Omnidirectional XRP Robot

Cải tiến khung gầm XRP với hệ thống swerve drive linh hoạt. Hỗ trợ cả hai cấu hình differential và coaxial, giữ nguyên kích thước và các linh kiện gốc giúp việc lắp ráp dễ dàng hơn cho người chơi robot.





Mô tả
Đây là khung gầm XRP đã được cải tiến với các mô-đun swerve drive.
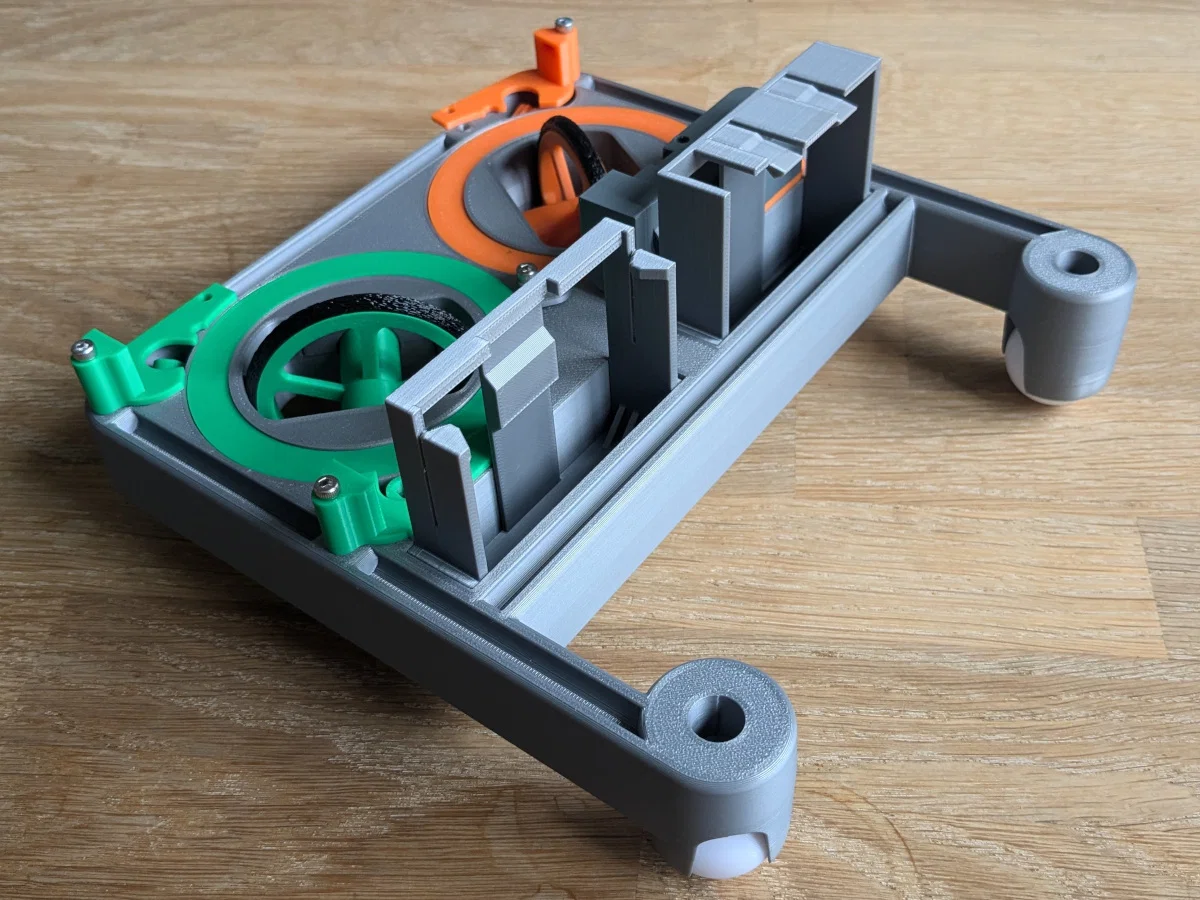
Mình đã cố gắng giữ lại hầu hết các tính năng gốc của XRP để kích thước và các thanh gắn vẫn giữ nguyên. Cả pin và bộ điều khiển đều được lắp vào khung như bản gốc (tuy nhiên là theo chiều dọc), còn vòng đệm (o-ring) và mô-tơ thì vẫn y hệt.
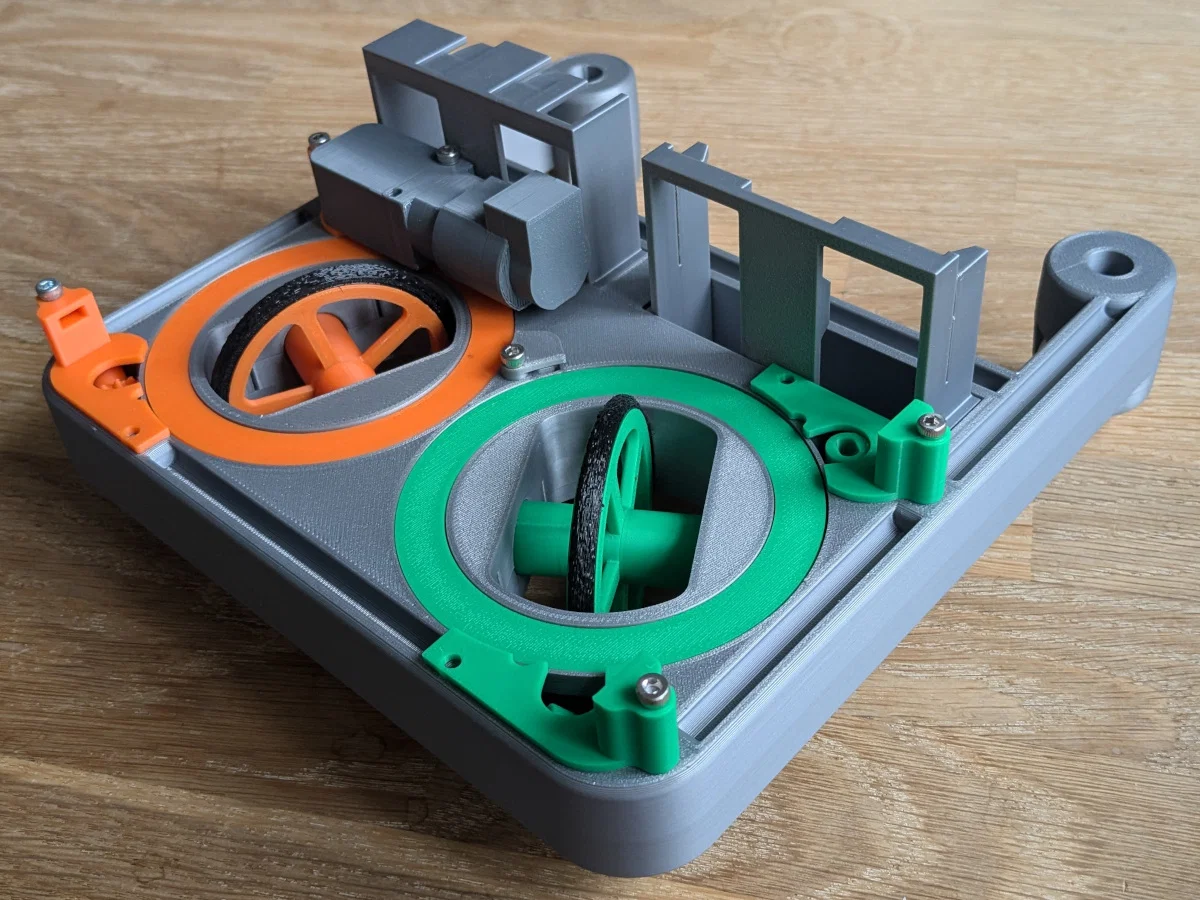
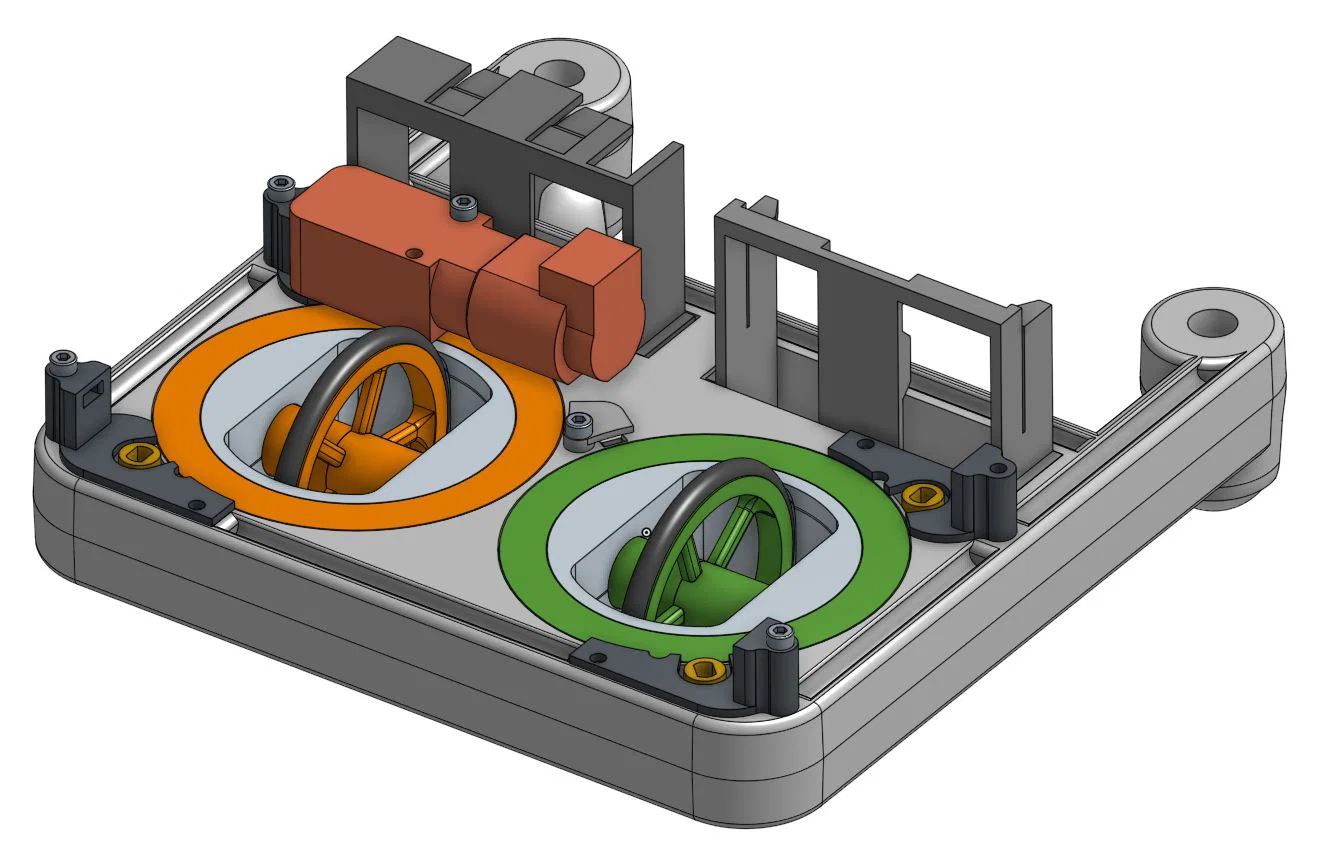
Cơ chế swerve drive cho phép bánh xe xoay và đổi hướng bằng cách sử dụng hai mô-tơ cố định. Chuyển động quay của mô-tơ được truyền tới cụm bánh xe thông qua hai bánh răng xoay quanh bánh xe. Mẫu thiết kế này có cả phiên bản differential swerve (màu cam) và coaxial swerve (màu xanh lá). Nhìn bên ngoài các mô-đun này giống nhau nhưng cách điều khiển lại khác biệt.
Để hiểu rõ hơn về mô-đun differential, bạn có thể xem video này:
Phiên bản coaxial thì khác biệt ở chỗ bánh răng lớn phía dưới không có răng ở mặt trong. Do đó, bánh răng phía dưới không khớp với trục bánh xe mà thay vào đó, nó có một cái chốt khóa bánh răng vào trục trung tâm (màu xám). Điều này có nghĩa là bánh răng phía dưới điều khiển trực tiếp góc xoay của bánh xe, trong khi bánh răng phía trên điều khiển chuyển động quay của bánh xe. Hình ảnh cắt ngang bên dưới cho thấy cách bánh răng phía dưới khóa vào trục trung tâm:

