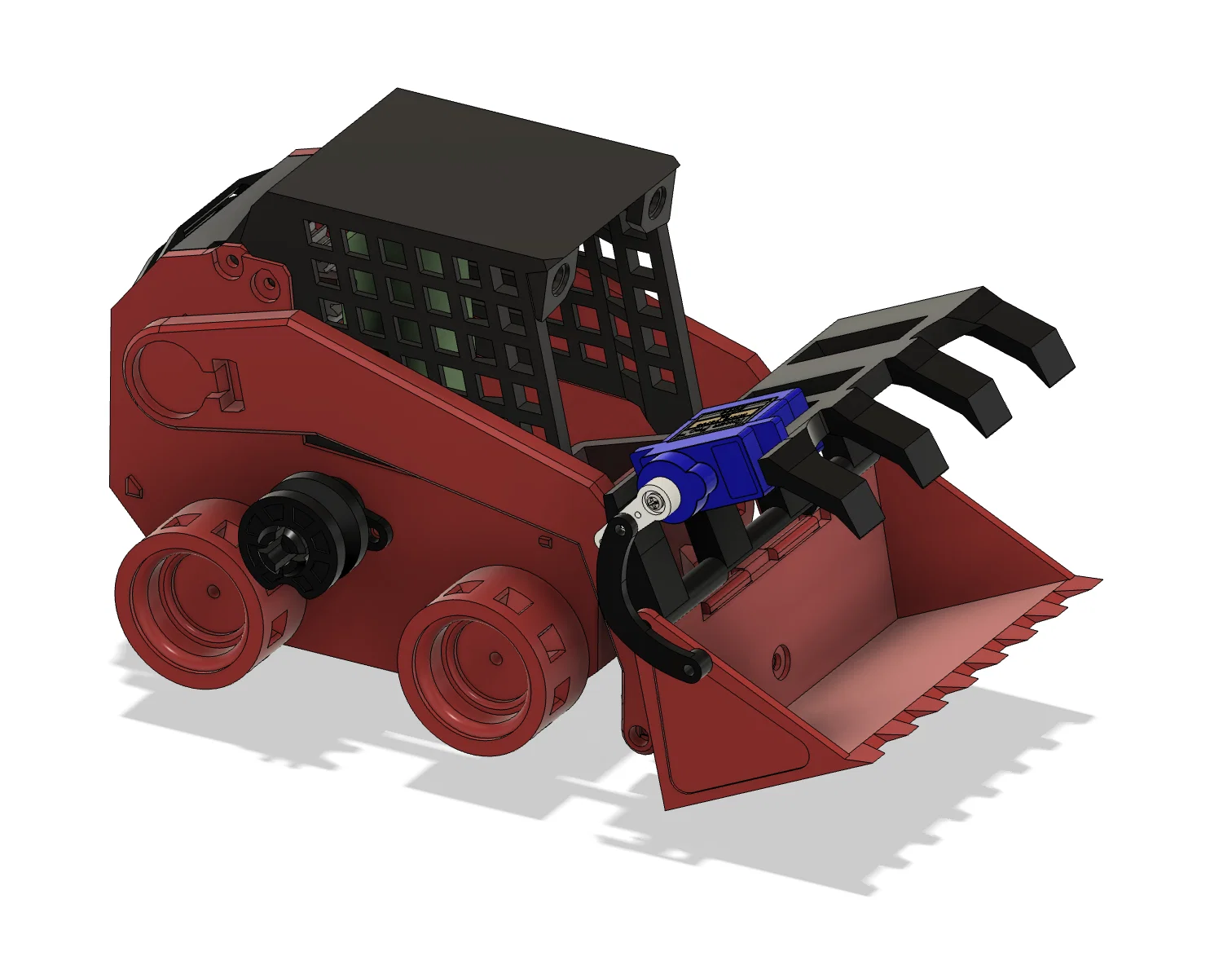
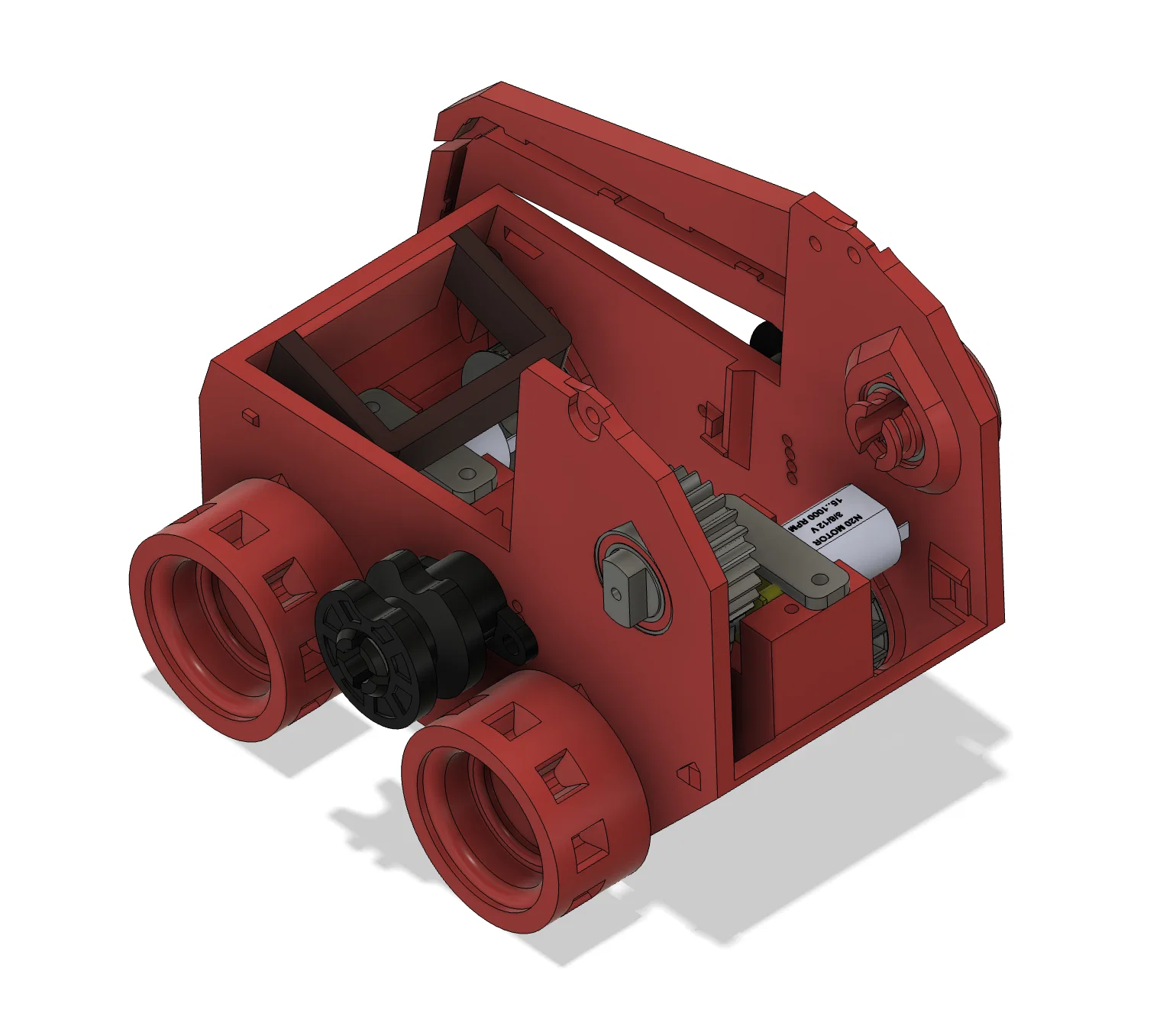
Xe Xúc Lật Điều Khiển Từ Xa (RC SkidSteer) V4.0 In 3D
Phiên bản V4.0 với nhiều cải tiến: khả năng in dễ dàng hơn, firmware hỗ trợ tay cầm chơi game qua Bluetooth, tương thích PCB V2, sử dụng bạc đạn cho chuyển động mượt mà và tối ưu hóa BOM cho hiệu suất cao hơn.










Mô tả
Tóm tắt
Ban đầu tôi chỉ định điều chỉnh một chút để in dễ dàng hơn và làm cho nó tương thích với mạch PCB tôi đang có. Nhưng mọi thứ nhanh chóng phát triển thành hàng loạt cải tiến về khả năng in, sửa lỗi firmware, tối ưu hóa danh sách linh kiện (BOM) và nhiều thứ khác. Vì vậy, tôi quyết định gọi phiên bản này là V4.0.
Cải tiến Firmware
Đã sửa một số lỗi nhỏ và loại bỏ các độ trễ để vận hành mượt mà hơn. Giờ đây, xe đã có điều khiển tỷ lệ (proportional control) cho cả tay gầu và di chuyển, giúp điều khiển chính xác hơn nhiều. Tôi đã chuyển sang thư viện bluepad32, giúp nó tương thích với nhiều loại tay cầm chơi game như PS4, PS5, Xbox, Google Stadia và nhiều loại khác. Quy trình kết nối cũng đơn giản hơn, bạn chỉ cần đưa tay cầm vào chế độ kết nối (pairing mode) rồi bật xe lên, khi tìm thấy tay cầm, xe sẽ lắc nhẹ bánh vài cái là sẵn sàng hoạt động.
