Mô hình robot công nghiệp ABB IRB 1600 in 3D chi tiết

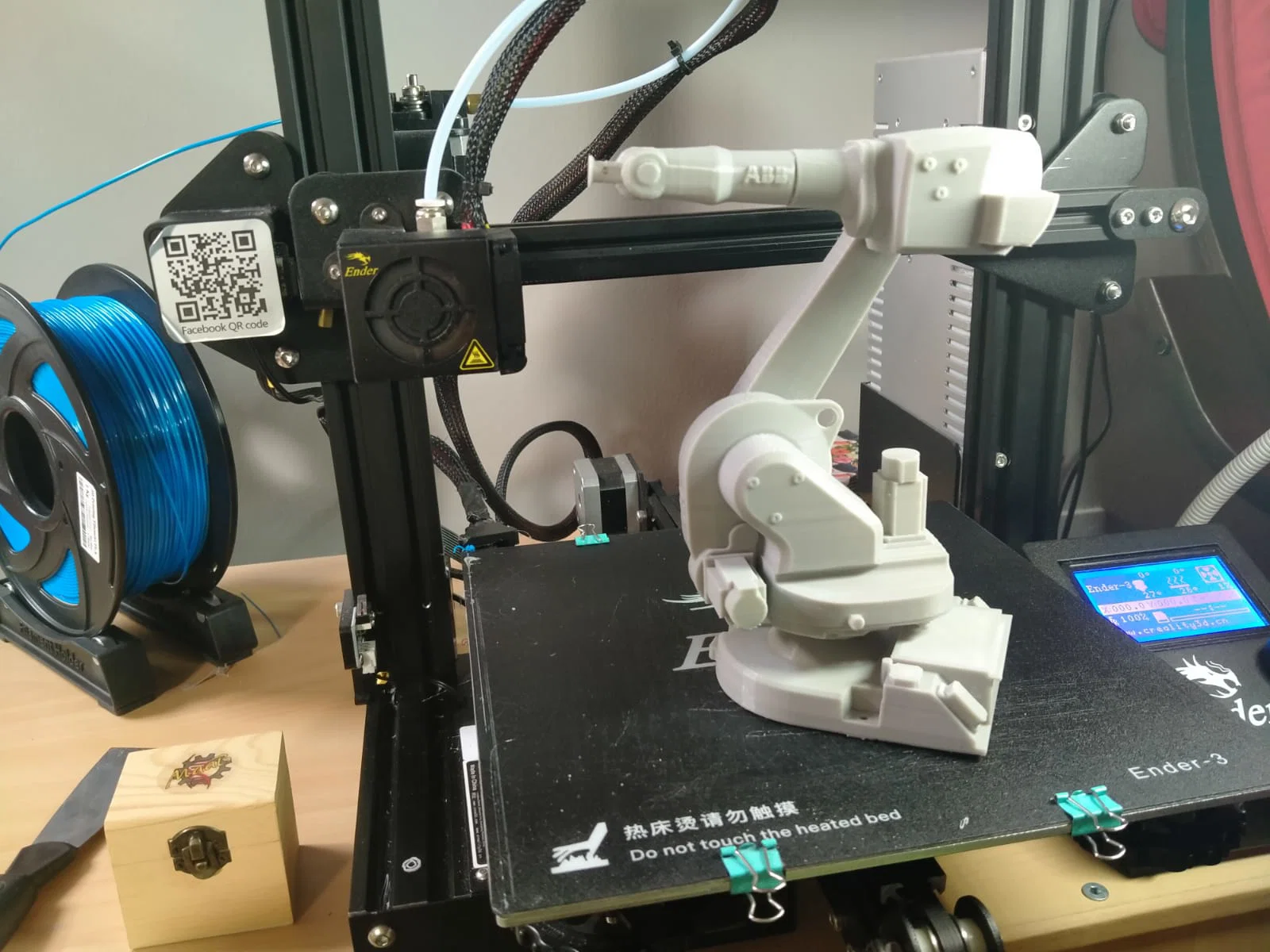
Khám phá ngay mô hình robot công nghiệp ABB IRB 1600 thu nhỏ dành riêng cho cộng đồng yêu thích in 3D. Đây là phiên bản mô phỏng chi tiết, cho phép bạn tự in và lắp ráp thành một cánh tay robot có khả năng chuyển động linh hoạt nhờ hệ thống dây thun kết nối các trục khớp. Với thiết kế tinh xảo và cấu trúc các bộ phận tách rời, mô hình này không chỉ là vật trang trí bàn làm việc ấn tượng mà còn là công cụ giáo dục trực quan về cơ khí. Sản phẩm hoàn hảo cho những ai muốn tìm hiểu về cấu tạo robot thực tế. Hãy chuẩn bị máy in 3D của bạn với chất liệu PLA và bắt tay vào thực hiện dự án lắp ráp đầy thú vị này ngay hôm nay để sở hữu một chiếc cánh tay robot mini độc đáo trên bàn làm việc của mình.








