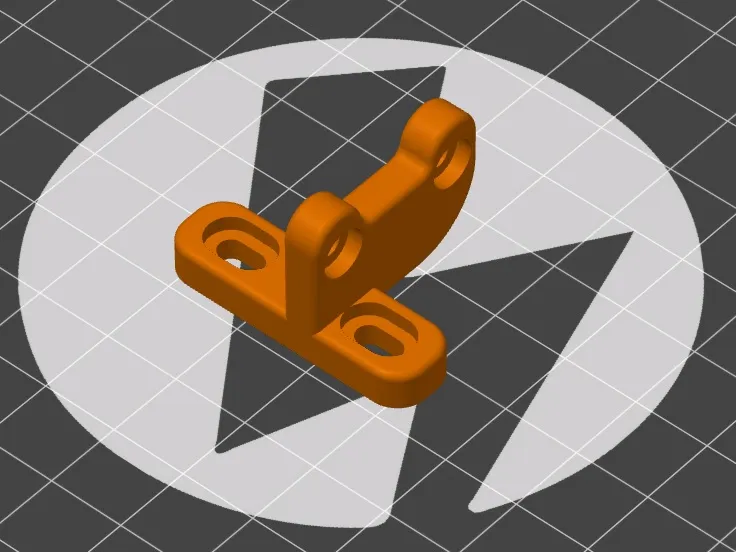
Giá đỡ BLTouch/CR Touch cho máy in SV06

Thay thế vấn đề quy