Firmware mới có sẵn tại đây: https://github.com/Le0Michine/MiniSkidi-V4/blob/main/MiniSkidi_4.0/MiniSkidi_4.0.ino
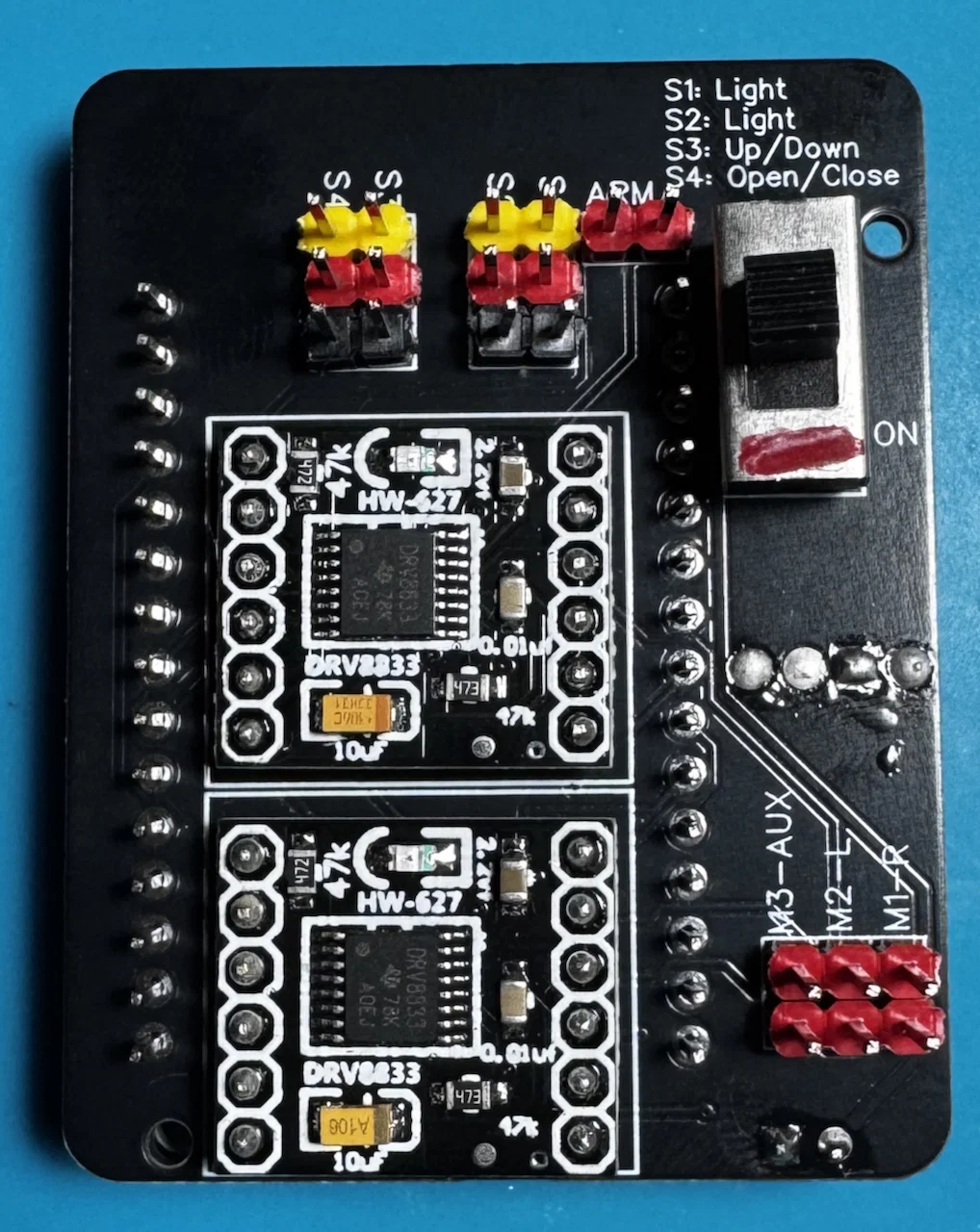
Sửa lỗi PCB V2
Tôi đã đính kèm file Gerber cho PCB mới, bao gồm các sửa lỗi cần thiết để bo mạch hoạt động tốt hơn, giúp bạn không cần phải tự sửa đổi thủ công trên mạch gốc. Các linh kiện lắp ráp vẫn giữ nguyên, ngoại trừ các đầu nối động cơ: thay vì dùng cầu đấu vít, chúng ta dùng đầu nối dupont, loại này chịu dòng tốt hơn và lắp ráp dễ dàng hơn. Mỗi kết nối đều đã được dán nhãn.


