Belted Ender by squirrelf - Nâng cấp hệ thống truyền động dây đai cho Ender 3

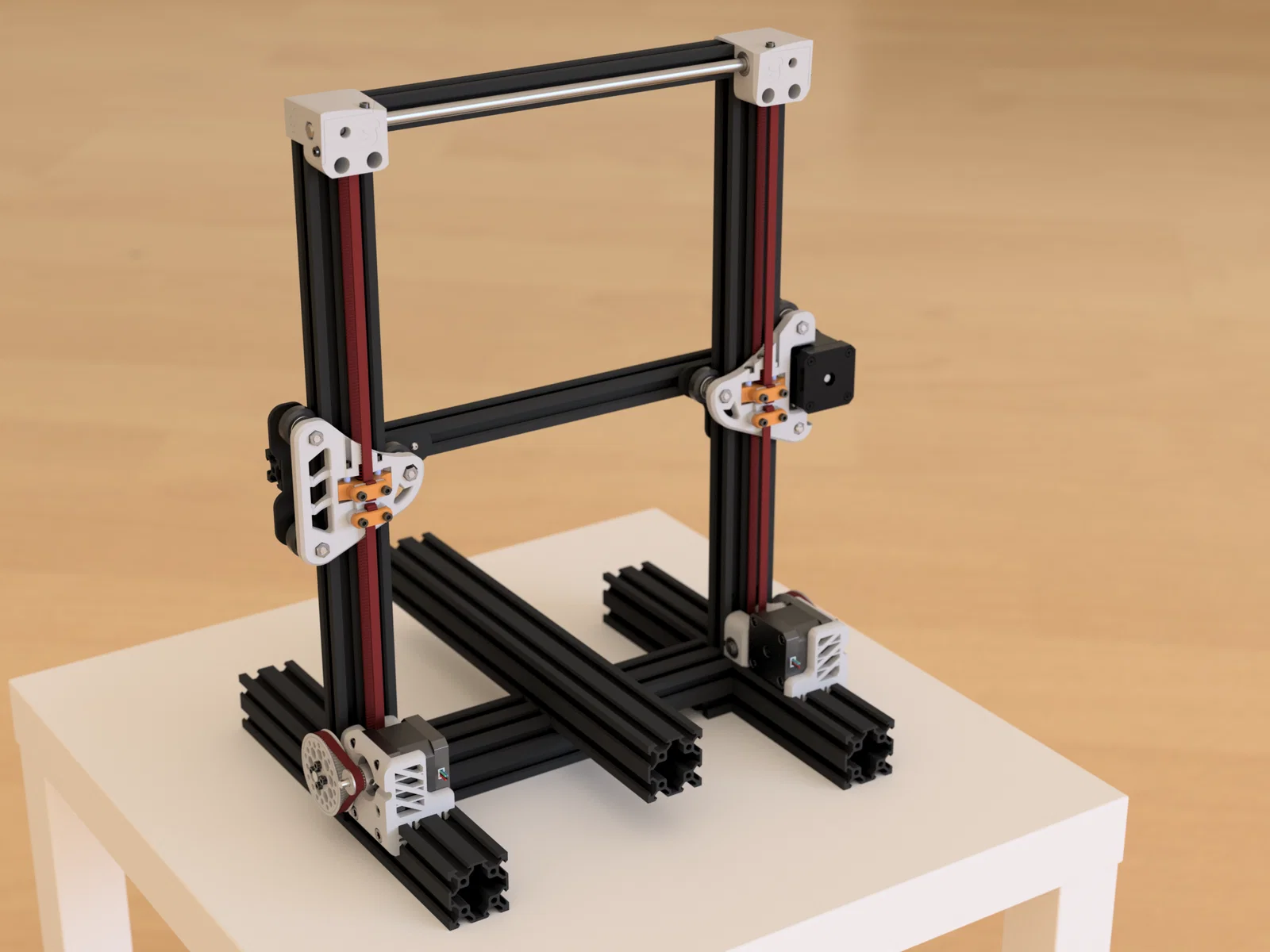
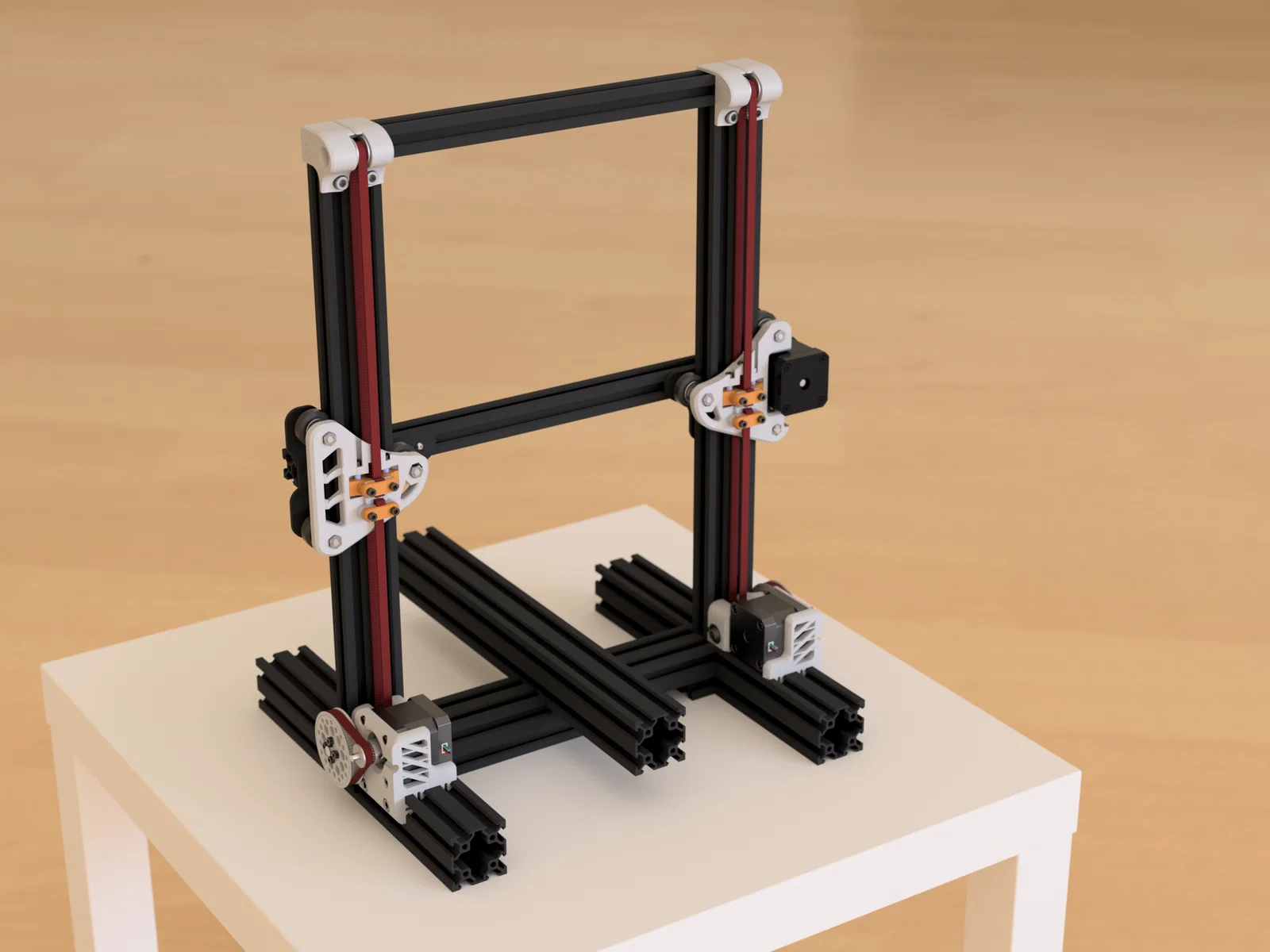