nạp chứng khoán bằng một bltouch hoặc cr chạm bằng giá treo này.




Mô tả
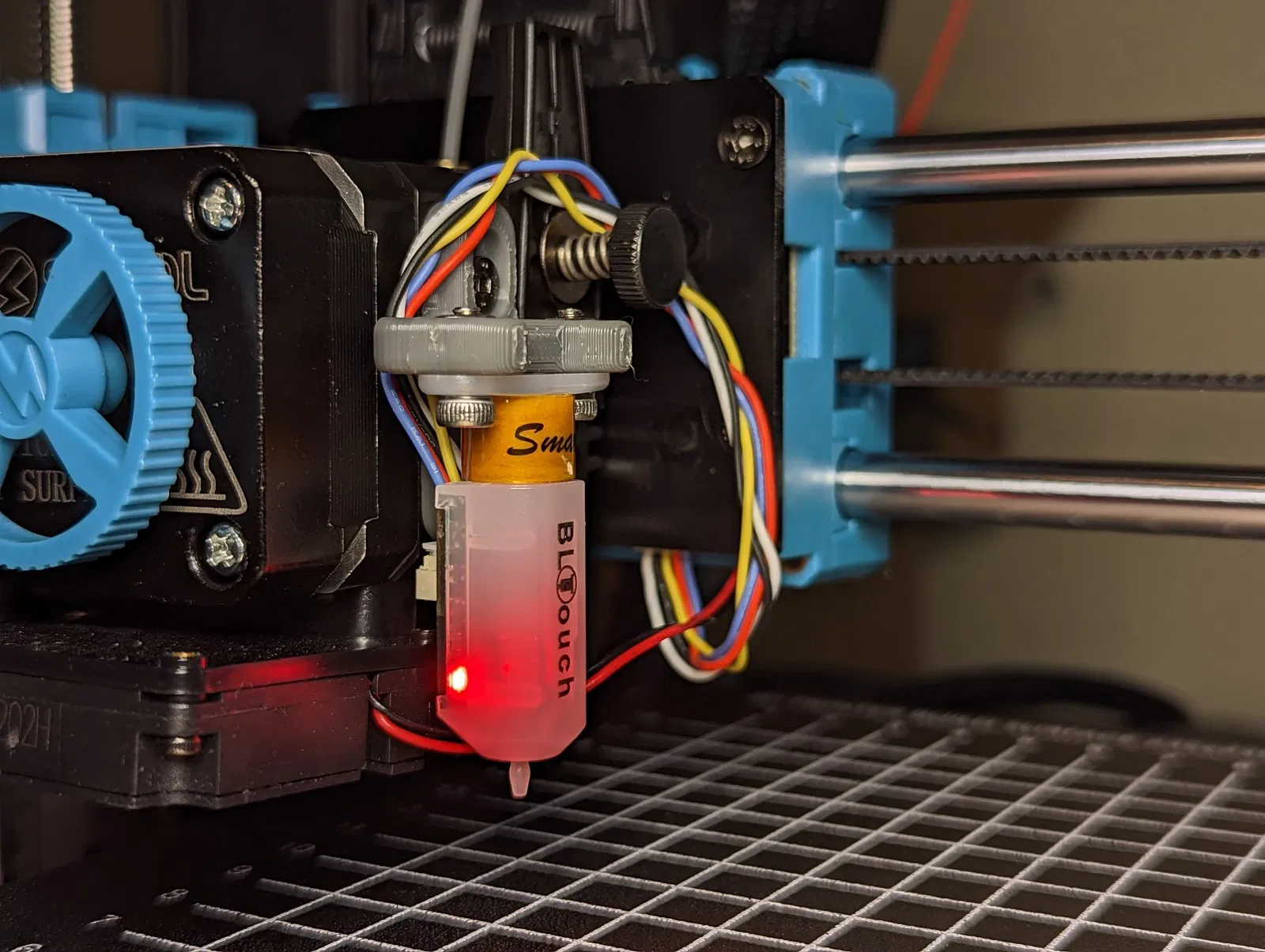