Hỗ trợ PCB V2
File Gerber có trong phần “Other Files” cũng như trong kho lưu trữ firmware tại đây: https://github.com/Le0Michine/MiniSkidi-V4.
Vì chỉ có PCB V2 được chia sẻ miễn phí nên tôi đã thiết kế lại khung chính để vừa với nó. Tiếc là phiên bản PCB đó có vài vấn đề:
- Đường nguồn cho động cơ đi qua bộ hạ áp làm giới hạn đáng kể tốc độ.
- Nó nối cả 3 kênh phụ (aux) vào các chân ESP32 không thể dùng làm đầu ra, khiến đèn không thể điều khiển được.
Cả hai vấn đề này đều dễ dàng khắc phục.
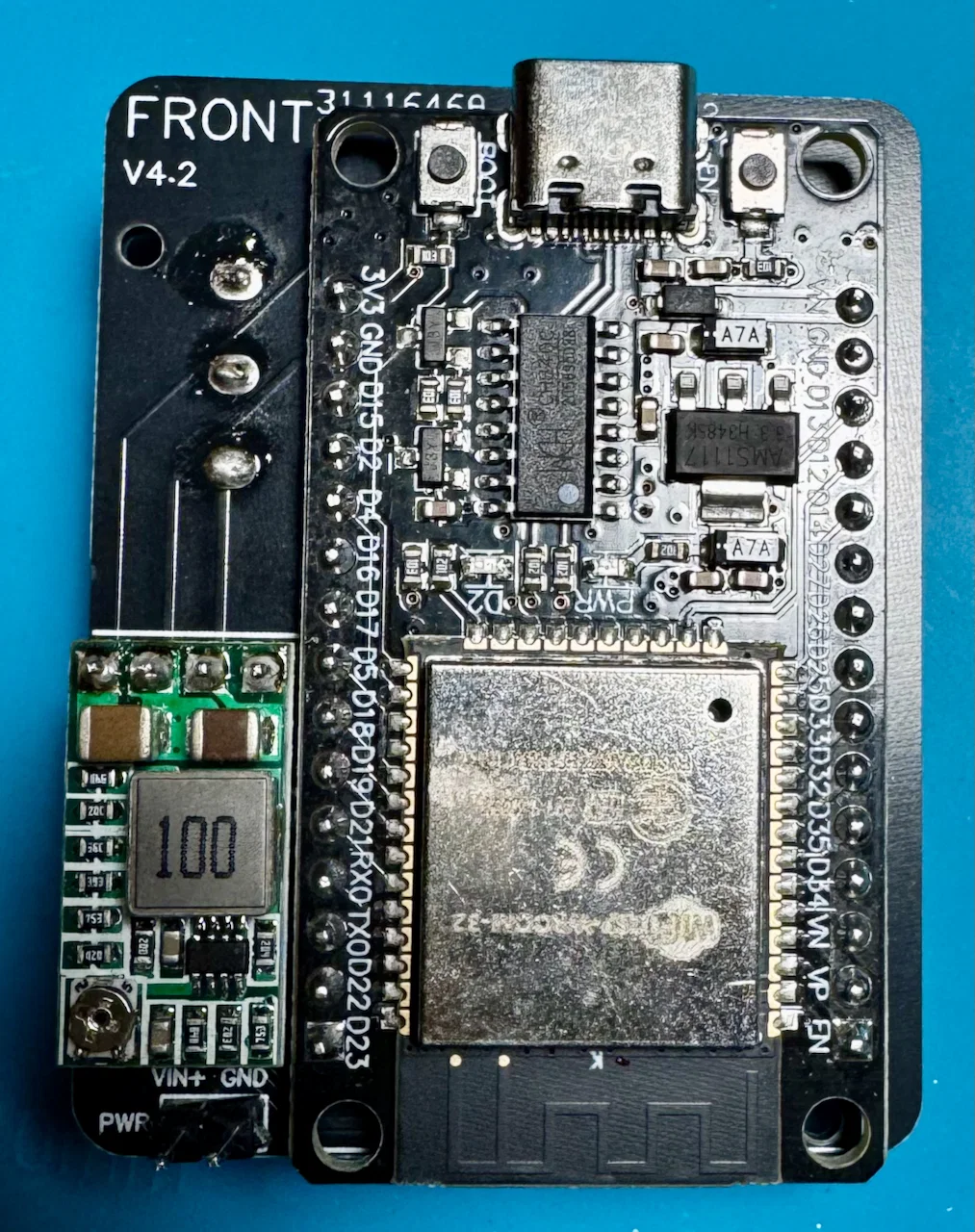
Chuyển hướng nguồn
Để chuyển nguồn trực tiếp từ pin vào động cơ N12, bạn cần dùng dao rọc giấy cắt đường mạch cũ như hình:

Sau đó, sau khi hàn các chân, hãy nối các điểm đã làm nổi bật bằng dây điện:


Để nối các kênh aux, ta dùng chân 16 và 17 (firmware mới đã thiết lập để điều khiển đèn ở các chân này). Đầu tiên, cần cắt các đường mạch cũ như bên dưới:

Sau đó nối đầu ra vào chân 16 và 17 như hình dưới đây. Hãy đảm bảo thực hiện bước này sau khi đã hàn xong các đầu nối lên bo mạch:

Lời khuyên là nên dùng đầu nối dupont thay cho cầu đấu vít vì nó phổ biến hơn và bạn cũng cần nó cho servo.



