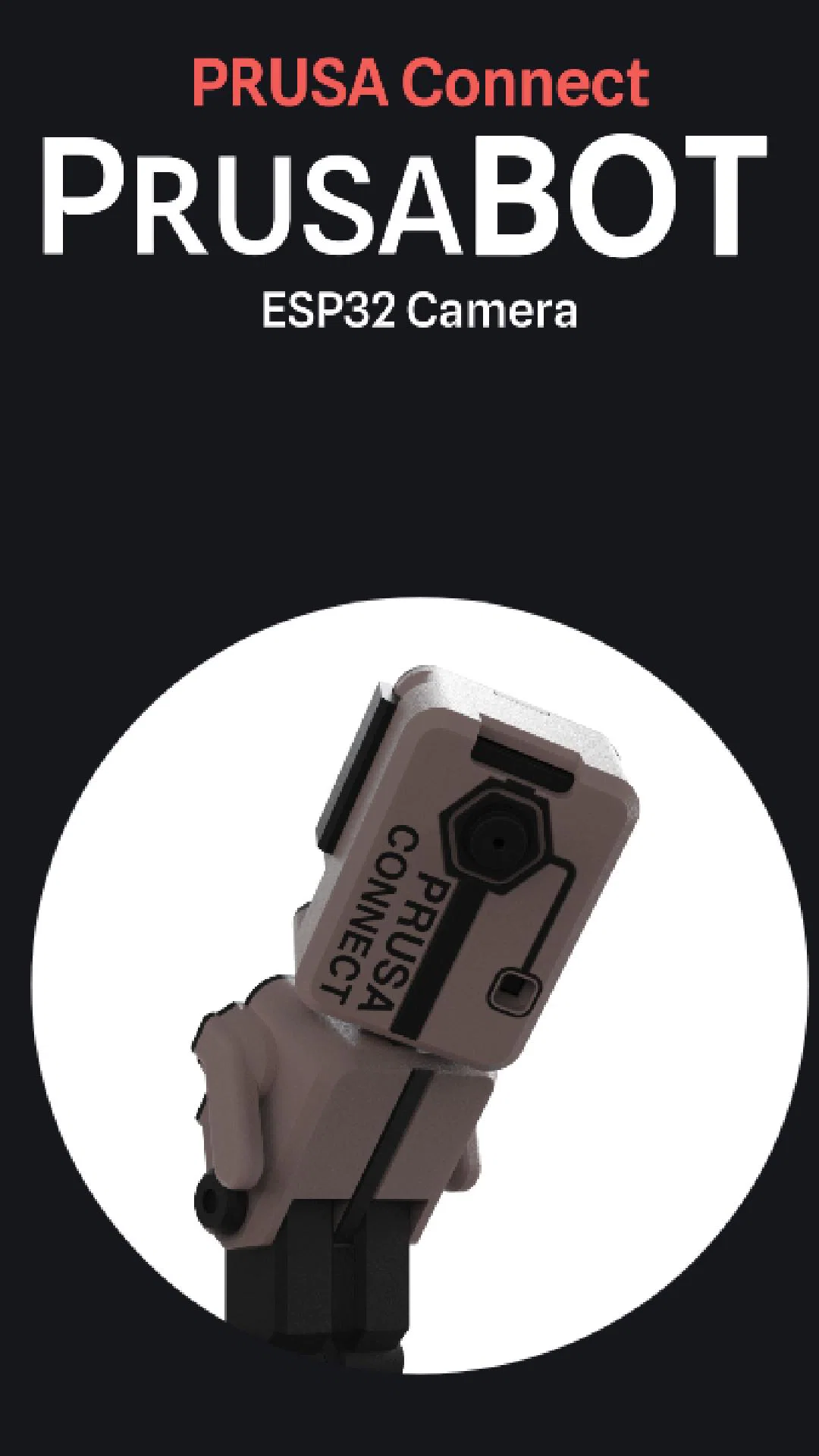
PrusaBot - Camera ESP32 cho Prusa Connect

PrusaBot ra đời, trở thành 'công nhân' đầu tiên hoạt động bên ngoài máy in. Đây là dự án kết hợp in 3D, điện tử và lập trình, tích hợp ESP32 Cam vào hệ sinh thái Prusa Connect một cách tiện lợi và đầy thú vị.

