In ấn
Bảng dưới đây tóm tắt số lượng linh kiện bạn cần in. Hầu hết các chi tiết có thể in mà không cần support, nhưng mình khuyên bạn nên dùng tree support cho chassis và hub-bottom.
| Chi tiết | Số lượng (Differential) | Số lượng (Coaxial) |
|---|---|---|
| chassis | 1 | 1 |
| gear-differential | 4 | 2 |
| gear-coaxial | 0 | 2 |
| hub-bottom | 2 | 2 |
| hub-top | 2 | 2 |
| gear-bottom-small | 2 | 2 |
| gear-top-small | 2 | 2 |
| wheel-gear | 2 | 2 |
| wheel-axle | 2 | 2 |
| kit-motor-mount-a | 2 | 2 |
| kit-motor-mount-b | 2 | 2 |
| cover-sensor | 1 | 1 |
| mount-battery | 1 | 1 |
| mount-pcb | 1 | 1 |
Lưu ý rằng sự khác biệt duy nhất giữa cấu hình differential và coaxial nằm ở các bánh răng. Với bản coaxial, bánh răng dưới sẽ khác so với bản differential.
Tất cả các tệp mô hình đều được cung cấp ở định dạng STL và STEP. Bạn chỉ cần chọn một định dạng là đủ, nhưng file STEP sẽ dễ chỉnh sửa và in đẹp hơn.
Các linh kiện khác
Nếu bạn đã có robot XRP và muốn thử nghiệm với swerve drive, bạn chỉ cần thêm một vài linh kiện ngoài các chi tiết đã in:
| Chi tiết | Số lượng |
|---|---|
| Vít lục giác M3x16 | 9 |
| Vít lục giác M3x20 | 4 |
| Vít lục giác M3x35 | 6 |
| Cảm biến Hall A3144 | 2 |
| Nam châm trụ 4x5mm | 2 |
Các chi tiết in nghiêng chỉ cần thiết nếu bạn muốn tự động cân chỉnh hướng bánh xe. Ngoài ra, bạn cần tận dụng các linh kiện XRP cũ: 4 mô-tơ, 4 vòng đệm o-ring, 2 viên bi castor, bộ điều khiển và pin.
Lắp ráp
- Gắn wheel-axle với wheel-gear bằng vít M3x35. Đừng quên lắp thêm o-ring.