Pin
Vì không mua được pin Fenix khuyến nghị, tôi chọn pin sạc 9V. Loại pin này thực chất là 2 cell Li-ion tiêu chuẩn (không đạt đủ 9V dù đã sạc đầy), có cổng sạc USB và hình dáng nhỏ gọn, rất phù hợp cho dự án.

Đầu nối có thể hàn vào các lỗ gắn XT30. Pin được trượt vào khay ở phía trước xe. Tôi dùng dây thun để giữ cho pin không bị rơi khi xe bị lật.


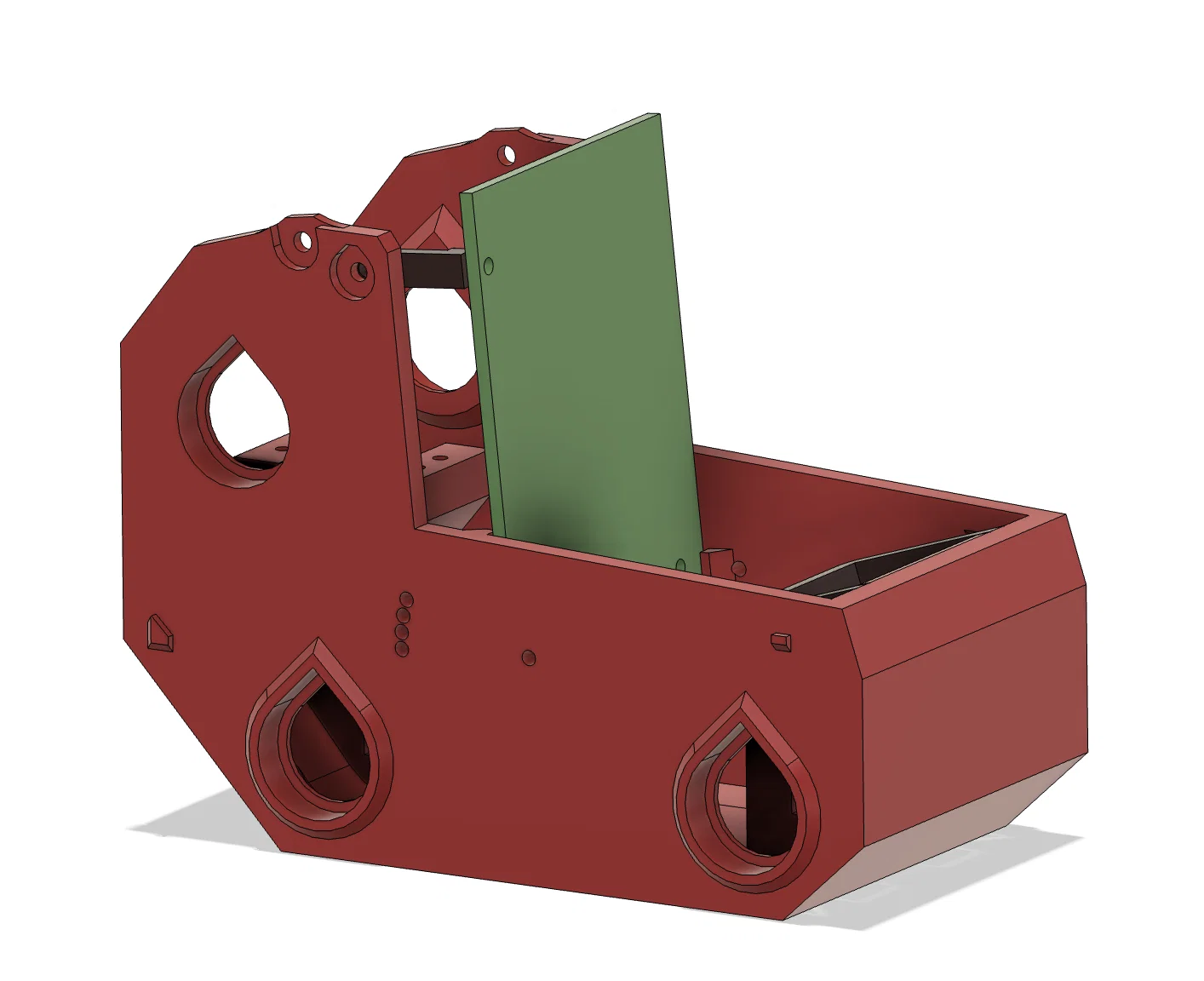
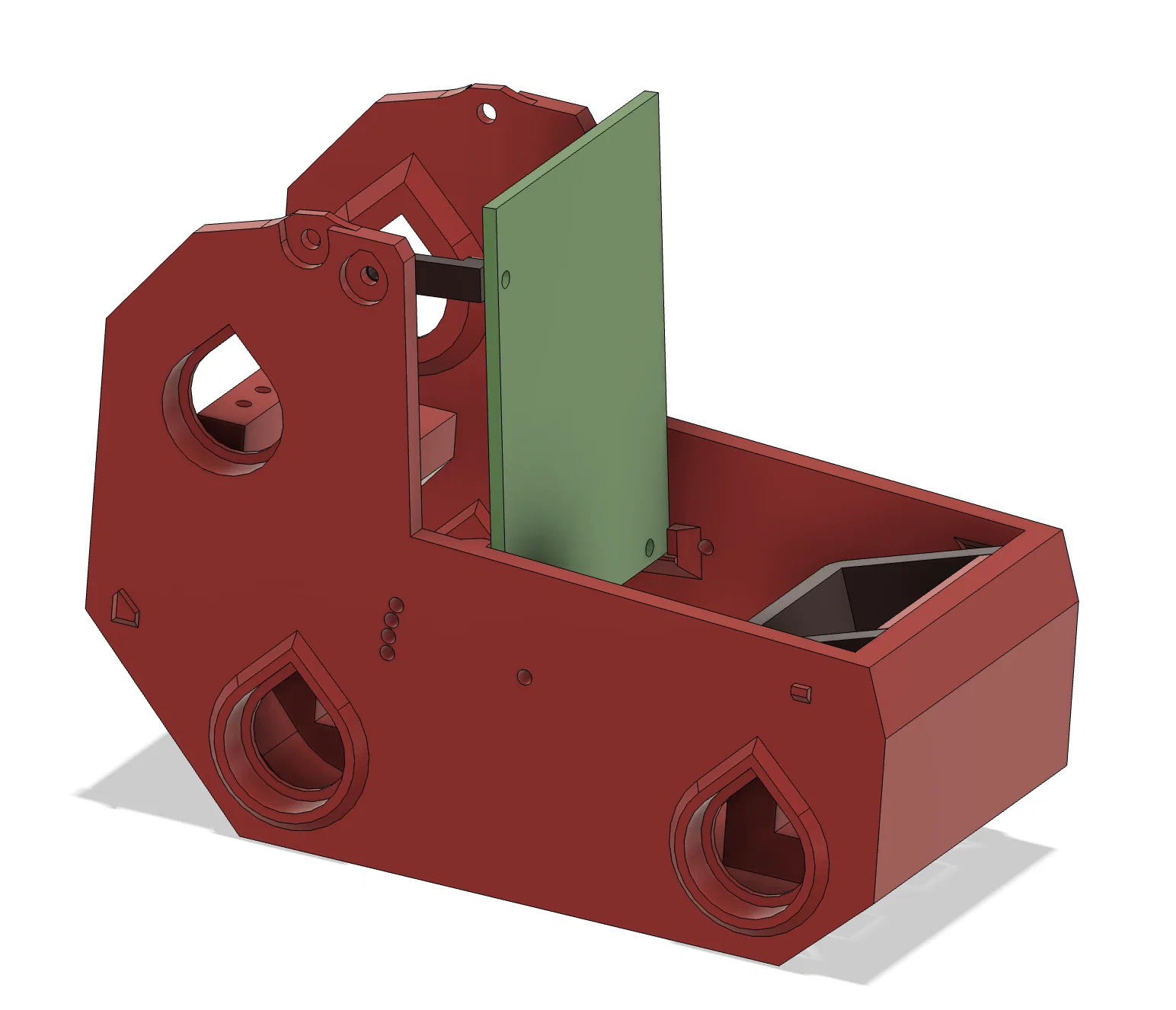
Lắp đặt PCB
Bước này thực hiện cuối cùng sau khi đã lắp ráp mọi thứ. Phần dưới của PCB sẽ trượt vào các rãnh ở hai bên khung, phần trên được cố định bằng một vít.