Mô tả
Giới thiệu
Tôi vừa tạo thêm một món đồ chơi mới cho chiếc máy in PRUSA của mình, một chú robot, nhưng lần này không chỉ đơn thuần là đồ chơi. Hầu hết các dự án của tôi đều tập trung vào tính ứng dụng và thực tiễn. Lần này, tôi quyết định gọi nó là PrusaBot-Camera, một vi điều khiển ESP32 tích hợp hai mô-đun:
- Camera;
- WiFi với ăng-ten tối ưu.

Tôi đã tìm kiếm giải pháp này từ lâu và thử qua vài lựa chọn, trong đó có Beagle camera của Mintion (https://www.mintion.net/). Tuy nhiên, dù tính năng khá tốt nhưng nó lại thiếu kết nối với Prusa Connect mà tôi thực sự cần.
Thiết bị này có giá rất phải chăng và có thể dễ dàng tìm mua trên mạng. Loại tôi đang sử dụng có tên là ESP32-CAM.
Sau quá trình tìm kiếm, tôi đã tìm thấy video của Chris Riley trên Youtube. Anh ấy hướng dẫn từng bước rất đơn giản để thiết lập. Anh ấy cung cấp đầy đủ chi tiết để bất kỳ ai có kỹ năng máy tính cơ bản đều có thể thực hiện dự án này. (ĐỪNG LÀM NẾU CHƯA XEM VIDEO NÀY - RẤT QUAN TRỌNG).
Nếu cần thêm thông tin, hãy xem blog chính thức của Prusa tại: Development of the open-source camera firmware solution from the community for Prusa printers - Original Prusa 3D Printers
Dự án này kết hợp ba lĩnh vực:
- In 3D;
- Khoa học máy tính;
- Điện tử.
Đây là bài nhập môn cơ bản cho từng lĩnh vực. Có thể sau này bạn không còn dùng đến kết quả cuối cùng, nhưng tin tôi đi, bạn sẽ rất tận hưởng quá trình phát triển nó.
In 3D
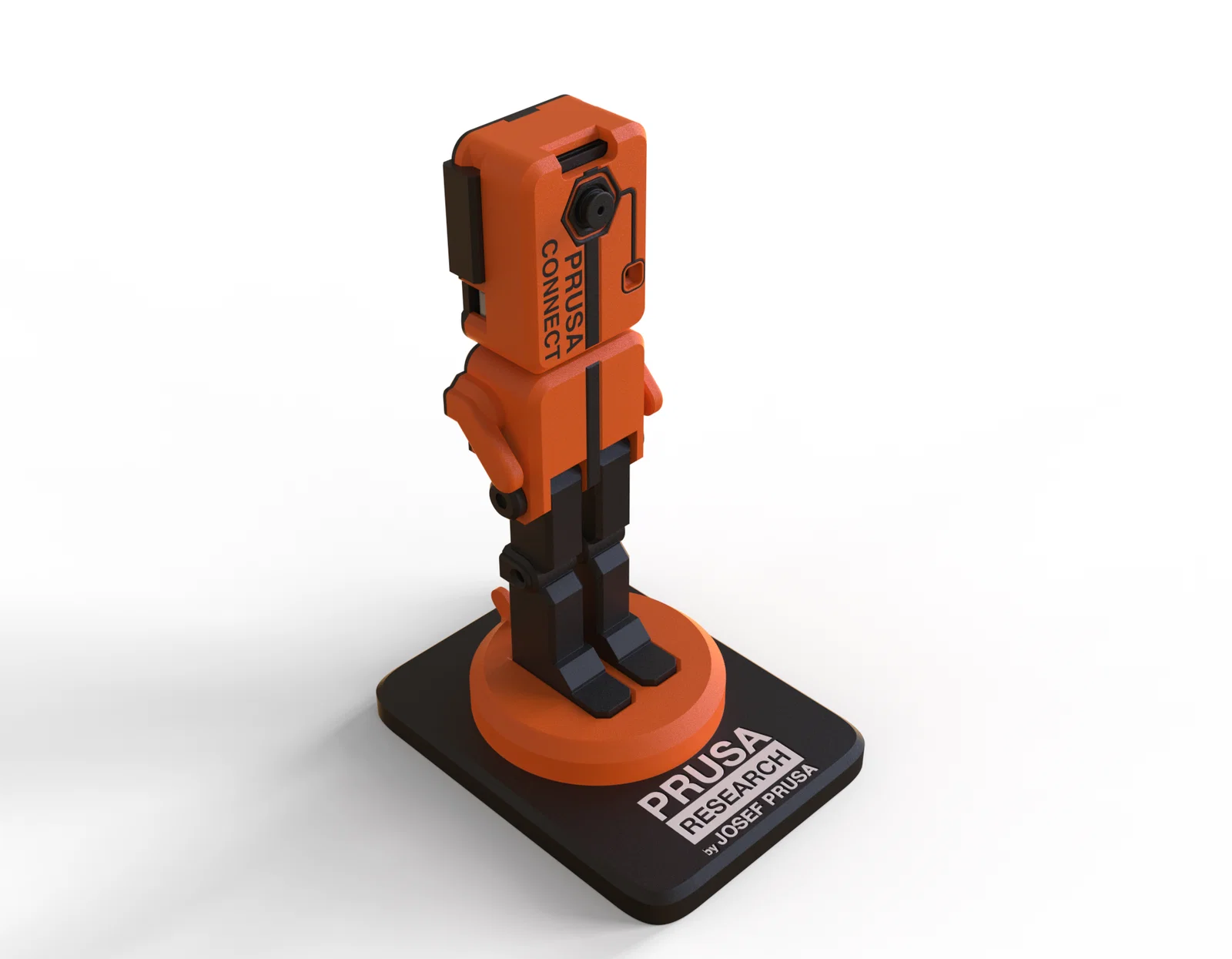
Tôi sẽ tập trung vào mảng in 3D. Ở giai đoạn đầu này, tôi cung cấp mô hình với các phần phối hai màu. Kết quả cuối cùng sẽ như hình minh họa và hiện tại đã được tối ưu cho những ai sử dụng MMU.

