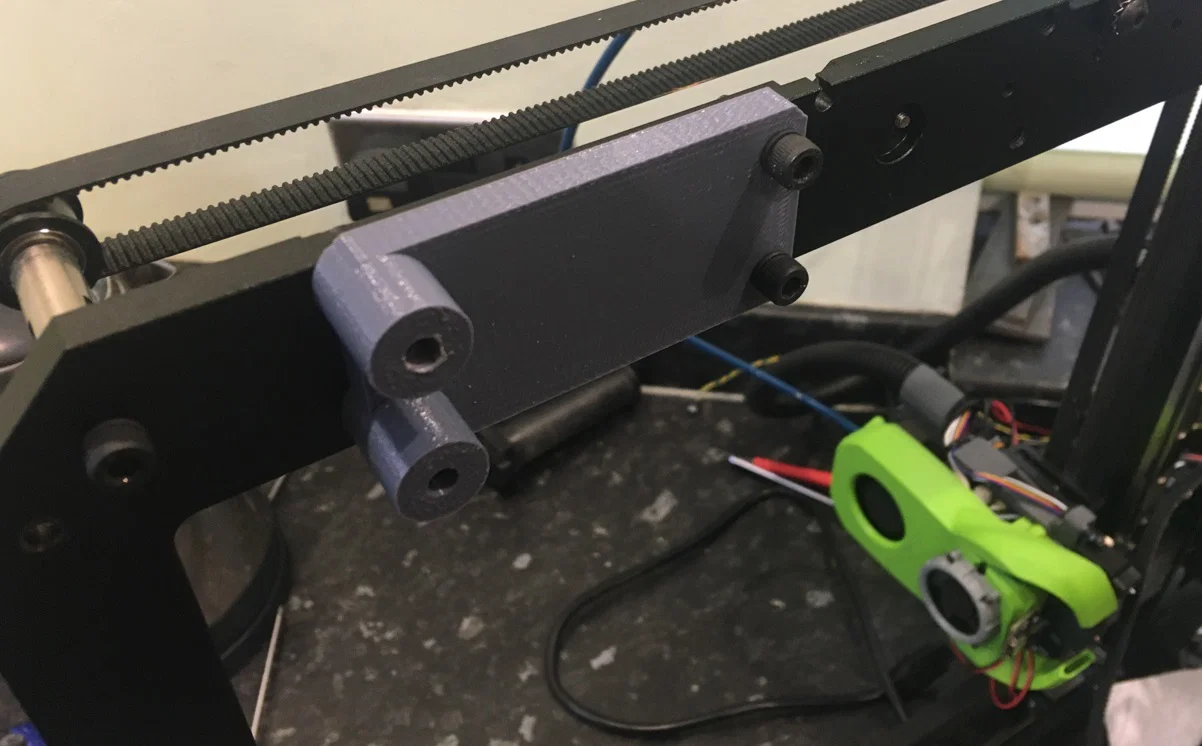
Phần gắn bàn in là dạng Kinematic, sử dụng linh kiện từ máy in RatRig. Do phần tử gia nhiệt nằm ở giữa phía sau nên tôi không thể gắn bi trực tiếp vào bàn, vì vậy tôi đã làm một thanh kẹp bằng nhôm để giữ cố định viên bi. Ở phía trước, tôi mở rộng các lỗ góc kẹp lên đường kính 5mm và khoét lỗ côn để sử dụng vít M5 đầu côn.