Cải tiến khả năng in
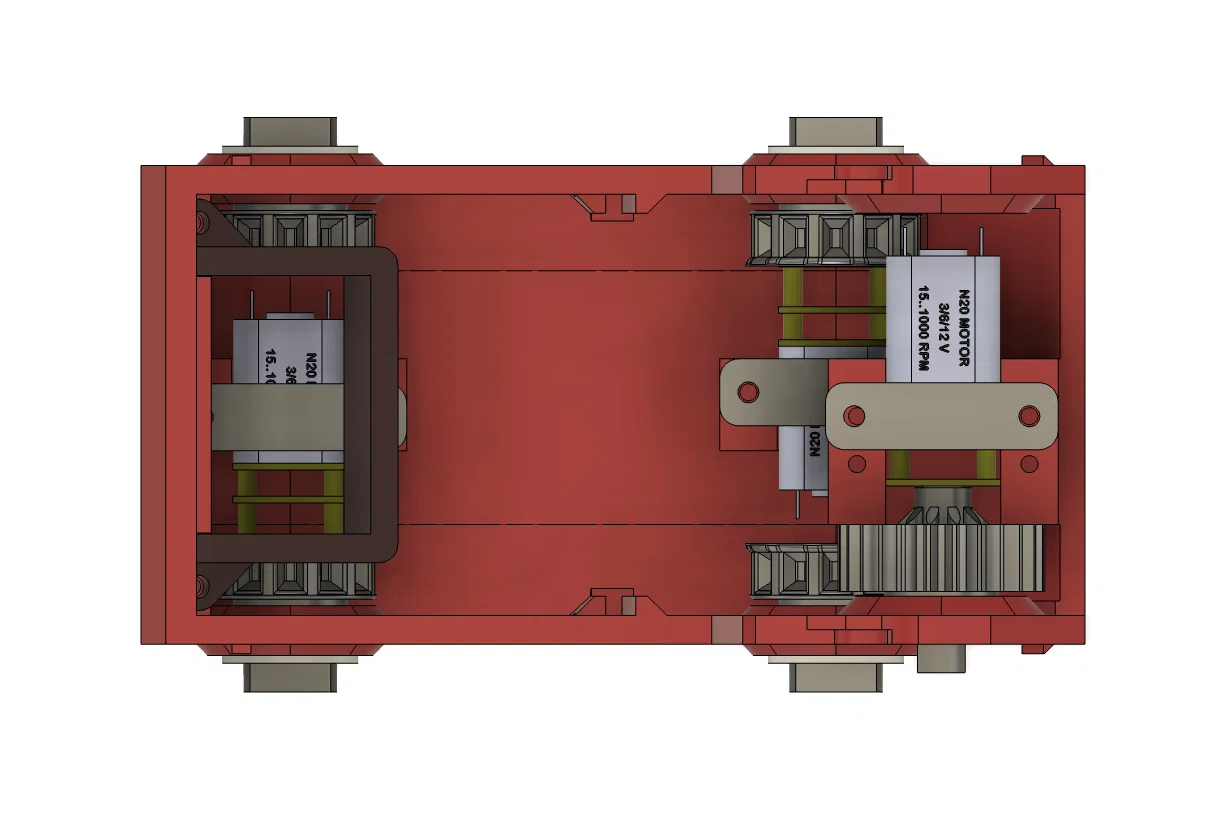
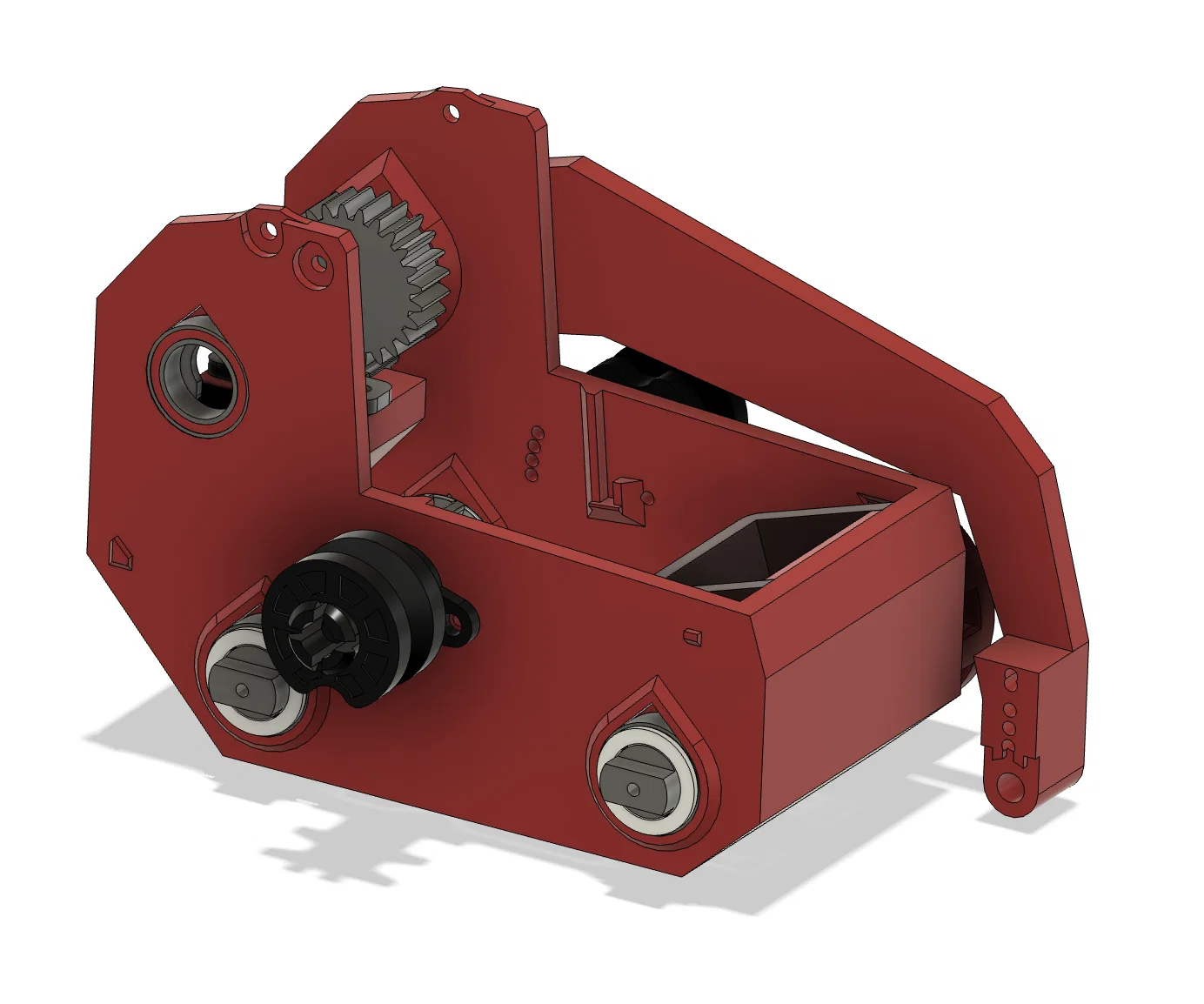
Các chi tiết đã được chỉnh sửa để in dễ hơn bằng cách loại bỏ các phần thừa. Khung chính giờ đã vừa với PCB V2. Bánh răng được làm dày hơn để cứng cáp hơn. Việc thêm bạc đạn (bearings) cho trục tay gầu giúp chuyển động mượt mà và tránh trượt bánh răng.
Bạc đạn và vít
Phiên bản này cần 6 bạc đạn 10x15x4 để vận hành mượt mà. Vui lòng lắp trục và động cơ trước khi lắp bạc đạn vì không gian rất hạn chế.
BOM (Linh kiện không in)
- 31 vít 2x8mm đầu rộng
- 1 vít 2x8mm đầu nhỏ (gắn tay gầu)
- 2 đèn LED 3mm + đế
- 2 động cơ servo 9g
- 1 bo mạch ESP32 WROOM-32
- 1 công tắc SS12D10
- 1 đầu nối pin 9V
- 1 bộ hạ áp DC-DC
- 3 động cơ N20 12V 100RPM
- 2 bo điều khiển động cơ DRV8833
- 6 bạc đạn 10x15x4mm
Giấy phép

File mô hình





















Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!