Như bạn thấy trong ảnh, PrusaBot có một số bậc tự do:
- Di chuyển đầu (hơi hạn chế do cáp micro USB);
- Khớp hông;
- Xoay ở phần đế.

Khi tháo phần đế hình trụ, chân của nó có thể hít vào bất kỳ bề mặt sắt từ nào, tạo thêm sự linh hoạt.
Một chút lịch sử phát triển dự án
Ban đầu, tôi chỉ định làm cái gì đó tương tự như Chris đã giới thiệu, nhưng sau khi hoàn thành, tôi nghĩ việc biến "mô-đun" đó thành một nhân vật hình người sẽ thú vị hơn.
Đó là cách PrusaBot ra đời, "công nhân" đầu tiên hoạt động bên ngoài máy in. Tôi rất thích ý tưởng về những chú robot hỗ trợ máy in và hy vọng một ngày nào đó sẽ thấy chúng trở nên phổ biến.
In 3D và lắp ráp
Nhựa in (Filament)
- PETG (tôi ưu tiên Prusament)
- Prusa Orange
- Galaxy Black
- White
- Nhựa dẻo (TPU)
Vật liệu khác
- Nam châm
- Keo dán: Kích thước của các lỗ nam châm không quá chính xác, nên tốt nhất là dùng thêm keo (Super Glue hoặc bất kỳ loại keo chắc chắn nào) để giữ chúng cố định.

Lưu ý cho người dùng Bambu Lab
Liệu dự án này có hữu ích cho các dòng máy của bạn không? Hãy để lại tin nhắn cho tôi biết nhé. Cảm ơn!
Nhật ký thay đổi
02/04/2024 - Thêm nắp lưng cho đầu với các lỗ thông khí giúp làm mát mô-đun.
Một thành viên lo ngại về nhiệt độ của các bộ ESP32 giá rẻ này, đặc biệt là trên mô-đun camera. Thực tế, chúng có thể hơi ấm lên. Tuy nhiên, camera PrusaBot được đặt nhô ra ngoài và khe cắm MicroSD cũng lộ ra ngoài, đóng vai trò như một bộ tản nhiệt. Cá nhân tôi đã chạy 24/24 và không thấy quá nóng, có lẽ nhờ các lỗ thông hơi trên "đầu" của PrusaBot.
Bạn sẽ thấy hai phần riêng biệt cho phía sau đầu: một phần có nhiều lỗ (active) và một phần không có lỗ (inactive). Tên file: PrusaBot_cam2.3mf
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — NoDerivativesCC-BY-NC-ND

File mô hình



Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!