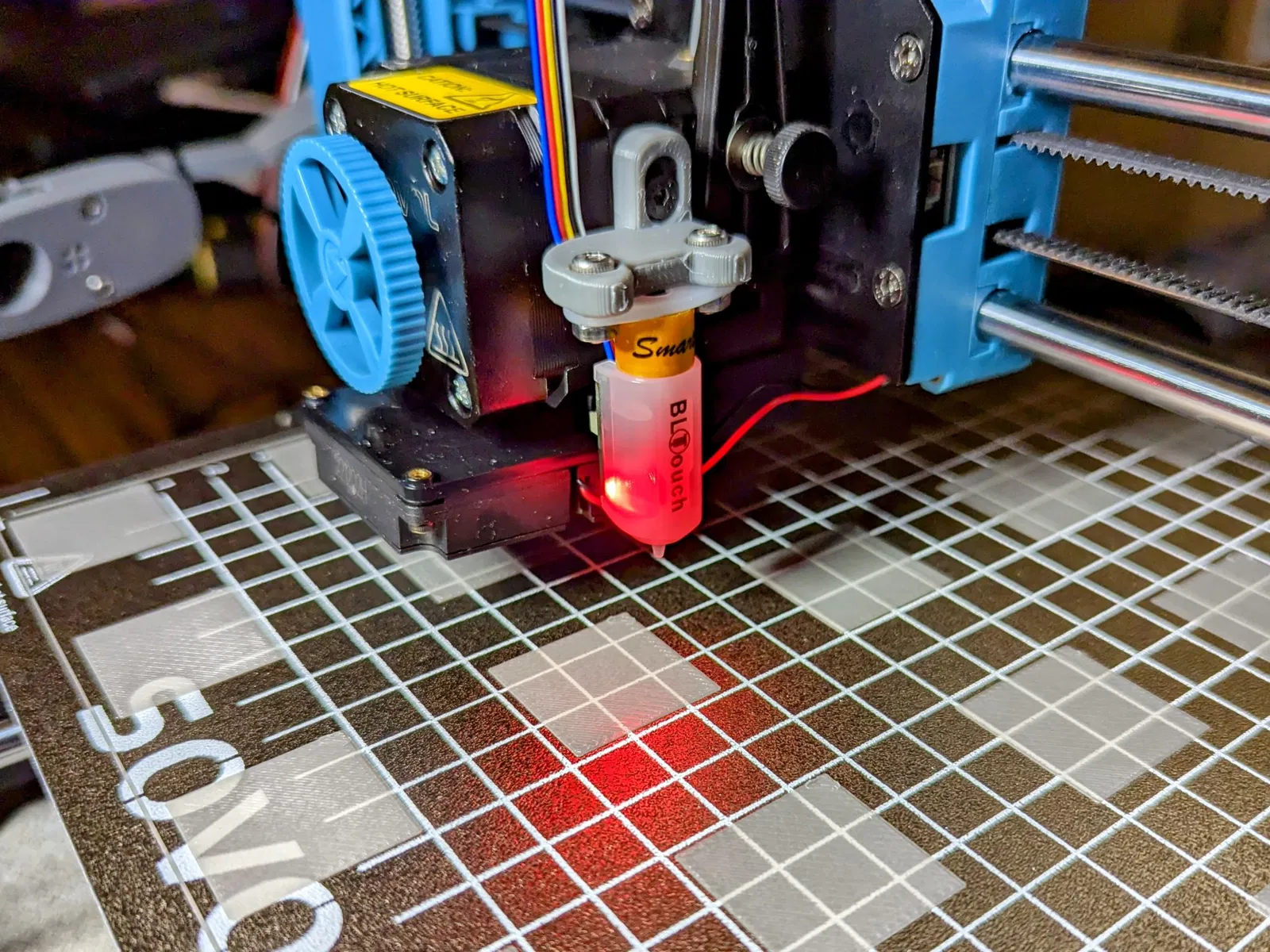
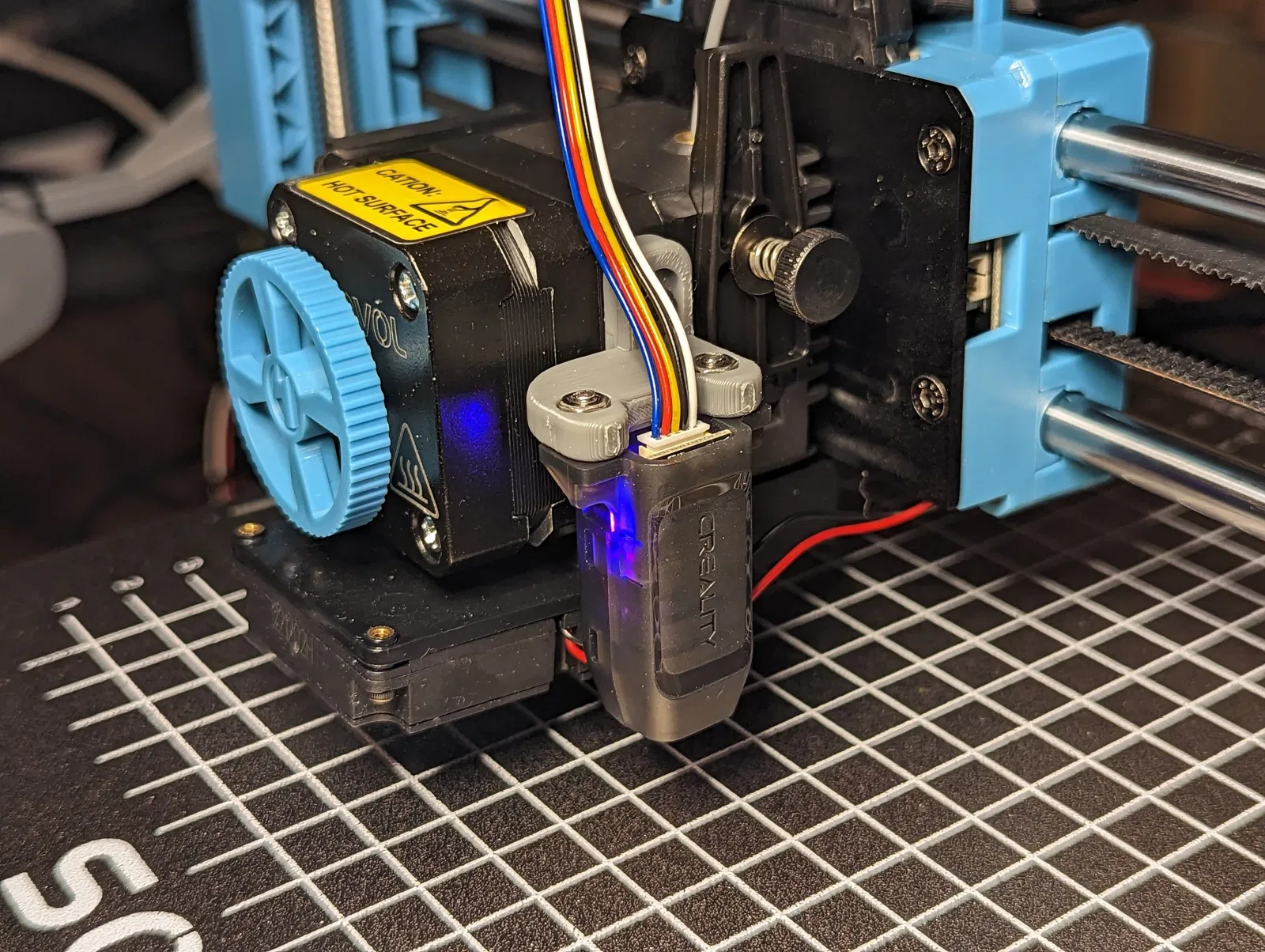