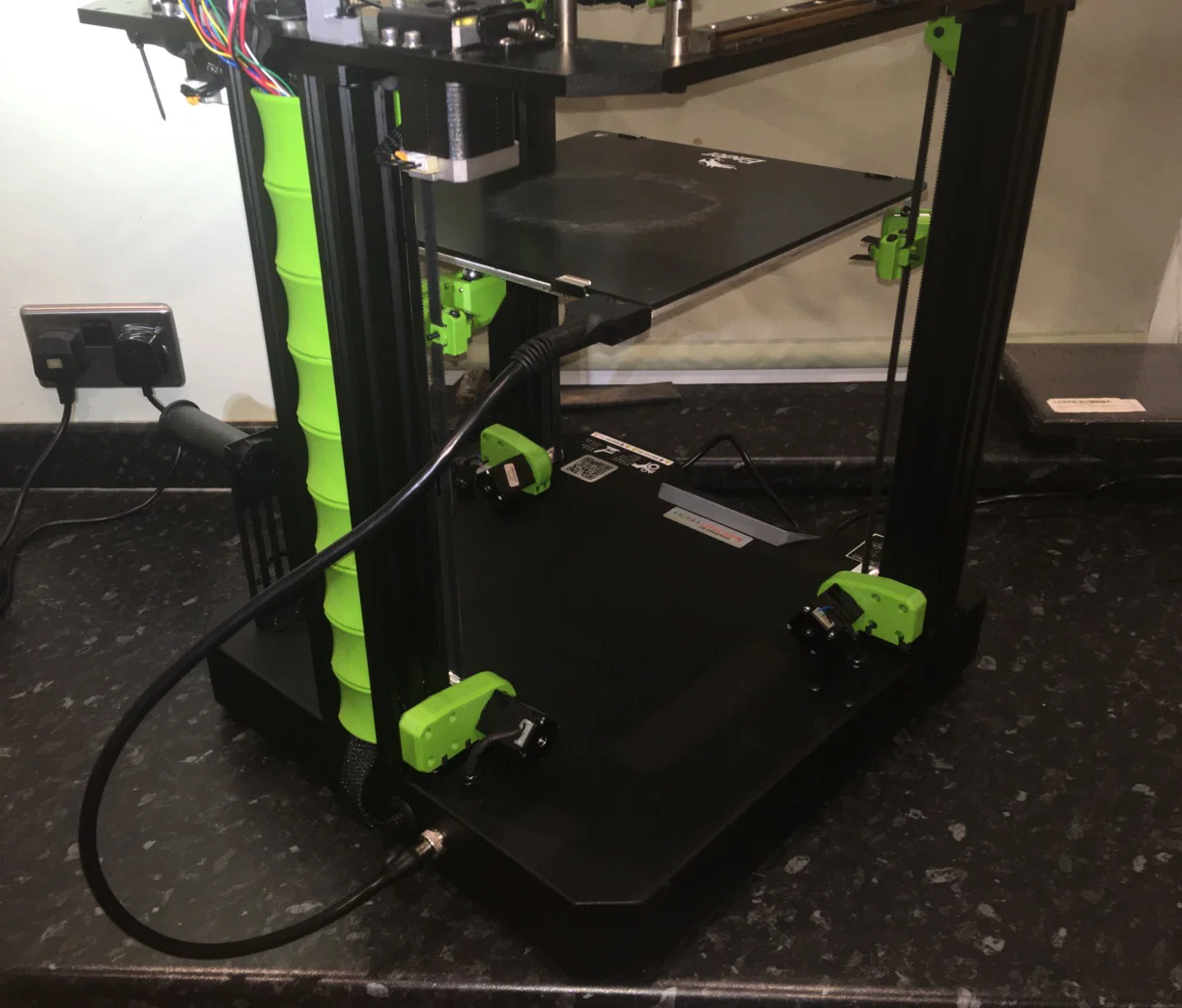
Các sửa đổi khung gồm xoay thanh nhôm định hình chữ C phía sau 180 độ để tạo mặt phẳng gắn tốt hơn cho khối puly trên cùng và thanh trượt, đồng thời dời các trụ nhôm phía trước về phía trước 70mm để thẳng hàng với cạnh trước của bàn in.
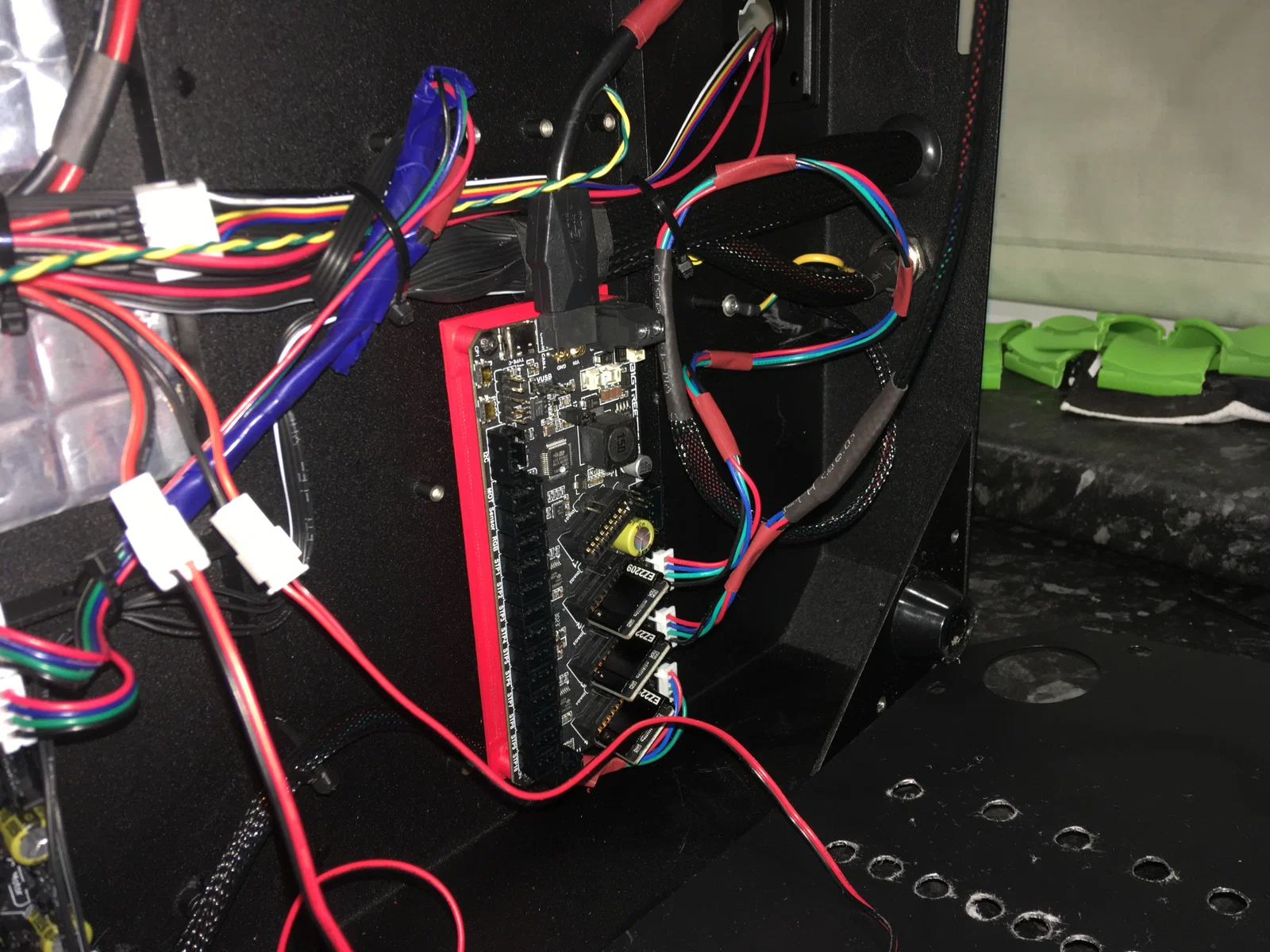
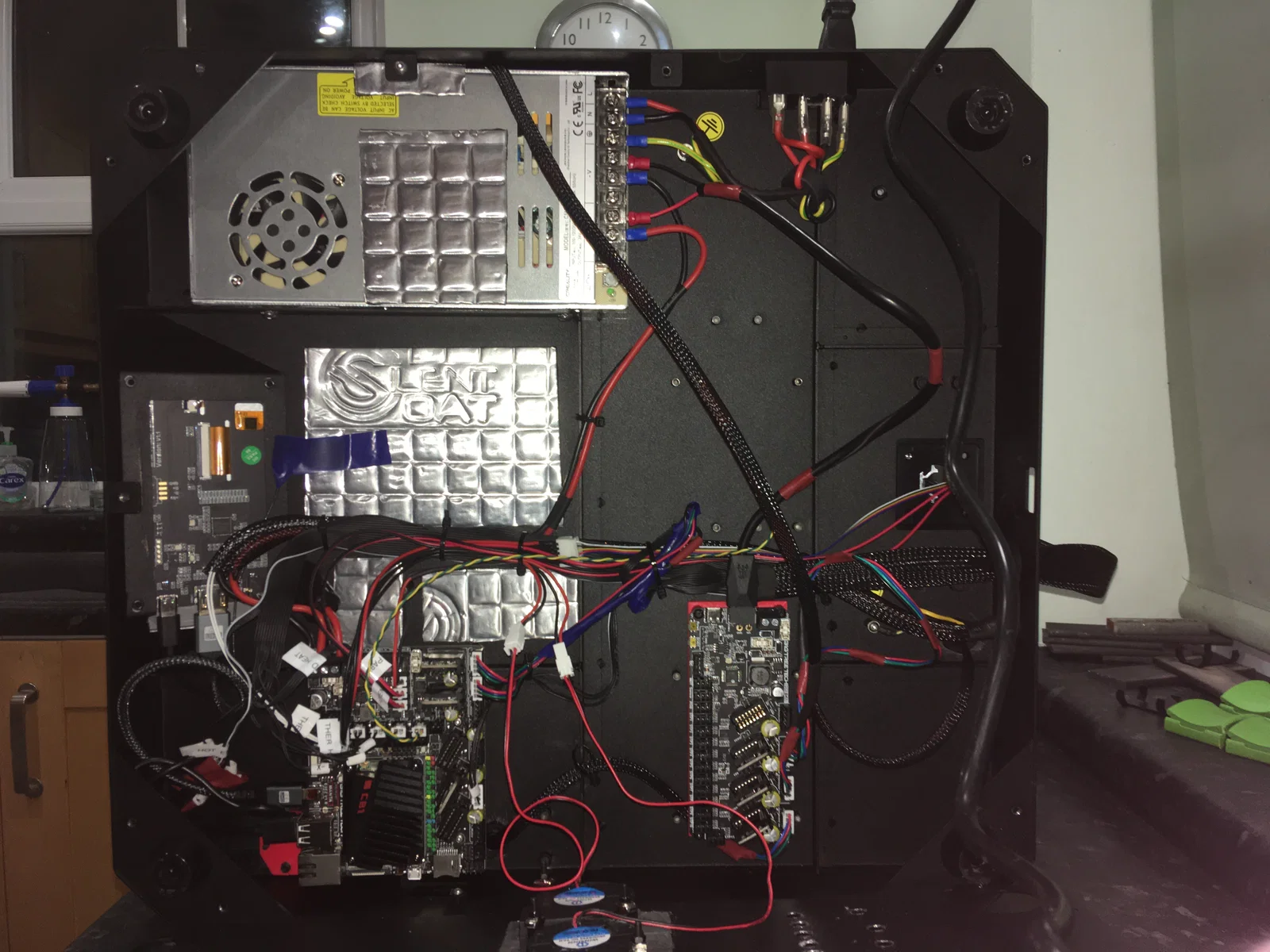
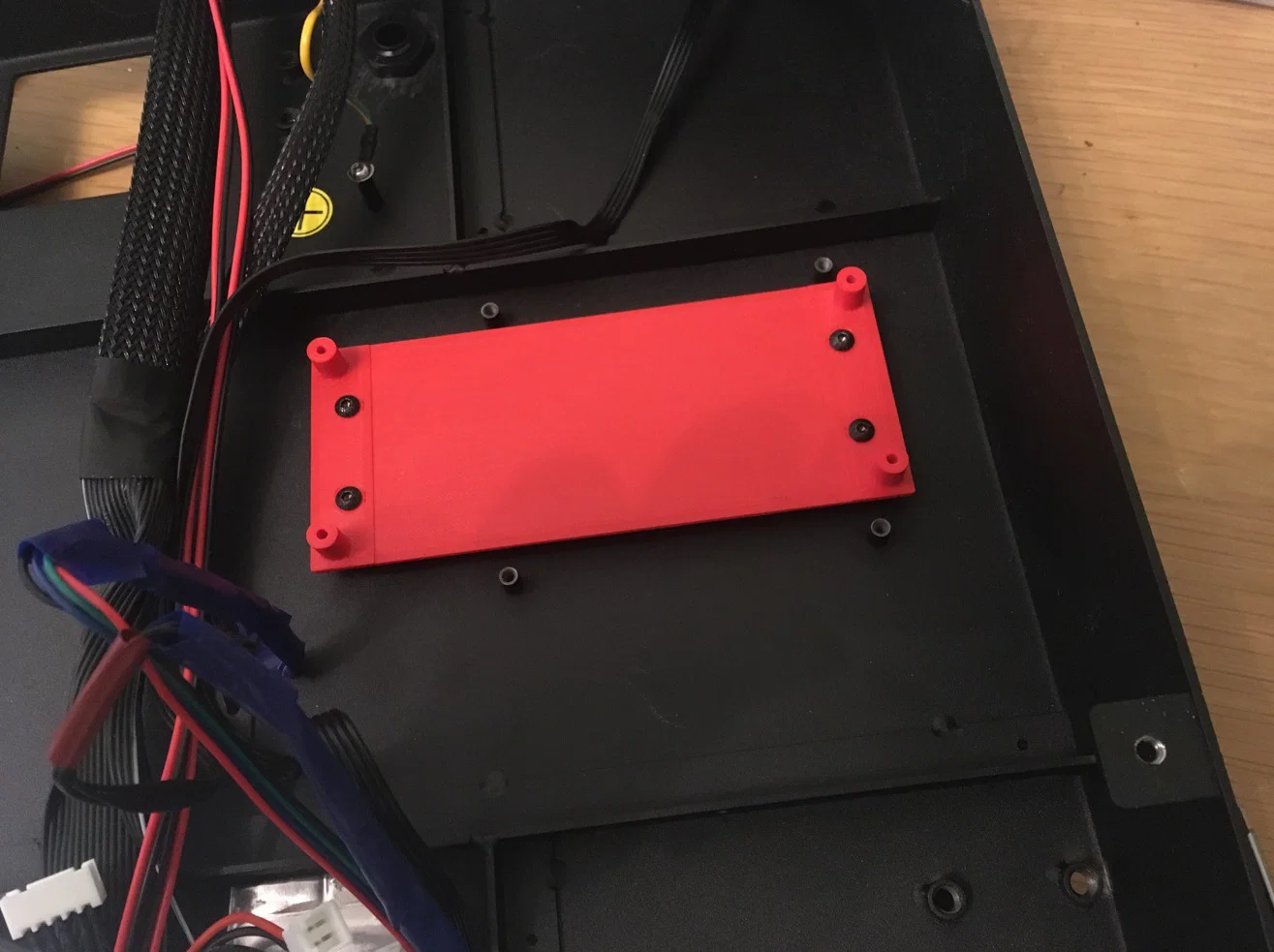
Bo mạch chủ Ender 7 tiêu chuẩn không phù hợp cho dự án này vì chỉ có 4 driver động cơ bước. Với trục Z ba động cơ, bạn cần thêm 2 driver nữa. Tôi đã nâng cấp bo mạch lên