Mô tả
Mô hình robot công nghiệp ABB IRB 1600
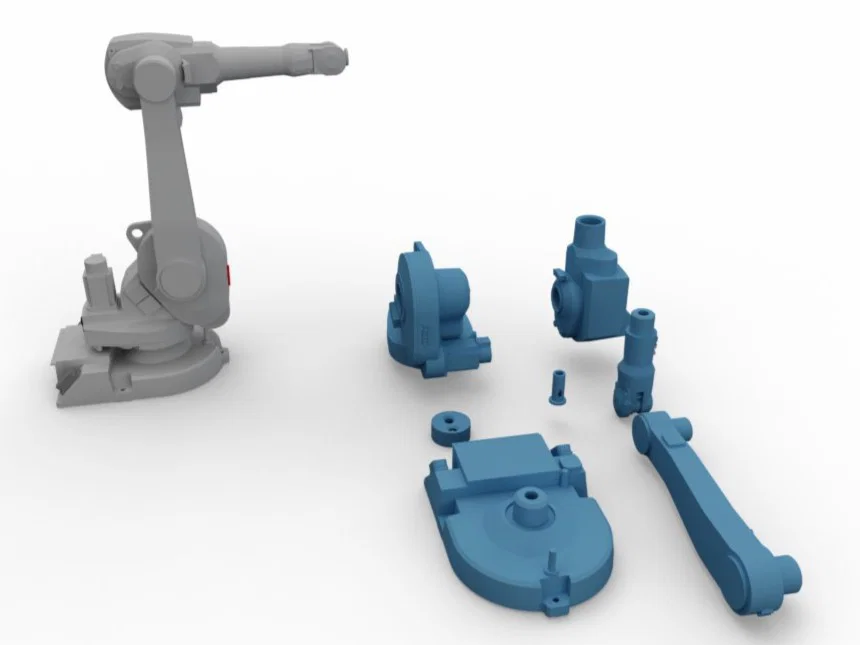
Nếu bạn là một người đam mê công nghệ, kỹ thuật hoặc đang tìm kiếm một mô hình trang trí bàn làm việc mang phong cách công nghiệp mạnh mẽ, thì mô hình robot ABB IRB 1600 này chắc chắn sẽ làm bạn hài lòng. Đây là phiên bản mô phỏng thu nhỏ đầy chi tiết của dòng cánh tay robot nổi tiếng từ hãng ABB, mang đến cái nhìn trực quan về cơ cấu vận hành phức tạp của các loại robot trong dây chuyền sản xuất hiện đại. Với thiết kế chia thành các phần riêng biệt, mô hình không chỉ là vật trưng bày mà còn là một dự án lắp ráp thú vị cho những người yêu thích 3D printing.
Việc in và lắp ráp mô hình này mang lại trải nghiệm rất gần gũi với thực tế. Các chi tiết được thiết kế tách rời giúp người dùng dễ dàng in ấn bằng máy in 3D FDM phổ thông. Điểm độc đáo của mô hình này nằm ở khả năng tương tác; sau khi in xong, bạn có thể kết nối các trục khớp lại với nhau bằng dây thun, tạo nên sự chuyển động linh hoạt cho cánh tay robot. Đây là món đồ chơi giáo dục tuyệt vời giúp trẻ em hoặc những người mới bắt đầu tìm hiểu về cơ khí học hỏi được cách vận hành của các trục xoay robot.
Để đạt được kết quả in 3D ưng ý nhất cho mô hình robot ABB IRB 1600 này, bạn hãy tham khảo một số gợi ý dưới đây:
- Chất liệu in: PLA là lựa chọn tối ưu vì độ ổn định, ít co ngót và dễ in cho các chi tiết nhỏ.
- Cài đặt in: Sử dụng chiều cao lớp in (layer height) từ 0.12mm đến 0.16mm để các chi tiết khớp nối đạt độ mịn tốt nhất.
- Hỗ trợ (Support): Do có nhiều chi tiết khớp xoay, bạn cần thiết lập support hợp lý tại các vị trí lỗ chốt để tránh làm hỏng bề mặt lắp ráp.
- Hậu kỳ: Sau khi in, hãy dùng giấy nhám mịn để xử lý các vết support dư thừa giúp các khớp nối vận hành trơn tru hơn.
- Cơ chế vận hành: Sử dụng dây thun nhỏ có độ đàn hồi tốt để liên kết các trục nội bộ, giúp cánh tay giữ được vị trí sau khi tạo dáng.
- Độ chính xác: Nên kiểm tra dung sai (tolerance) của các lỗ chốt trước khi in hàng loạt để đảm bảo các bộ phận vừa khít với nhau.
Đây thực sự là một dự án nhỏ nhưng đầy tính nghệ thuật và kỹ thuật, rất phù hợp để làm quà tặng hoặc để làm sinh động hơn cho góc làm việc của các kỹ sư tương lai.
Giấy phép

File mô hình










Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!