OTTO SMART DOCK - Trạm sạc tự hành cho Otto Robot

Trạm sạc tự động cho Otto Robot với khả năng tự quay về nạp năng lượng. Dự án có 2 phiên bản: tiêu chuẩn và phiên bản thông minh tích hợp IoT (Home Assistant) để quản lý pin cho robot một cách tự động và chuyên nghiệp.










Mô tả
Cách đây vài ngày, nhờ vào Printables, mình đã tìm thấy Otto và biết ngay đây sẽ là người bạn đồng hành hoàn hảo trên bàn làm việc. Tuy nhiên, việc phụ thuộc vào dây sạc đã hạn chế "cuộc sống" của cậu ấy. Dù là người mới trong lĩnh vực in 3D và thiết kế, mình đã phát triển hệ sinh thái sạc này để mang lại sự tự do cho người bạn nhỏ: một dock tự hành nơi Otto có thể tự lo liệu việc sạc pin cho chính mình.

Mình xin giới thiệu dự án này với hai phiên bản:
- Phiên bản Tiêu chuẩn: Một dock sạc thụ động, chức năng đầy đủ và tối giản.
- Phiên bản IoT (Pro): Một trụ điều khiển thông minh tích hợp ESP32-C3 SuperMini, cho phép chúng ta kết nối Otto và việc sạc pin vào hệ thống nhà thông minh (Home Assistant).
1. Kiến trúc truyền tải năng lượng
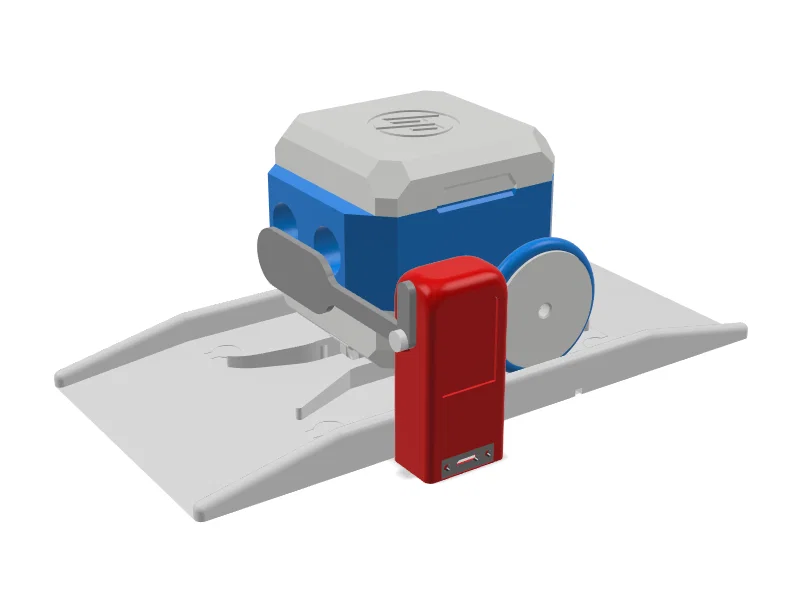
Thay vì các hệ thống sạc bằng trọng lực hoặc nam châm, mình đã áp dụng cơ chế tiếp xúc bên bằng các lá kẽm hình bầu dục. Để đảm bảo thành công trong mỗi lần cập bến, đường dốc không chỉ là bề mặt phẳng mà còn tích hợp hệ thống hình học hội tụ:


- Đầu vào mở rộng: Phần đầu đường dốc có các thanh dẫn hướng loe rộng hoạt động như một cái phễu. Điều này cho phép dù Otto có bị lệch góc nhẹ, các bức tường vật lý vẫn "ép" cậu ấy vào giữa một cách nhẹ nhàng.
- Điều chỉnh tiệm tiến: Khi robot tiến về phía trụ sạc, kênh sẽ hẹp lại vừa khít với khung gầm. Điều này đảm bảo các lá kẽm luôn thẳng hàng với đường ray sạc mà không cần người dùng phải lập trình độ chính xác đến từng milimet.
- Giảm ma sát: Góc của các bức tường được thiết kế để giảm thiểu sự cọ xát của nhựa, cho phép mô-men xoắn từ động cơ của Otto đủ để vượt qua dốc ngay cả khi pin yếu.
- Hiệu ứng lò xo: Độ đàn hồi của kim loại tạo áp lực liên tục lên thanh dẫn dốc.
- Tự làm sạch: Sự ma sát cơ học trong mỗi lần lắp vào đóng vai trò như tác nhân làm sạch, loại bỏ quá trình oxy hóa bề mặt và đảm bảo điện trở tiếp xúc thấp.
- Độ dung sai cao: Hình dạng bầu dục cho phép kết nối điện ngay cả khi robot không nằm hoàn toàn ở tâm.
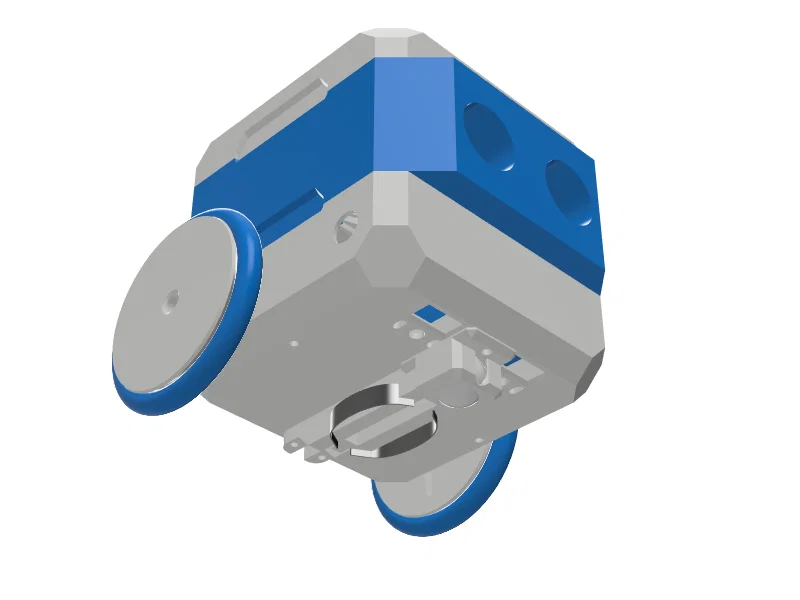
Chỉnh lưu thông minh (Không phụ thuộc cực tính)
Để hệ thống bền bỉ, thiết kế tích hợp cầu điốt Schottky (MB10S) vào khung gầm robot.
- Tự do định hướng: Dù Otto đi vào bằng mặt trước hay mặt sau, cầu điốt sẽ tự động chỉnh lưu đầu vào.
- Sụt áp thấp: Với công nghệ Schottky, chúng ta giảm thiểu mất mát điện áp, đảm bảo mô-đun sạc bên trong nhận đủ năng lượng để sạc pin 100%.