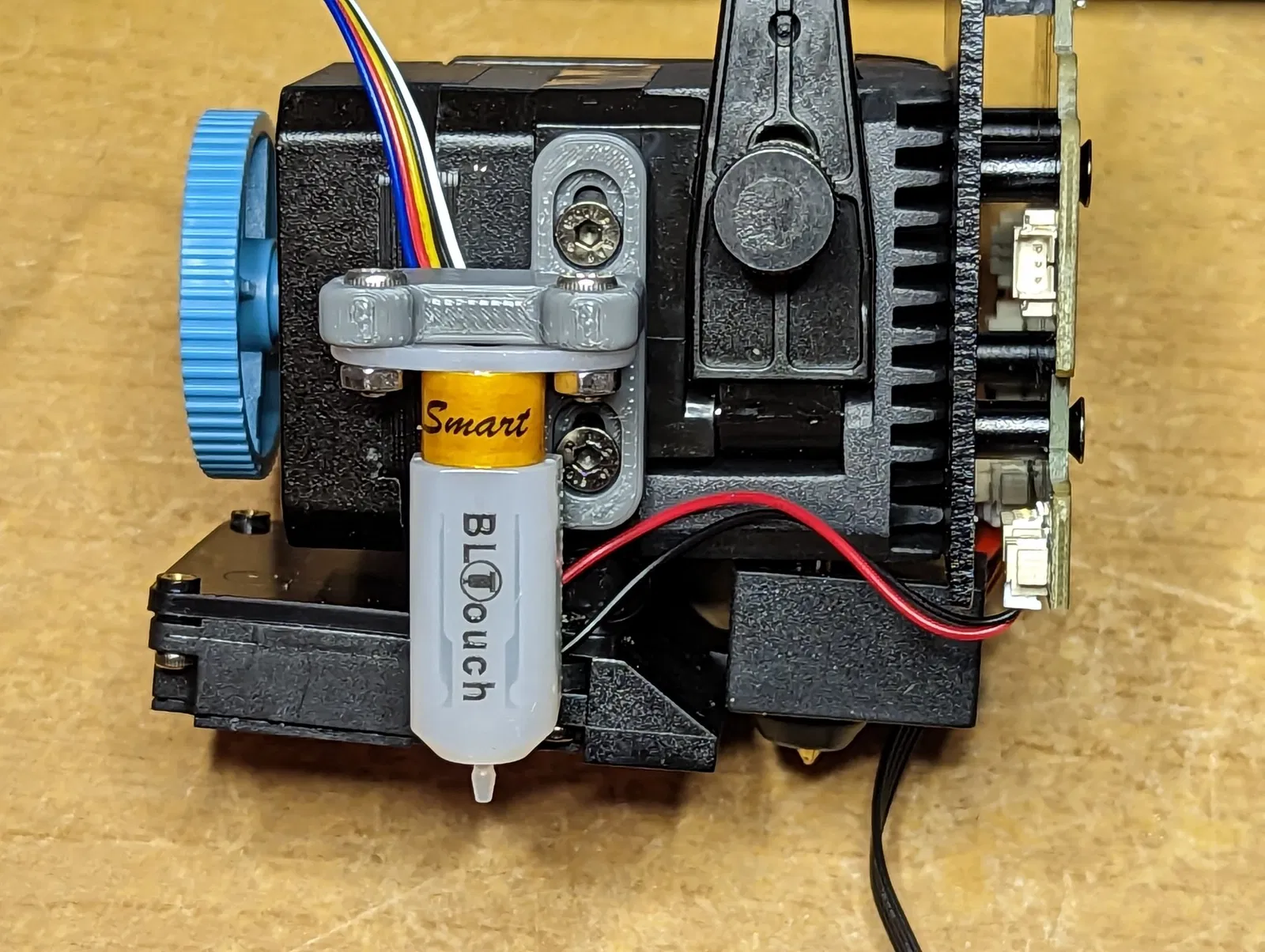
Đã thử nghiệm với cả BLTouch và CR Touch. Xem ảnh cho cả hai đã được gắn.
