Bàn tay cơ khí in 3D cho robot EZ-Robot JD (Mechanical Robot Hand)

Nâng cấp chú robot EZ-Robot JD của bạn với mô hình bàn tay cơ khí (Mechanical Robot Hand) được in 3D độc đáo. Đây là dự án lý tưởng dành cho những người đam mê công nghệ và robot học, giúp chú robot JD của bạn tăng cường khả năng cầm nắm và mô phỏng cử động chân thực hơn. Thiết kế bàn tay được tối ưu hóa để lắp ráp dễ dàng với hệ thống servo của dòng robot JD, mang lại sự linh hoạt tối đa khi lập trình. Bạn có thể tự in tại nhà với chất liệu nhựa PLA hoặc PETG để có độ bền tốt nhất. Hãy bắt tay vào in và lắp ráp ngay hôm nay để trải nghiệm sự thú vị khi nhìn chú robot của bạn thực hiện các cử động bàn tay đầy sống động, làm phong phú thêm các dự án STEM của chính mình.
Mô tả
Mô hình bàn tay cơ khí cho robot EZ-Robot JD
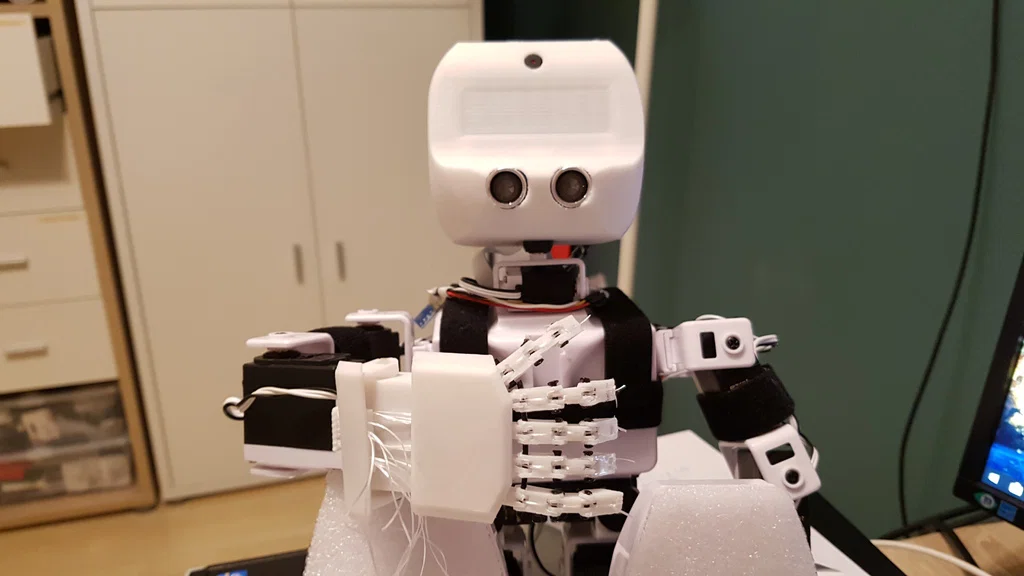
Nếu bạn đang sở hữu một chú robot JD từ thương hiệu EZ-Robot và muốn nâng cấp khả năng tương tác của nó, mô hình bàn tay cơ khí (Mechanical Robot Hand) này chính là mảnh ghép hoàn hảo mà bạn đang tìm kiếm. Bàn tay này được thiết kế chuyên biệt để lắp đặt vào các cánh tay robot JD hiện có, giúp chú robot của bạn trở nên linh hoạt hơn trong việc thực hiện các thao tác cầm nắm mô phỏng. Đây là một dự án in 3D tuyệt vời dành cho những ai đam mê robot học, muốn tìm tòi và tự tay lắp ráp các bộ phận chuyển động cho sản phẩm công nghệ của mình.
Việc tích hợp thêm bàn tay cơ khí không chỉ làm tăng tính thẩm mỹ cho chú robot JD mà còn mở ra nhiều cơ hội thử nghiệm các lập trình chuyển động phức tạp. Thay vì chỉ sử dụng cánh tay cơ bản, giờ đây bạn có thể cấu hình để robot thực hiện các hành động gắp vật nhẹ, chào hỏi hoặc mô phỏng các cử động của bàn tay người. Thiết kế của mô hình tập trung vào sự tinh gọn, các khớp nối được tính toán kỹ lưỡng để dễ dàng lắp ráp cùng với hệ thống servo hiện có trên robot, đảm bảo sự ổn định trong suốt quá trình hoạt động.
Để đảm bảo quá trình in 3D diễn ra suôn sẻ và đạt kết quả tốt nhất, bạn cần lưu ý một số điểm sau đây:
- Chất liệu in: Khuyến khích sử dụng nhựa PLA hoặc PETG vì độ bền cao và ít bị co ngót, giúp các chi tiết khớp nối hoạt động trơn tru.
- Thiết lập in: Nên sử dụng layer height từ 0.12mm đến 0.2mm để đảm bảo độ chi tiết cho các khớp nhỏ, giúp chuyển động của bàn tay mượt mà nhất.
- Hỗ trợ (Support): Do cấu tạo có nhiều khớp nối, bạn cần sử dụng thêm support khi in để đảm bảo các hốc lắp ráp không bị biến dạng.
- Kiểm tra khớp: Sau khi in xong, hãy làm sạch bề mặt và kiểm tra độ linh hoạt của từng khớp nối trước khi gắn dây cáp điều khiển.
- Độ bền: Không nên ép robot nâng vật quá nặng để tránh gây hư hại cho các bộ phận bằng nhựa và hệ thống servo đi kèm.
- Tùy chỉnh: Bạn có thể linh hoạt sơn màu hoặc trang trí thêm để làm nổi bật phong cách riêng cho chú robot của mình.
Đây là một dự án in 3D mang tính ứng dụng cao, giúp bạn hiểu rõ hơn về cơ chế vận hành của cánh tay robot và nâng tầm trải nghiệm sáng tạo cùng robot JD của bạn.
Giấy phép

File mô hình


Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!