"Mẹo hiệu năng: Nên dùng củ sạc tường chất lượng cao (như của Raspberry Pi hoặc smartphone hiện đại) cung cấp 5.1V hoặc 5.2V. Điều này bù đắp cho sự sụt áp của cầu điốt và đảm bảo sạc nhanh, hiệu quả."
2. Trí thông minh IoT và Máy trạng thái (Phiên bản Pro)
Phiên bản nâng cao biến dock thành một nút trong ngôi nhà thông minh qua ESP32-C3 kết nối Home Assistant (qua MQTT/ESPHome).
MQTT là ngôn ngữ cho phép Otto và đế sạc "nói chuyện" với nhau mà không cần dây nối. Hãy tưởng tượng nó như một bảng thông báo kỹ thuật số: một bên đăng ghi chú (publish) và bên kia đọc nó (subscribe).
Các trạng thái của Otto:
- Trạng thái: Active / Roaming (Khám phá): Otto thực hiện chức năng bình thường, liên tục theo dõi điện áp pin (Vbatt).
- Trạng thái: Low Power Alert (Cảnh báo năng lượng): Khi pin xuống dưới ngưỡng an toàn (ví dụ 3.4V), Otto kích hoạt "Chế độ sinh tồn".
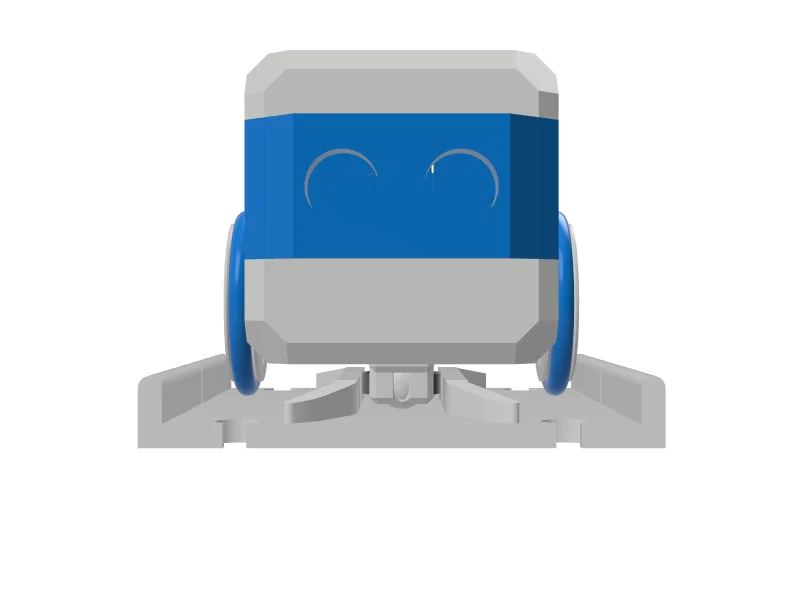
- Trạng thái: Homing / Search (Tìm kiếm căn cứ): Robot tìm kiếm cho đến khi cảm biến hồng ngoại (IR) phát hiện vạch đen dẫn hướng trên sàn.
- Trạng thái: Docking (Cập bến): Otto leo dốc và các lá kẽm tiếp xúc với thanh ray.
- Trạng thái: Charging (Sạc): ESP32-C3 phát hiện dòng tiêu thụ, rào chắn (servo SG90) đóng lại và đèn LED trạng thái đổi sang màu đỏ.
- Trạng thái: Full / Ready (Đã sạc đầy): Khi pin đầy hoặc nhận lệnh từ Home Assistant, trụ điều khiển mở rào chắn và ra hiệu cho Otto rời đi.
3. Danh sách vật liệu
- Cho Robot (Dùng chung)
- 1x Cầu chỉnh lưu MB10S (loại Schottky).
- 2x Lá kẽm làm điểm tiếp xúc.
