Khám phá "507 Mechanical Movements" qua các mô hình in 3D

Bộ sưu tập các mô hình cơ học in 3D được lấy cảm hứng từ cuốn sách kinh điển "507 Mechanical Movements" năm 1868, giúp người học dễ dàng quan sát và tìm hiểu các nguyên lý truyền động cơ bản trong thực tế.















Mô tả
Spoiler: Tôi không phải là người tạo ra 507 mô hình này; tên gọi này dựa trên cuốn sách “507 Mechanical Movements” của Henry T. Brown xuất bản năm 1868. Cuốn sách này cũng có phiên bản trực tuyến kèm hoạt ảnh. Các bạn nhớ ghé xem nhé.
Những cuốn sách như thế này cực kỳ hữu ích để tìm cảm hứng cho các bài toán thiết kế. Nhưng tuyệt vời hơn cả hình ảnh chính là các mô hình cơ học cầm tay, nơi học sinh và sinh viên có thể trực tiếp thử nghiệm các cơ chế trong thực tế.
Các mô hình 3D này nắm bắt được cốt lõi của các chuyển động nguyên bản, cho phép khám phá tương tác và hiểu rõ các nguyên lý cơ học đằng sau chúng.

Tổng quan:
Số hiệu của các mô hình tương ứng với số thứ tự trong sách. Con số này cũng được dập nổi trên từng mô hình.
Phần màu vàng là bộ phận cần di chuyển. Trong một số trường hợp, các bộ phận khác cũng có thể được dịch chuyển.
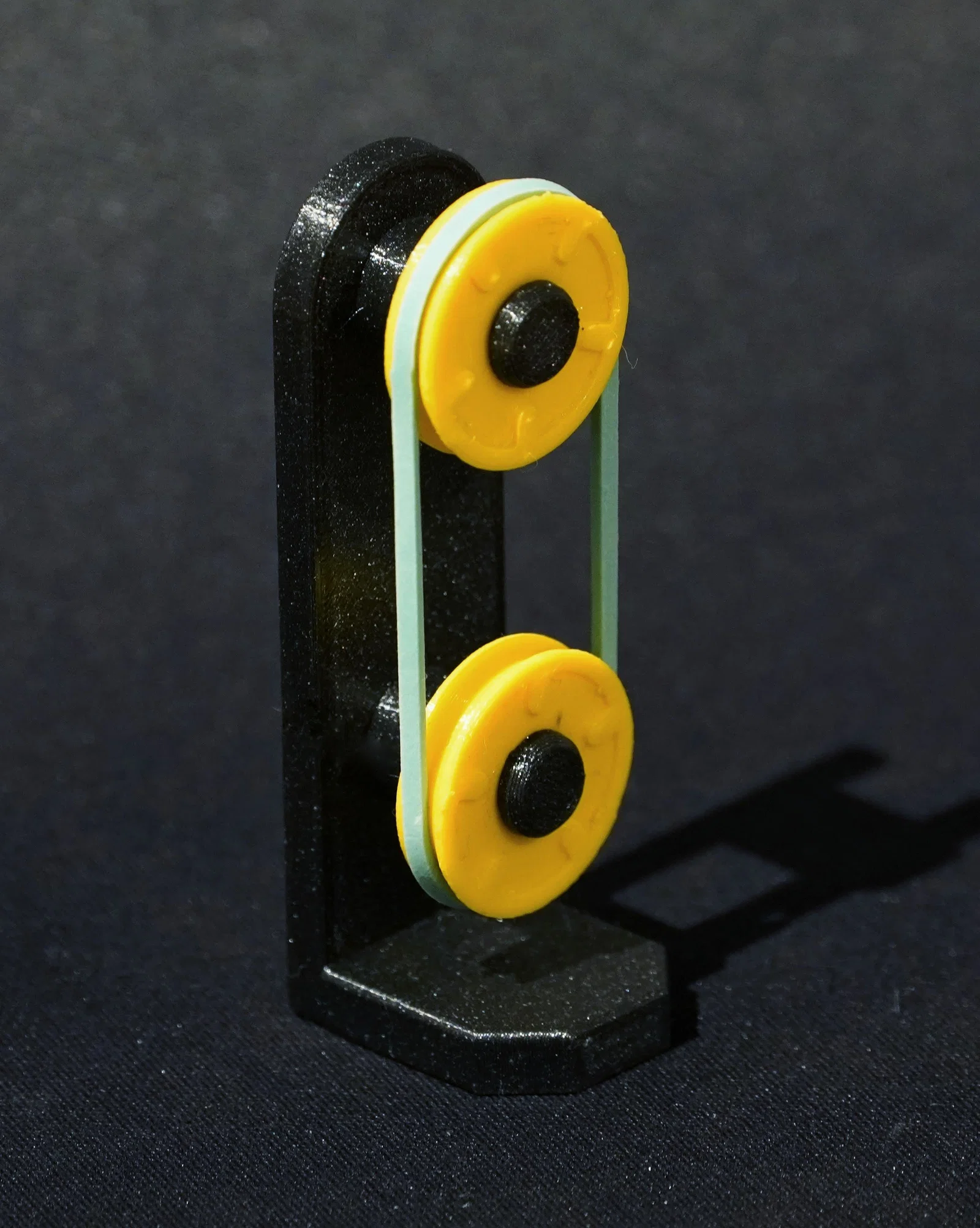
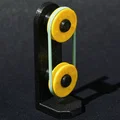
Số 1 & 2:
Mô tả:

Bộ truyền động đai cổ điển được ứng dụng trong nhiều lĩnh vực. Đai truyền động có nhiều dạng, bao gồm đai dẹt, đai tròn và loại phổ biến nhất là đai thang (V-belt). Các loại đai này thường có độ trượt nhất định, nghĩa là khi động cơ khởi động mạnh, đai có thể trượt nhẹ trên puly. Đặc điểm này cho phép khởi động êm ái hơn so với các giải pháp khác.
3D-Modell:
Trong mô hình này, tôi sử dụng một sợi dây thun làm dây đai. Đai cũng có thể lắp chéo để puly bị dẫn quay ngược chiều.
Bao gồm file mô hình và hai chốt (rivet).
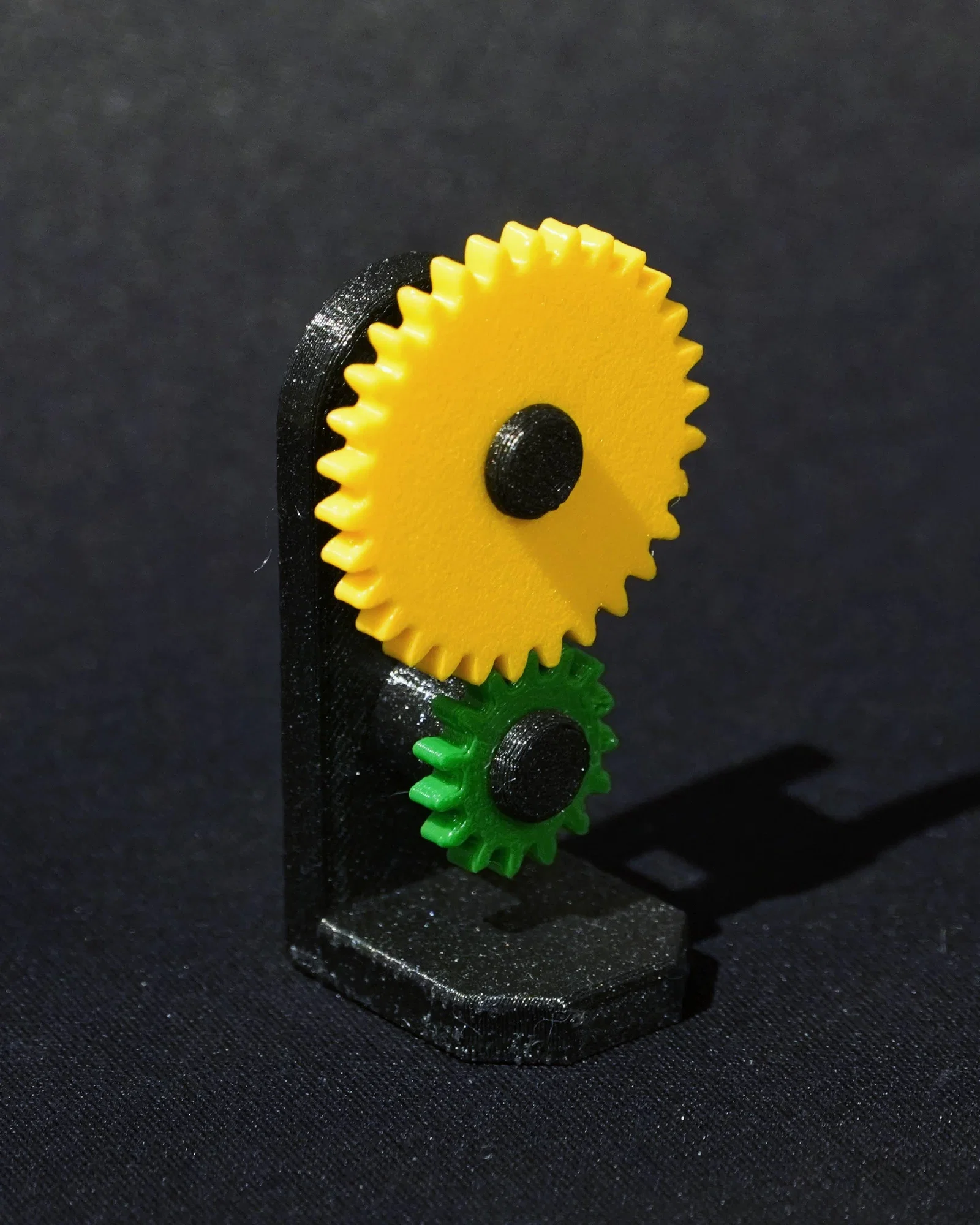
Số 24:
Mô tả:

Bánh răng mang lại độ chính xác cao khi truyền động. Khi thiết kế, cần lưu ý chỉ các bánh răng có cùng kích thước răng mới có thể khớp với nhau. Kích thước này gọi là module. Đường kính vòng chia rất quan trọng để xác định khoảng cách giữa các bánh răng. Kích thước bánh răng khác nhau tạo ra tỷ số truyền, làm thay đổi tốc độ giữa đầu vào và đầu ra. Hình dạng răng cũng rất thú vị, gọi là biên dạng thân khai (involute), giúp các răng lăn êm trên nhau.
3D-Modell:
Các bánh răng trong mô hình có 30 và 15 răng. Điều này có nghĩa là bánh răng nhỏ sẽ quay nhanh gấp đôi bánh lớn.
Bao gồm file mô hình và hai chốt.
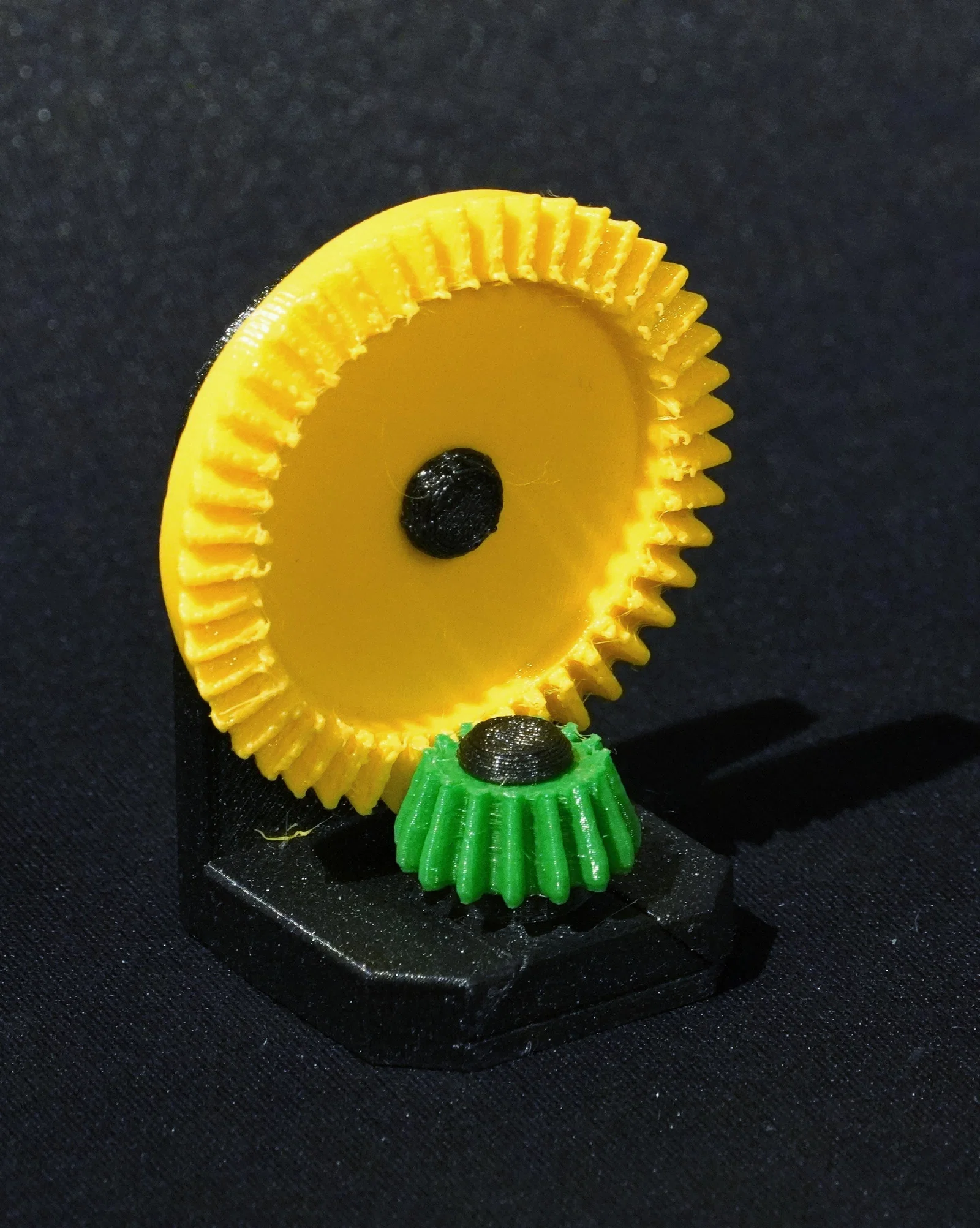
Số 25:
Mô tả:

Với bánh răng côn, chuyển động quay được chuyển hướng theo một góc, thường là 90°. Ngoài ra, có thể sử dụng các bánh răng có kích thước khác nhau để tạo tỷ số truyền. Góc giữa các răng của bánh răng rất quan trọng ở đây.
3D-Modell:
Mô hình có các bánh răng 45 và 15 răng, tạo ra tỷ số truyền 1:3.
Bao gồm file mô hình và hai chốt.
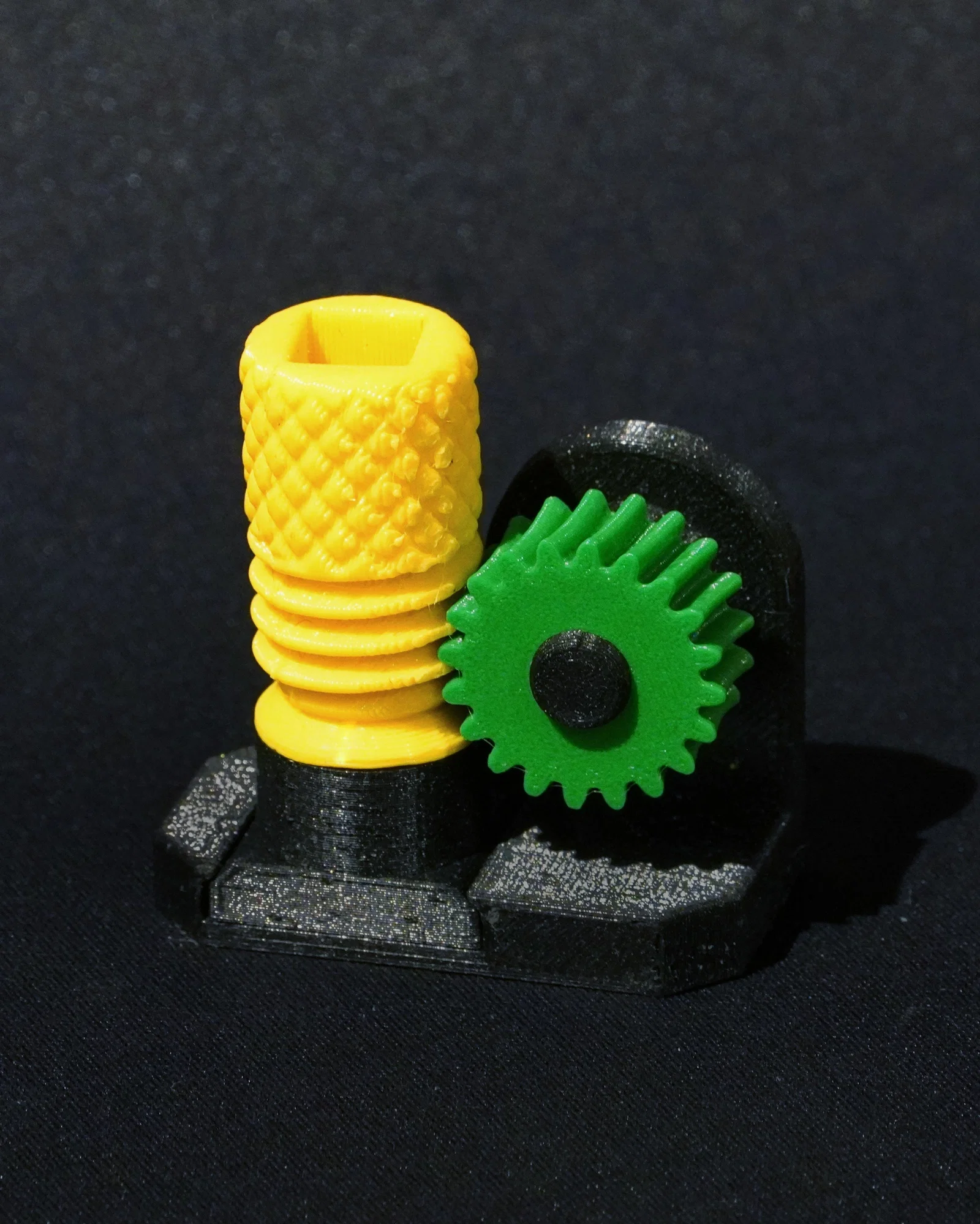
Số 31:
Mô tả:

Bộ truyền động trục vít thường có tỷ số truyền rất cao. Trục vít phải quay quanh trục của nó nhiều lần bằng số răng trên bánh vít. Ngoài ra còn có trục vít đa đầu mối, giúp thay đổi tỷ số truyền tương ứng. Bánh vít trong các bộ truyền này có tính tự khóa. Lưu ý rằng răng của bánh vít được đặt nghiêng, góc này tương ứng với bước ren.
3D-Modell:
Bánh vít có 20 răng, nghĩa là bạn phải xoay trục vít 20 vòng để bánh vít xoay được một vòng. Việc gắn chốt vào mô hình này hơi khó, tốt nhất nên dùng bút để ấn ngược chốt vào.
Bánh vít gồm ba phần riêng biệt để đảm bảo các biên dạng ren được in chính xác. Các phần này cần được dán lại với nhau bằng keo dán sắt.
Bao gồm file mô hình và một chốt.
Số 34:
Mô tả:

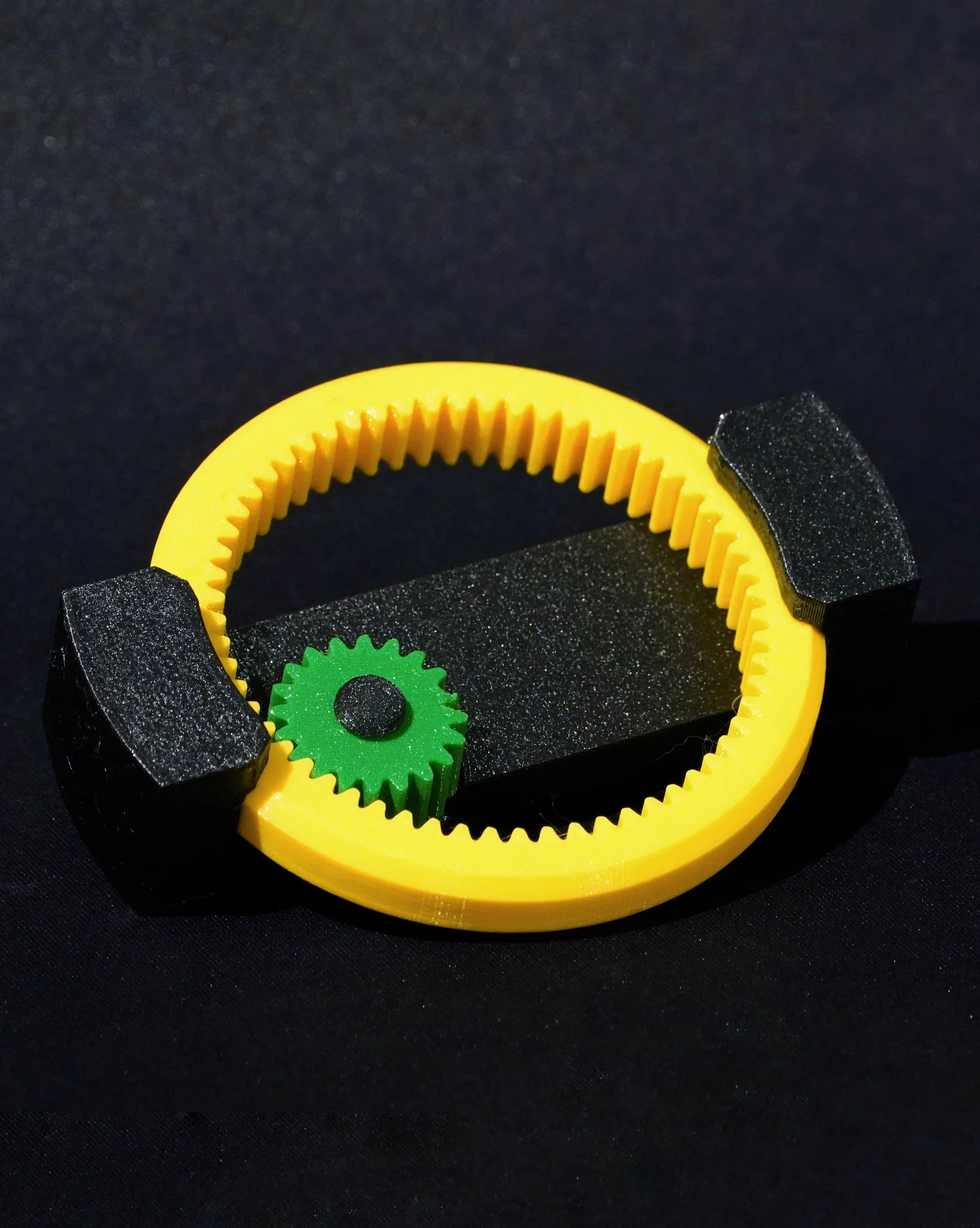
Bánh răng bao (ring gear) về cơ bản là một bánh răng được lộn ngược vào trong, giúp sắp xếp các bánh răng tiết kiệm không gian. Tuy nhiên, bánh răng bao phải lớn hơn đáng kể so với bánh răng trong. Nguyên lý này được sử dụng trong bộ truyền hành tinh (Số 55).
3D-Modell:
Bánh răng bao có 60 răng và bánh trong có 20 răng, tạo ra tỷ số truyền 3:1.
Khi lắp ráp, bánh răng bao phải được lắp khớp với chốt, sau đó mới lắp bánh nhỏ vào.
Bao gồm file mô hình và một chốt.
Số 50:
Mô tả:

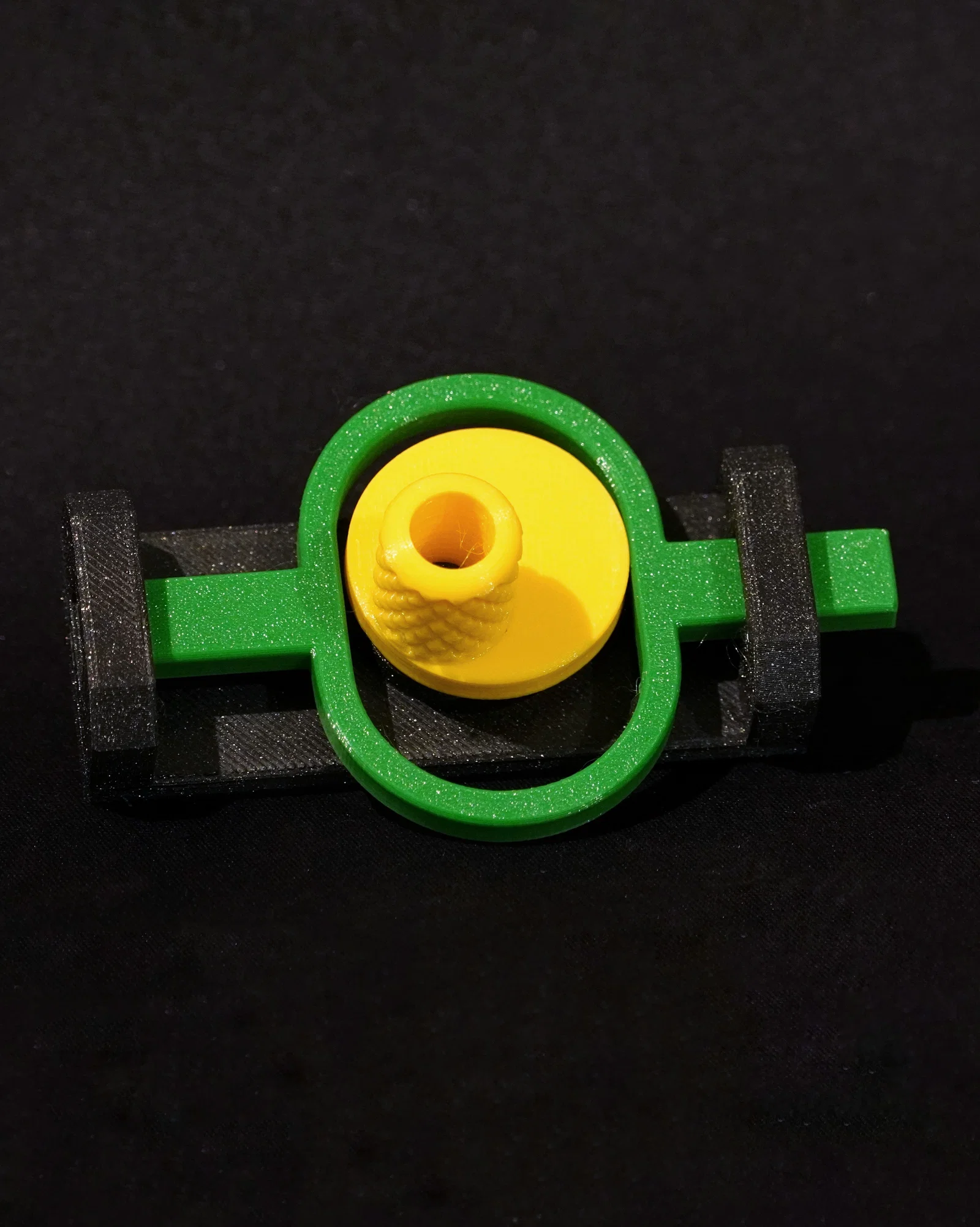
Với khớp nối đa năng (universal joint), chuyển động quay có thể được dẫn hướng theo một góc linh hoạt. Đây là lý do hệ thống này được dùng trên xe kéo dẫn động bốn bánh. Lần đầu tiên hệ thống này được ghi nhận là vào năm 1354, dùng trong đồng hồ nhà thờ.
3D-Modell:
Hiện tại bạn nên xoay phần màu xanh lá, nếu không khớp nối có thể bị kéo ra khỏi đế. Tôi sẽ cải tiến phần này sau.
Số 55:
Mô tả:

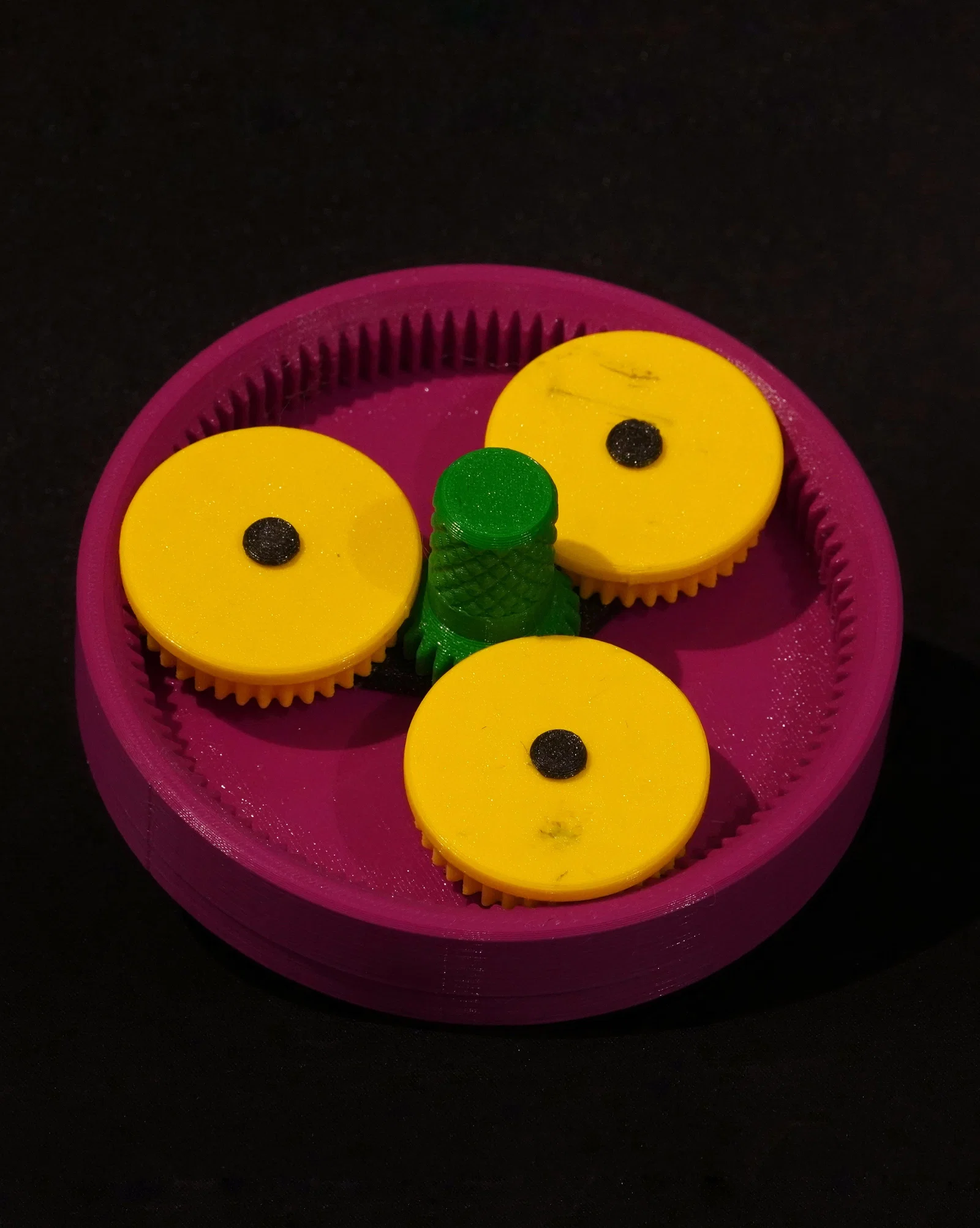
Bộ truyền hành tinh rất ấn tượng. Chúng có tỷ số truyền khác nhau tùy thuộc vào việc bộ phận nào không quay. Chúng thường có tỷ số truyền cao, có thể tăng lên bằng cách ghép nối tiếp. Bộ truyền hành tinh được sử dụng trong máy khoan cầm tay, và gần đây tôi còn nghe nói chúng được dùng trong máy đùn (extruder) của máy in 3D đấy ;)
3D-Modell:
Bánh răng bao (tím) có 100 răng, bánh mặt trời (xanh lá) có 24 răng. Kết quả các tỷ số truyền như sau:
Đầu vào (xanh lá): Bánh mặt trời Đầu ra (vàng+đen): Cần hành tinh Cố định (tím): Bánh răng bao 1:5,167
Đầu vào (tím): Bánh răng bao

Đầu ra (vàng+đen): Cần hành tinh Cố định (xanh lá): Bánh mặt trời 1:1,240
Đầu vào (xanh lá): Bánh mặt trời Đầu ra (tím): Bánh răng bao Cố định (vàng+đen): Cần hành tinh 1:-4,167 (- có nghĩa là quay ngược chiều)
Tôi dán các chốt của cần hành tinh vào cần bằng keo dán sắt. Tôi cũng bôi một ít mỡ vào mặt răng để bộ truyền chạy mượt hơn.
Bao gồm file mô hình và ba chốt.
Số 56:
Mô tả:

Đây là một hộp số có thể đóng ngắt. Cần gạt được sử dụng để di chuyển bánh răng phía trên sao cho các răng không còn khớp nhau.
3D-Modell:
Các bánh răng giống như số 24. Cần gạt phải được đẩy hoàn toàn vào vị trí cuối.
Bao gồm file mô hình và hai chốt.
Số 74:
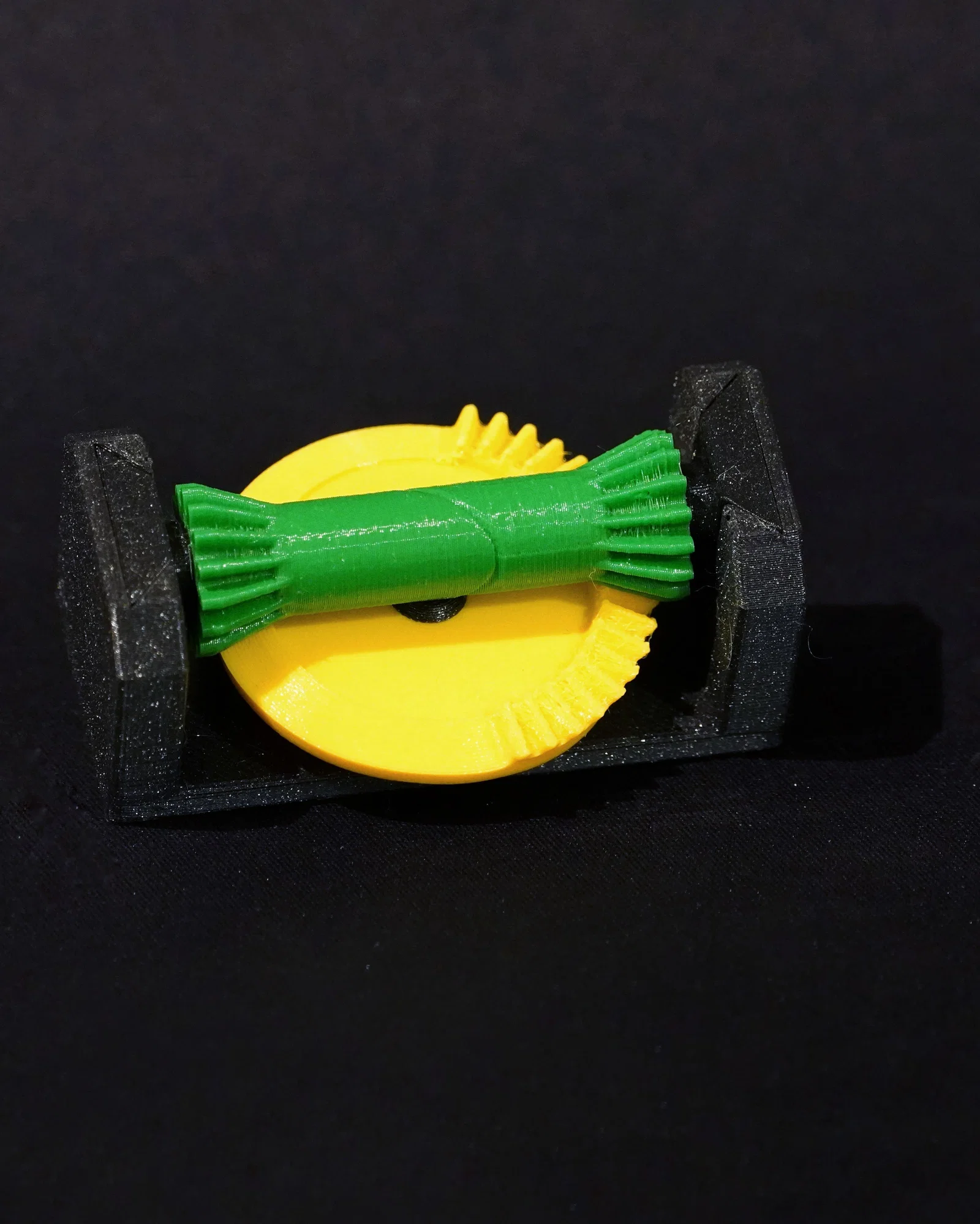
Mô tả:

Trục luôn được xoay luân phiên tới rồi lui bởi bánh răng côn bán phần. Trong bản vẽ gốc, hai bánh răng côn riêng biệt được sử dụng. Bạn có thể làm tương tự bằng cách sử dụng bánh răng côn nhỏ từ số 25 và thêm hai chốt.
3D-Modell:
Khi lắp ráp, bạn phải đảm bảo các giá đỡ trục được lắp đúng cách. Đầu ngắn hơn phải hướng về phía bánh răng côn bán phần. Vì các giá đỡ này luôn nhấc lên khi quay, tôi đã dán cố định chúng bằng keo dán sắt.
Bao gồm file mô hình và một chốt.
Số 90:
Mô tả:

Một trục lệch tâm (excenter) đang quay sẽ dẫn động một thanh đẩy tạo thành chuyển động tuyến tính. Trong phiên bản này, trục lệch tâm trượt trên một bề mặt.
3D-Modell:
Để lắp chốt, bạn có thể đặt nó lên đầu bút, sau đó lắp phần cần thiết vào theo chiều ngược.
Bao gồm file mô hình và một chốt.
Số 92:
Mô tả:

Đây là chuyển động tay quay cổ điển, cùng nguyên lý được sử dụng trong động cơ đốt trong. Điểm khác biệt duy nhất là ở đây dùng đĩa thay vì trục khuỷu.
3D-Modell:
Bao gồm file mô hình và ba chốt.
Số 93:
Mô tả:

Tương tự số 90, chuyển động lệch tâm chuyển đổi chuyển động quay thành chuyển động tuyến tính. Điểm khác biệt là puly dẫn động quay đồng tâm và một chốt lệch tâm tạo ra hành trình tuyến tính.
3D-Modell:
Tay quay màu vàng được in thành hai phần. Đầu tiên lắp đĩa vàng, sau đó lắp tay quay xanh lá và cuối cùng chèn tay cầm vàng vào.
Chỉ bao gồm file mô hình.
Số 97:
Mô tả:

Đĩa cam này có hình trái tim, thực tế hình dạng này được tạo từ một đường xoắn ốc tăng dần đều, được đối xứng qua một nửa vòng. Nó được gọi là cam hình tim vì hình dáng đặc trưng đó. Đường xoắn ốc đều đặn tạo ra một chuyển động rất tuyến tính.
3D-Modell:
Để tạo một đường xoắn ốc trên bề mặt tròn, trước tiên hãy vẽ nhiều vòng tròn có bán kính tăng dần đều. Đồng thời chia bề mặt tròn thành các miếng bánh bằng nhau. Đường xoắn ốc bắt đầu từ giữa và di chuyển ra ngoài, chuyển sang vòng tròn lớn hơn với mỗi phân đoạn mới. Sau điểm giữa, hình dạng sẽ được đối xứng lại.
Bao gồm file mô hình và một chốt.

Số 100:
Mô tả:

Chuyển động quay được chuyển đổi thành chuyển động dao động. Điều thú vị là nếu điểm dẫn động gần điểm trục của đòn bẩy, chuyển động qua lại sẽ nhanh hơn so với khi ở phía đối diện.
3D-Modell:
Bao gồm file mô hình và hai chốt.
Số 103:
Mô tả:

Đây là bộ truyền trục vít (spindle drive) cổ điển. Ví dụ, trục Z của máy in 3D thường được dẫn động theo cách này, và nguyên lý này cũng được dùng trong các loại ê tô.
3D-Modell:
Trục vít được làm từ hai mảnh và dán lại bằng keo dán sắt. Sau đó nó được ấn vào giá đỡ và xe trượt được vặn vào. Tôi dùng ren thang vì nó có bước ren lớn hơn ren tiêu chuẩn. Với loại ren này, thanh trượt di chuyển 3mm mỗi vòng xoay, so với 2mm của ren tiêu chuẩn.
Chỉ bao gồm file mô hình.
Số 106:
Mô tả:

Một rãnh trên trục quay dẫn đến chuyển động tuyến tính. Rãnh cũng có thể được thiết kế không tuyến tính, cho phép thực hiện nhiều loại chuyển động đa dạng.
3D-Modell:
Rãnh được đặt ở góc 45°, giúp chuyển động mượt mà. Trục màu vàng gồm hai mảnh để dễ in hơn và cần được dán lại bằng keo dán sắt.
Chỉ bao gồm file mô hình.
Số 113:
Mô tả:

Đây là bộ truyền thanh răng. Về nguyên tắc, thanh răng là một bánh răng có đường kính vô hạn, tạo thành đường thẳng. Trong trường hợp này, hình dạng răng của thanh răng sẽ là hình thang.
3D-Modell:
Nếu cần thiết, giá đỡ hai mảnh có thể được dán lại với nhau.
Bao gồm file mô hình và một chốt.
Tập tin:
Tên file được cấu trúc như sau: _No1C1 No1 là số thứ tự trong sách. C1 là màu sắc. Trong ảnh của tôi: C1 = đen C2 = vàng C3 = xanh lá C4 = tím
Nếu nhiều bộ phận cùng màu, một chỉ số sẽ được thêm vào. Khi một bộ phận cần nhiều lần, số lượng nằm ở cuối. Ví dụ: No50_C2-2x
Chốt (rivet) cần thiết cho nhiều mô hình có nhiều kích cỡ. Hãy thử xem loại nào vừa nhất với máy in của bạn.
Thiết lập in:
Tôi dùng PETG cho tất cả. PLA có thể tốt hơn cho các bánh răng vì các cấu trúc tinh xảo sẽ in đẹp hơn với PLA. Các bộ phận cần độ đàn hồi (như tay đòn của số 50) nên in bằng PETG. Không cần hỗ trợ (support) và các chi tiết đều đã được đặt đúng hướng.
Hậu kỳ:
Nếu các con lăn hoặc bánh răng khó quay, trước tiên hãy dùng dao cạo bỏ lớp nhựa thừa (Z-seam) trên trục. WD-40 cũng giúp ích rất nhiều.
Cập nhật:
Sau khi in các bản mẫu, tôi đã thực hiện vài thay đổi. Số 50: Các lỗ trên đế được mở rộng. Số 55: Thêm vân nhám vào bánh răng bao và dập nổi số.
Tôi dự định sẽ tạo thêm nhiều cơ cấu khác. Nếu bạn có ý tưởng hay góp ý, hãy cho tôi biết nhé.
19.10.2024 Thêm No92 và No100.
20.10.2024 Thêm No106.
01.11.2024 Thêm No103 và No113. Sau khi in bản mẫu của trục vít, tôi đã cắt bớt một chút phần đầu (trong CAD) vì nó khiến trục xoay bị cứng trong đai ốc.
12.12.2024 Thêm No97.
Giấy phép

File mô hình










































































Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!