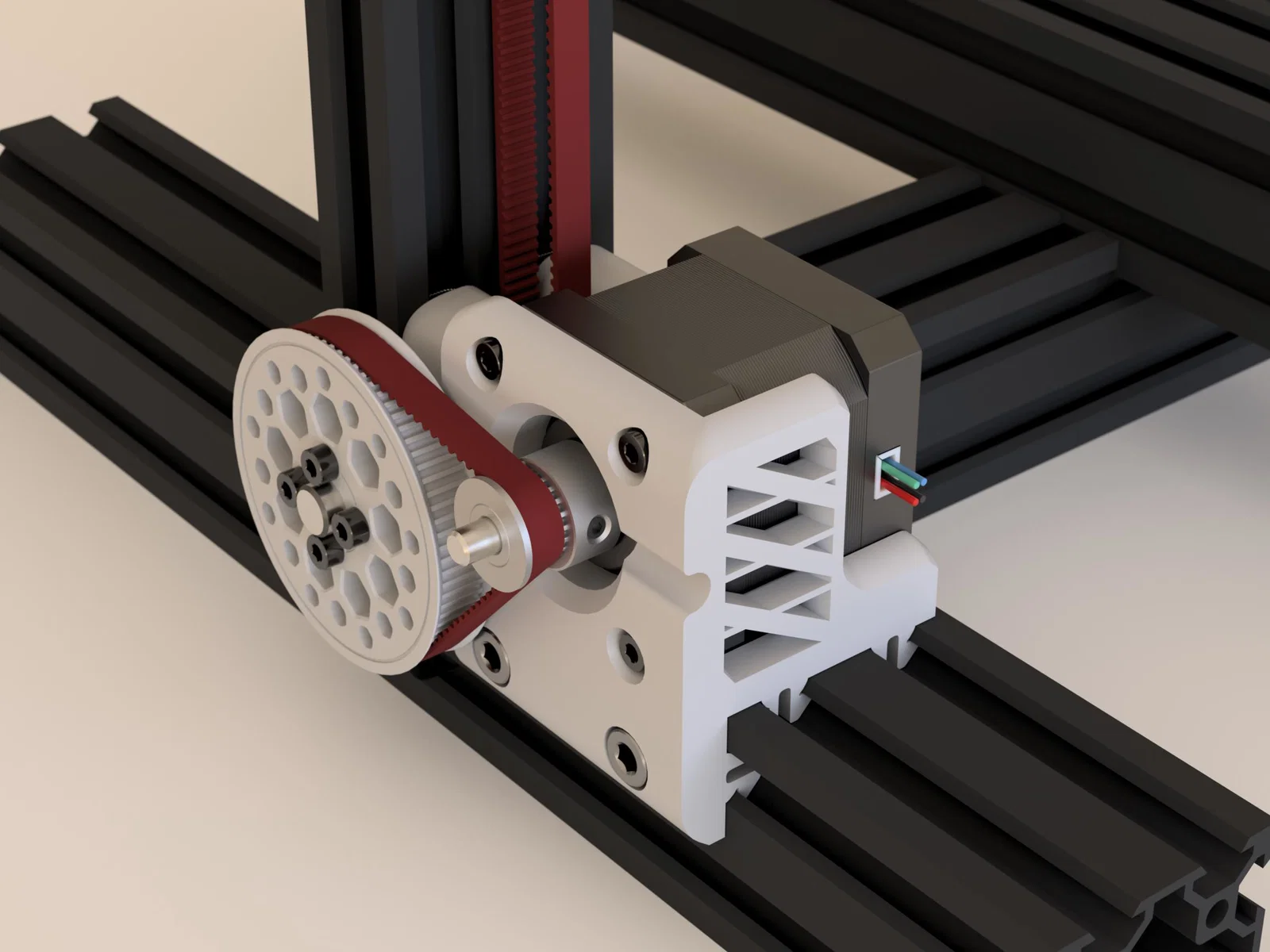
Nâng cấp máy in 3D Ender 3/Pro/V2 của bạn với hệ thống trục Z dẫn động bằng dây đai. Thiết kế hỗ trợ động cơ gắn dưới, hệ thống tự căng dây đai bằng lò xo, giúp cải thiện độ chính xác và vận hành êm ái hơn cho máy in của bạn.