- Dây điện mảnh (AWG 28).
- Đế sạc
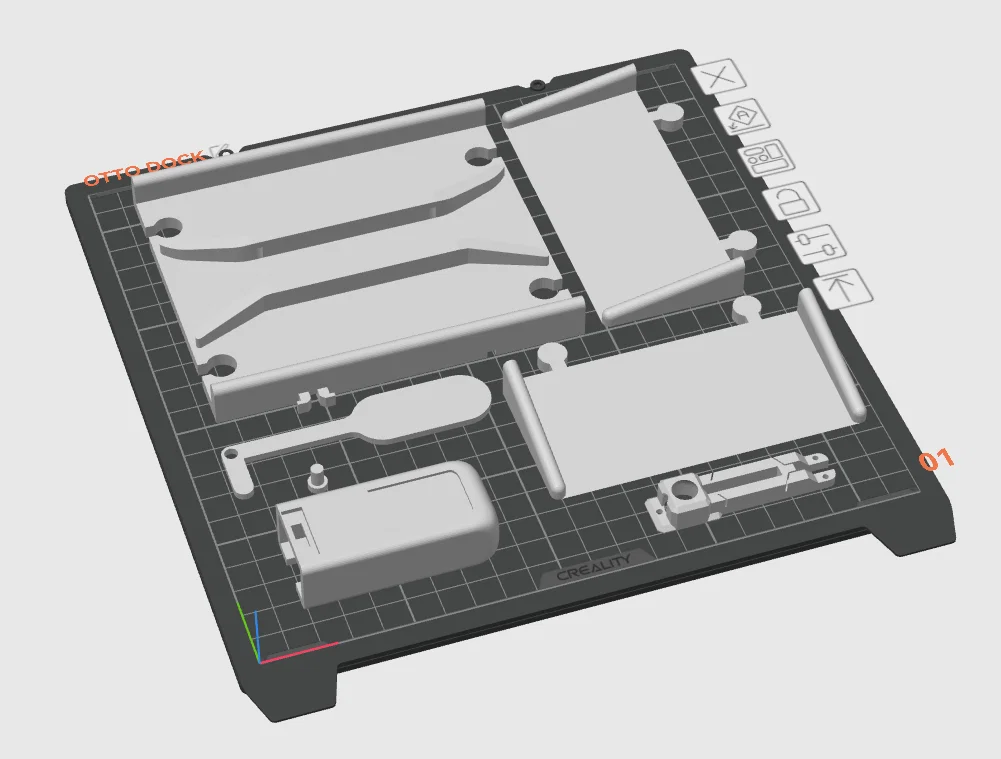
- Các bộ phận in 3D (STL đi kèm).
- Băng dính đồng hoặc dải đồng thau/kẽm rộng 5mm làm ray dẫn điện.
- Cáp USB-C hoặc Micro-USB và củ sạc 5V / 2A.
- Điện tử điều khiển (Chỉ bản Pro)
- 1x ESP32-C3 SuperMini.
- 1x Micro-servo SG90.
- 1x LED 5mm và điện trở 220 Ohm.
4. Hướng dẫn lắp ráp
Để lắp ráp cơ bản, bạn cần dán các lá đồng hoặc kẽm vào hai bên rãnh dốc, nối đầu dây vào đầu cắm USB-C của đế sạc. Dưới đế có kênh đi dây để giấu cáp gọn gàng.
Với phần tiếp xúc của Otto, hãy cắt các lá kim loại và lắp vào các khe được thiết kế dưới chân robot. Đảm bảo chúng có độ đàn hồi để ép sát vào ray dẫn điện. Đừng quên lắp cầu điốt để bảo vệ mạch khỏi phân cực ngược.


Lưu ý về vạch dẫn hướng: Hãy sử dụng băng dính đen nhám (matte black) dán ở giữa đường dốc, kéo dài ra ngoài khoảng 15cm. Độ rộng lý tưởng là 15-18mm để cảm biến hồng ngoại của Otto bắt tín hiệu chính xác.
5. Mẹo in ấn
Các bộ phận có thể in mà không cần support nếu đặt đúng hướng. Nên sử dụng chiều cao lớp 0.12mm hoặc 0.20mm. Hãy chọn nhựa màu sáng cho đường dốc để tạo độ tương phản tốt nhất cho vạch đen dẫn hướng.
Đây là dự án mở dành cho cộng đồng. Mình rất mong các bạn có kinh nghiệm in ấn và lập trình có thể cùng thử nghiệm và tinh chỉnh để Otto trở nên hoàn thiện hơn. Hãy cùng làm cho Otto thực sự tự lập nhé!
Giấy phép

File mô hình











Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!