- Mình khuyên bạn nên bôi trơn các chi tiết chuyển động khi lắp ráp, mình đã dùng mỡ lithium cho việc này.
- Cụm bánh xe được gắn vào gear-differential phía trên và hub-top.

- Lật ngược chassis để đáy hướng lên trên, đặt cụm vừa lắp vào:

- Vẫn làm từ phía dưới, gắn hub-bottom vào gear-differential thứ hai, cố định các phần dưới với phần trên bằng 4 vít M3x16. Nếu bạn muốn tự động cân chỉnh bằng cảm biến Hall, hãy dán thêm nam châm 4x5mm vào.

- Làm từ phía trên, gắn kit-motor-mount-a vào mô-tơ, thêm gear-bottom-small vào trục mô-tơ. Trượt cụm mô-tơ từ bên cạnh vào, cố định bằng một vít M3x20 và một vít M3x35.

- Mô-tơ còn lại lắp tương tự nhưng sử dụng kit-motor-mount-b và gear-top-small.
- Lặp lại cho bánh xe thứ hai. Như đã giải thích ở trên, bạn có thể dùng gear-coaxial cho bánh răng phía dưới nếu muốn dùng cấu hình coaxial.
- Cuối cùng, lắp mount-battery và mount-pcb. Với tính năng tự động cân chỉnh, bạn có thể đặt 2 cảm biến Hall A3144 vào lỗ trên chassis và cố định bằng cover-sensor cùng một vít M3x16.

Nếu bạn có remix mô hình này và chia sẻ công khai, hãy cân nhắc tải lên các tệp chỉnh sửa ở định dạng như STEP. Điều này giúp mọi người khác dễ dàng cải tiến thiết kế của bạn hơn.
Giấy phép

File mô hình














Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!