Mô tả
Gửi lời cảm ơn chân thành đến những người đã ủng hộ tôi trên Patreon và hội viên Printable's Club. Nếu không có họ, dự án này sẽ không thể ra đời.
Để ủng hộ công sức, vật liệu, thời gian thử nghiệm và tinh chỉnh của tôi, hãy cân nhắc tham gia Patreon (có cả mẫu ApolloLander shroud) hoặc câu lạc bộ Printables. Tại đây sẽ có thêm các tùy chọn vòng bi (bearing) và kích thước trục dưới, cũng như bạn có thể yêu cầu thêm các chỉnh sửa khác. Sắp tới sẽ hỗ trợ cả Ender 3 Max.
File STEP đã có sẵn trên Patreon và (đã thêm bản mod Z linear rails). Bạn cũng sẽ được tham gia cộng đồng Discord rất thoải mái của tôi.
Không nhận hỗ trợ hoặc yêu cầu mở rộng tại đây, tôi dành quỹ thời gian hạn hẹp đó cho những người ủng hộ mình.
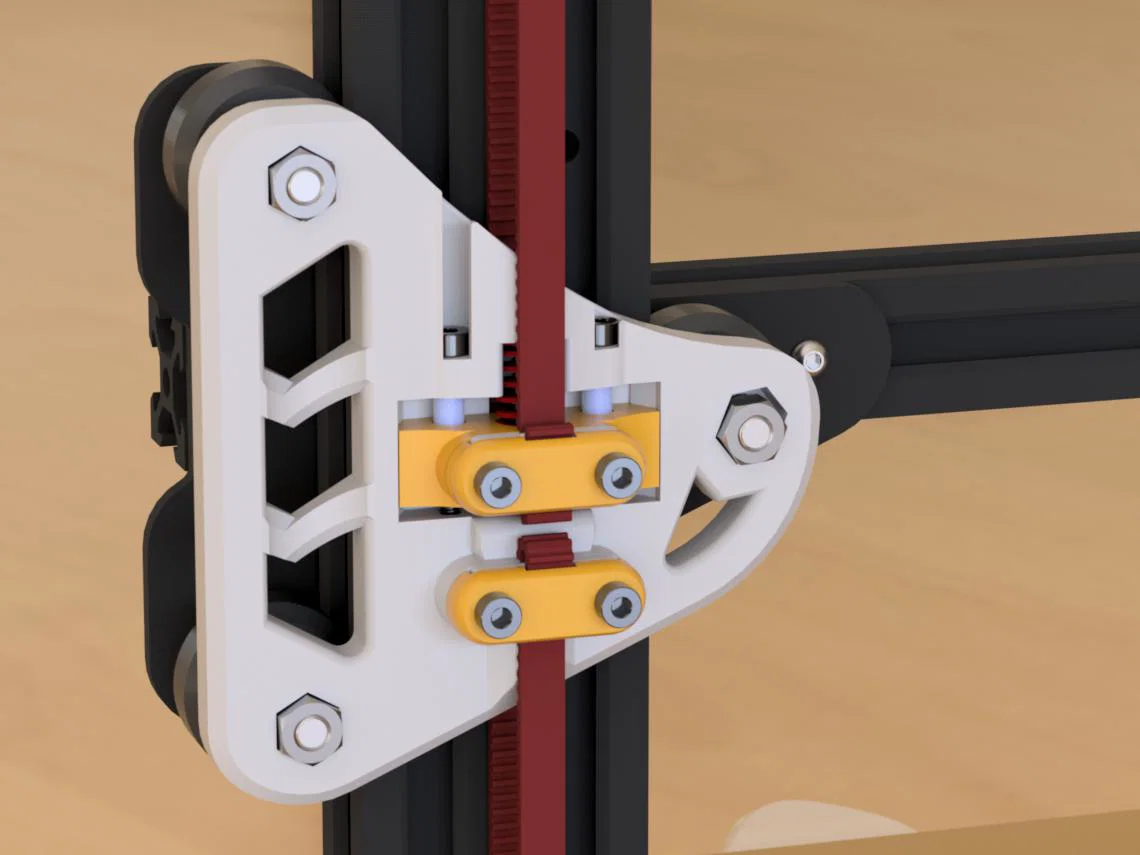
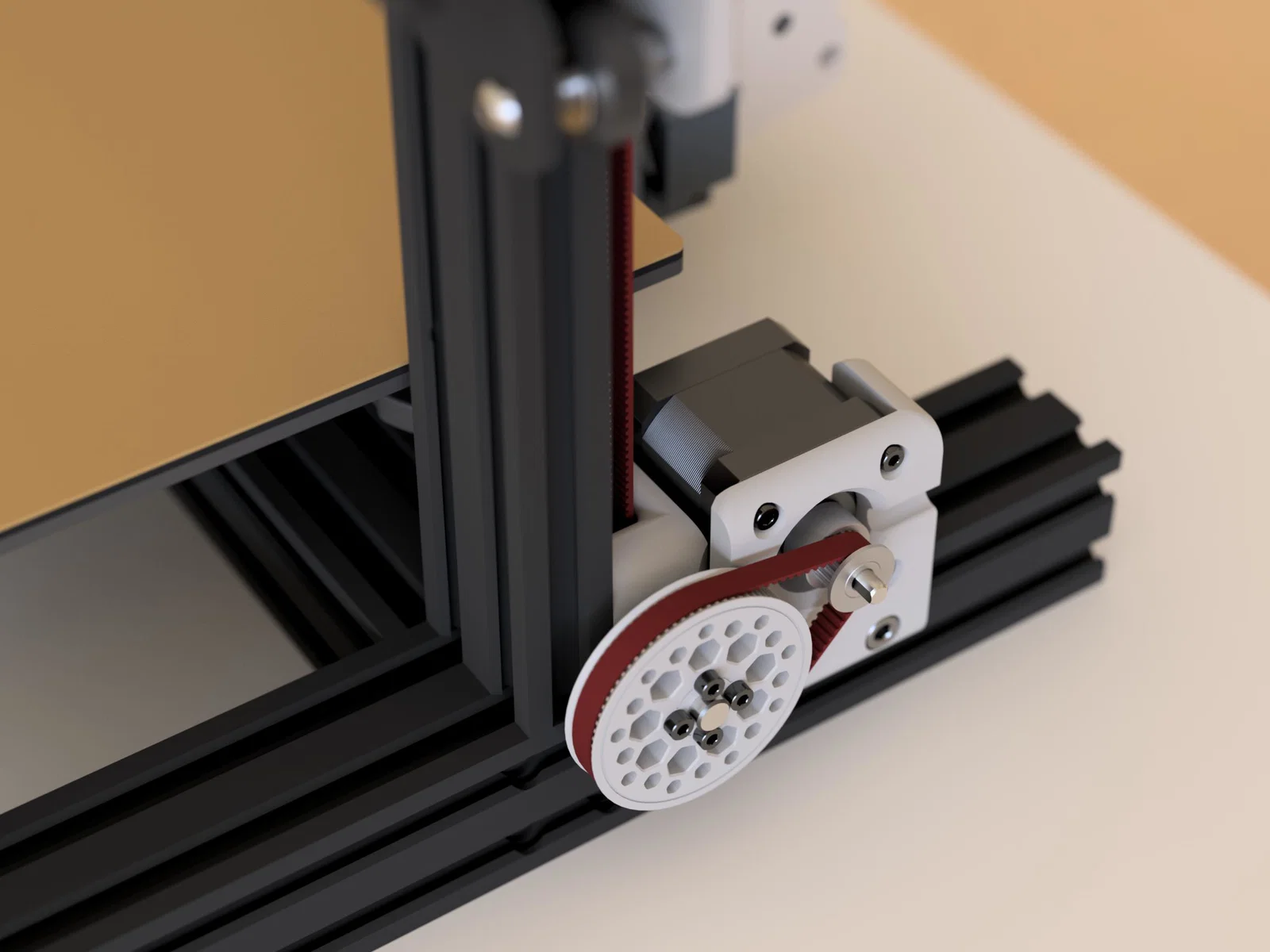
Một cải tiến mới đã được kiểm nghiệm thực tế là hệ thống tự căng dây đai (belt) sử dụng lò xo (hai loại lò xo cụ thể đã được kiểm tra, có thể tìm trên Amazon hoặc AliExpress, xem phần BOM). Dây đai đạt độ căng rất tốt và cả hai bên đồng bộ trong vòng 1Hz. Lò xo vàng và đỏ kích thước 15mmx8mm đã được kiểm tra và hoạt động hiệu quả.