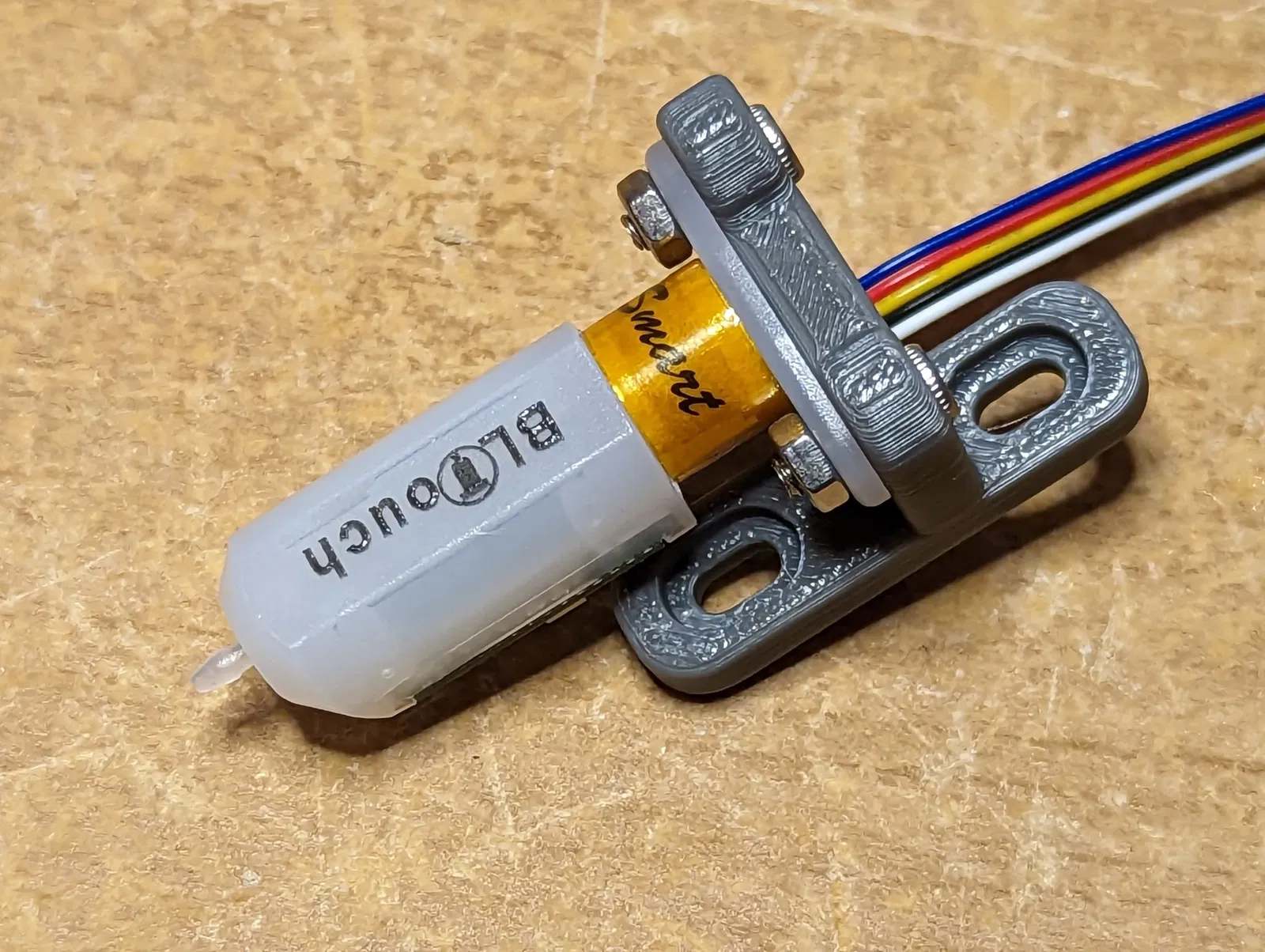
Các bộ phận cần thiết để gắn cảm biến chạm vào giá đỡ:
- 2x vít M3 8mm
- 2x đai ốc M3
Có vẻ dễ hơn khi đặt các đai ốc ở trên vào lỗ khoét và vặn cảm biến chạm từ dưới lên.
2x vít gắn giá đỡ cảm biến cảm ứng có thể được sử dụng lại.
In ấn:
- Bạn cần lật mô hình ngửa lên.
- Tôi đã sử dụng 15% độ đặc. Có vẻ hoạt động tốt.