BTT Manta E3EZ (có 5 driver), sau đó lắp thêm bo mở rộng CanBus BigTreeTech MMC để có thêm 4 driver. Có rất nhiều loại bo mạch khác để lựa chọn, không nhất thiết phải giống setup của tôi. Đáng tiếc là phần này khiến dự án trở nên khá tốn kém.
Về chi phí: Dự trù khoảng £200 cho linh kiện trục Z, cộng với £130 cho bo mạch và driver.
Danh sách linh kiện dưới đây có thể chưa hoàn thiện và sẽ được cập nhật thêm.
Các bộ phận cần in:
- 1 Tay đòn nghiêng Z trái (LHS)
- 1 Tay đòn nghiêng Z phải (RHS)
- 1 Tay đòn nghiêng Z sau
- 1 Khung gắn động cơ nghiêng Z trái
- 1 Khung gắn động cơ nghiêng Z phải
- 1 Khung gắn động cơ nghiêng Z sau
- 2 Khối puly trên nghiêng Z (cạnh)
- 1 Khối puly trên nghiêng Z (sau)
- 3 Khối kéo căng dây đai
- 3 Kẹp nắp trên dây đai
- 9 Đoạn ốp che cáp
- 2 Chốt giữ đai ốc chân khung trước
- 1 Đồ gá khoan chân khung trước
- 1 Đồ gá khoan & taro chân khung trước
- 1 Đồ gá khoan kẹp bi sau
- 1 Khung gắn bo mạch BTT MMC – tùy chọn.
Các bộ phận cần mua:
- 3 Thanh trượt MGN12 400mm.
- 3 Con trượt MGN12C.
- 3 Puly răng 20T lỗ 3mm cho dây đai GT2 10mm.
- 3 Puly chủ động 20T lỗ 6mm cho dây đai GT2 10mm.
- 3 mét dây đai Gates GT2 rộng 9mm.
- 3 Động cơ bước Sumtor Nema 11 28mm x 33mm với hộp giảm tốc 20:1. Mã: 28HS3306A4-XG20.
- 1 Thanh nhôm 5mm x 15mm x 183mm.
- 6 Chốt thép không gỉ 35mm x 3mm.
- 3 Nam châm 20 x 10 x 5mm (hai lỗ).
- 3 Viên bi thép mạ kẽm đường kính 12mm có lỗ ren M5.
- 2 Đệm nhôm anode hóa đường kính trong 5mm x 6mm.
- 3 Ốc siết cáp M12.
- 1 mét ống lưới bọc cáp.
- Ống co nhiệt.
- 3 Đầu nối XH2.54 4-pin & chân cos.
- 1 Bo mạch chủ (cần tối thiểu 6 driver, chạy được Klipper).
Giấy phép

File mô hình
















Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!