Về kỹ thuật, bạn có thể không cần dùng lò xo mà thay bằng ốc vít (M4x16 hoặc 18). Đầu ốc sẽ đẩy lên, buộc bộ căng dây đi xuống khi bạn nới lỏng nó.
Cách dễ nhất để căng dây đai là di chuyển trục X lên cao nhất để dễ tiếp cận đầu ốc.
Cập nhật: đã thêm tấm XZ v2 và bộ căng dây giúp việc lắp ốc dễ dàng hơn.
Ngày 5 tháng 7: dưới đây là các tấm V2, đã kiểm nghiệm, hoạt động tốt và lắp đặt dễ hơn trước. (Bộ căng cũ không tương thích với tấm V2)

Thiết kế này có thể sẽ được cải tiến thêm nhưng hiện tại đã hoạt động rất tốt.
Tôi đã thử nghiệm trên Ender 3 V2 nên không bị vướng bộ nguồn (PSU), nhưng với Ender 3 và 3 Pro, bạn sẽ cần tìm cách di dời hoặc đẩy lùi PSU về phía sau.
Chỉ hỗ trợ Direct Drive, hiện chưa có đế gắn Extruder, tôi sẽ sớm làm thêm.
---
Không cần in support, độ lấp đầy (infill) từ 30% trở lên. 6 lớp tường (perimeter) trở lên. 6 lớp mặt trên/dưới trở lên.
Tránh dùng PLA cho đế động cơ (motor mount), các bộ phận khác có thể thử nghiệm với vật liệu khác. Tôi đã thử tất cả bằng PETG. Nếu máy có vỏ bọc (enclosure) thì nên dùng ABS hoặc ASA.
BOM (Danh mục vật tư):
(Liên kết tiếp thị Amazon để hỗ trợ dự án)
- (2x) Động cơ NEMA17 (40mm hoặc thấp hơn, tối đa 48mm)
- (2x) Dây đai 188-GT2 6mm
- (2x) Dây đai GT2 6mm - khoảng 2 mét
- (2x) Puly GT2 80 răng, lỗ trục 8mm
- (2x) Lò xo 15mmx8mm vàng hoặc đỏ (cứng hơn sẽ tốt hơn)
- (2x) Puly GT2 16 răng, lỗ trục 5mm (khuyên dùng) hoặc 20 răng
- (2x-4x) Puly GT2 20 răng, lỗ trục 8mm (dùng 4 cái nếu liên kết cơ khí)
- (2x) Thanh trục 60mmx8mm
- (4x-8x) Vòng bi 688
- (4x) Ốc lục giác M3x25
- (8x) Ốc M3x8
- (2x) Ốc M4x20/25 (cho lò xo vàng) hoặc M4x25/30 (cho lò xo đỏ)
- (2x) Đai ốc lục giác M4
- (16x) Ốc M5x18
- (16x) T-nut M5 cho nhôm định hình 2020
- (8x-12x) Heat insert M3 (dài 4mm, đường kính ngoài 4.6 hoặc 5mm)
- Tùy chọn: ống PTFE 60mm (4mm OD x 3mm ID)
Các thiết lập hỗ trợ:
- Individual Z (Z độc lập): Yêu cầu 5 driver bước cho Z-tilt vì mỗi trục Z có thể mất cân bằng khi tắt động cơ.
- Mechanically linked Z (Z liên kết cơ khí): Động cơ có thể chia sẻ driver hoặc chạy riêng lẻ. Về lý thuyết có thể chạy 1 động cơ nhưng chưa chắc chắn về độ trễ cơ khí.
Xem thêm hướng dẫn chi tiết về lắp đặt, klipper và các mẹo cân chỉnh trong file gốc.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình
























Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!