- Có thể cần hỗ trợ.
Đi dây:
Có hai cách để kết nối cảm biến chạm với bo mạch chính của SV06.
Cách đầu tiên là sử dụng cáp đi kèm với cảm biến chạm và kết nối cảm biến chạm trực tiếp vào bo mạch chính bằng cách sử dụng nó. Bạn sẽ cần rút cáp hiện đang cắm vào “Cổng Công Tắc Gần” (xem trang 21 của hướng dẫn SV06 để tham khảo) và cắm cáp mới vào đó. Hai cáp tôi nhận được với BLTouch và CR Touch đều là cáp thẳng và không yêu cầu bất kỳ sửa đổi nào. Bạn vẫn nên kiểm tra lại để đảm bảo các chân cắm khớp chính xác ở cả hai đầu của cáp.
Cách thứ hai là kết nối cảm biến chạm với bảng phân tách trên đầu đùn bằng cách sử dụng cổng mà cảm biến cảm ứng gốc đã được cắm vào. Bạn sẽ cần 2x đầu nối cái JST 1.25 MX 5 chân + dây. Bạn có thể tự bấm hoặc mua một bộ đã được làm sẵn (liên kết đến bộ mà tôi đã mua bên dưới). Cáp không phải là cáp thẳng mà là cáp đảo. Nghĩa là chân 1 ở bên A = chân 5 ở bên B, chân 2 ở bên A = chân 4 ở bên B và cứ như vậy. Khi bạn đã làm xong cáp, hãy cắm nó vào và bạn sẽ ổn.
Dưới đây là bộ JST 1.25 MX mà tôi đã mua từ Amazon:
https://www.amazon.com/dp/B07S18D3RN
Cấu hình Klipper: Hoạt động với cả BLTouch và CR Touch
Tài liệu: https://www.klipper3d.org/BLTouch.html
Cấu hình cảm biến chạm mà tôi đang sử dụng trên bo mạch chính SV06 gốc.
[bltouch] sensor_pin: ^PB1 control_pin: PB0 x_offset: 29.5 y_offset: -28.5 z_offset: 0 # chạy lại probe_calibrate speed: 5.0 lift_speed: 100 samples: 2 sample_retract_dist: 2 samples_result: trung bình samples_tolerance: 0.01 samples_tolerance_retries: 5
Dưới đây là một vài tùy chọn khác để thay đổi do sự thay đổi trong độ lệch của đầu dò so với đầu dò cảm ứng tiêu chuẩn.
Trong phần [safe_z_home]:
home_xy_position: 83, 141
Trong phần [bed_mesh]:
mesh_min: 29.5, 28.5 mesh_max: 195.5, 196.5
Xin lỗi, tôi không chạy Marlin nhưng tôi chắc chắn ai đó sẽ phát hành firmware cho SV06 với hỗ trợ BLTouch/CR Touch sớm.
Sự khác biệt về trọng lượng ước tính:
- Đầu dò cảm ứng tiêu chuẩn: 27g
- BLTouch: 14g
- CR Touch: 18g
Trọng lượng bao gồm đầu dò, giá đỡ, dây + đầu nối và vít (trừ 2 vít kết nối giá đỡ với đầu đùn vì những cái đó giữ nguyên cho mỗi đầu dò đã lắp).
Bạn nên chọn cái nào?
Từ những gì tôi đã đọc, CR Touch chính xác hơn một chút nhưng có thể bạn sẽ không nhận thấy sự khác biệt trong các bản in của mình. Cả hai đều hoạt động cơ bản giống nhau. BLTouch sử dụng cảm biến hiệu ứng Hall để phát hiện chuyển động của đầu dò trong khi CR Touch sử dụng cảm biến quang học để phát hiện chuyển động của đầu dò. Về lý thuyết, cảm biến hiệu ứng Hall có thể bị ảnh hưởng bởi các trường từ bên ngoài trong khi cảm biến quang học thì không. Về đầu dò, BLTouch sử dụng một cái bằng nhựa trong khi CR Touch là kim loại và có tầm với dài hơn một chút. Tôi nghĩ sự khác biệt lớn là CR Touch nặng hơn khoảng 60% so với BLTouch, vì vậy nếu mục tiêu của bạn là làm cho đầu đùn của bạn nhẹ nhất có thể, thì BLTouch là lựa chọn tốt hơn.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình

Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!