Mô hình Robot vận chuyển Sci-Fi Articulated độc đáo cho in 3D

Khám phá dự án mô hình robot vận chuyển phong cách Sci-Fi đầy tiềm năng. Đây là thiết kế mô hình lắp ghép với khớp nối (articulated) linh hoạt, sử dụng các khớp cầu và hệ thống kết nối đuôi bồ câu chắc chắn. Dự án đang trong giai đoạn phát triển, cung cấp một nền tảng tuyệt vời cho những ai yêu thích thiết kế cơ khí và in 3D. Với thời gian in tối ưu và cấu trúc hiện đại, bạn có thể dễ dàng hiện thực hóa mô hình này bằng máy in 3D phổ thông. Hãy tải xuống để cùng khám phá và tiếp tục hoàn thiện chú robot vận chuyển độc đáo này theo phong cách riêng của bạn ngay hôm nay.


Mô tả
Mô hình Robot vận chuyển Sci-Fi Articulated (Đang phát triển)
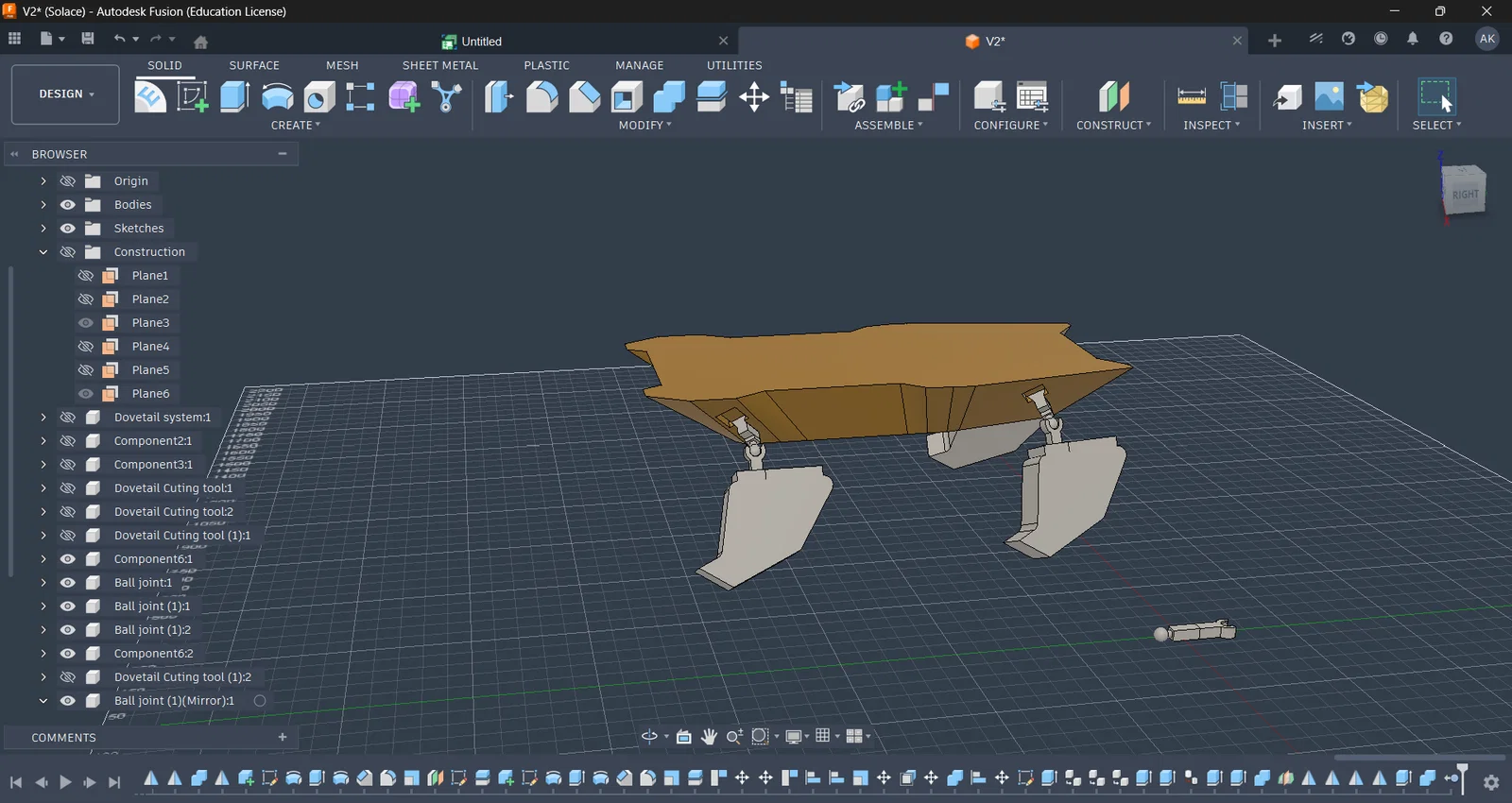
Chào các bạn đam mê in 3D, hôm nay mình xin chia sẻ một dự án đầy tiềm năng đang trong quá trình thực hiện: Mô hình robot vận chuyển phong cách khoa học viễn tưởng (Sci-Fi Cargo Robot). Đây là một thiết kế mô hình lắp ghép có khớp nối (articulated) với cấu trúc phần thân chính và hệ thống chân di chuyển linh hoạt. Mặc dù dự án vẫn đang trong giai đoạn hoàn thiện chưa xong hẳn, nhưng cấu trúc cơ bản đã cho thấy sự thú vị khi kết hợp giữa các khớp cầu (ball joint) và các điểm nối đuôi bồ câu (dovetail system) đầy kỹ thuật.
Với thiết kế hiện tại, mô hình này hướng đến việc tạo ra một chú robot có khả năng đứng vững và tạo dáng nhờ các khớp nối được tính toán cẩn thận. Phần thân máy phẳng và rộng, gợi cảm giác như một cỗ máy vận chuyển hàng hóa hiện đại. Nếu bạn là người yêu thích khám phá các mô hình chuyển động hoặc muốn tự tay hoàn thiện một dự án thiết kế cơ khí từ Fusion 360, đây sẽ là một cơ sở rất tốt để bạn tiếp tục phát triển thêm các chi tiết theo ý thích cá nhân.
Các tính năng và lưu ý khi thực hiện dự án này:
- Cơ chế khớp nối linh hoạt: Mô hình sử dụng các khớp cầu (ball joint) giúp các chi tiết chân có độ linh động cao, dễ dàng điều chỉnh dáng đứng.
- Hệ thống Dovetail: Sử dụng khớp nối đuôi bồ câu giúp kết nối các bộ phận một cách chắc chắn mà không cần quá nhiều keo dán.
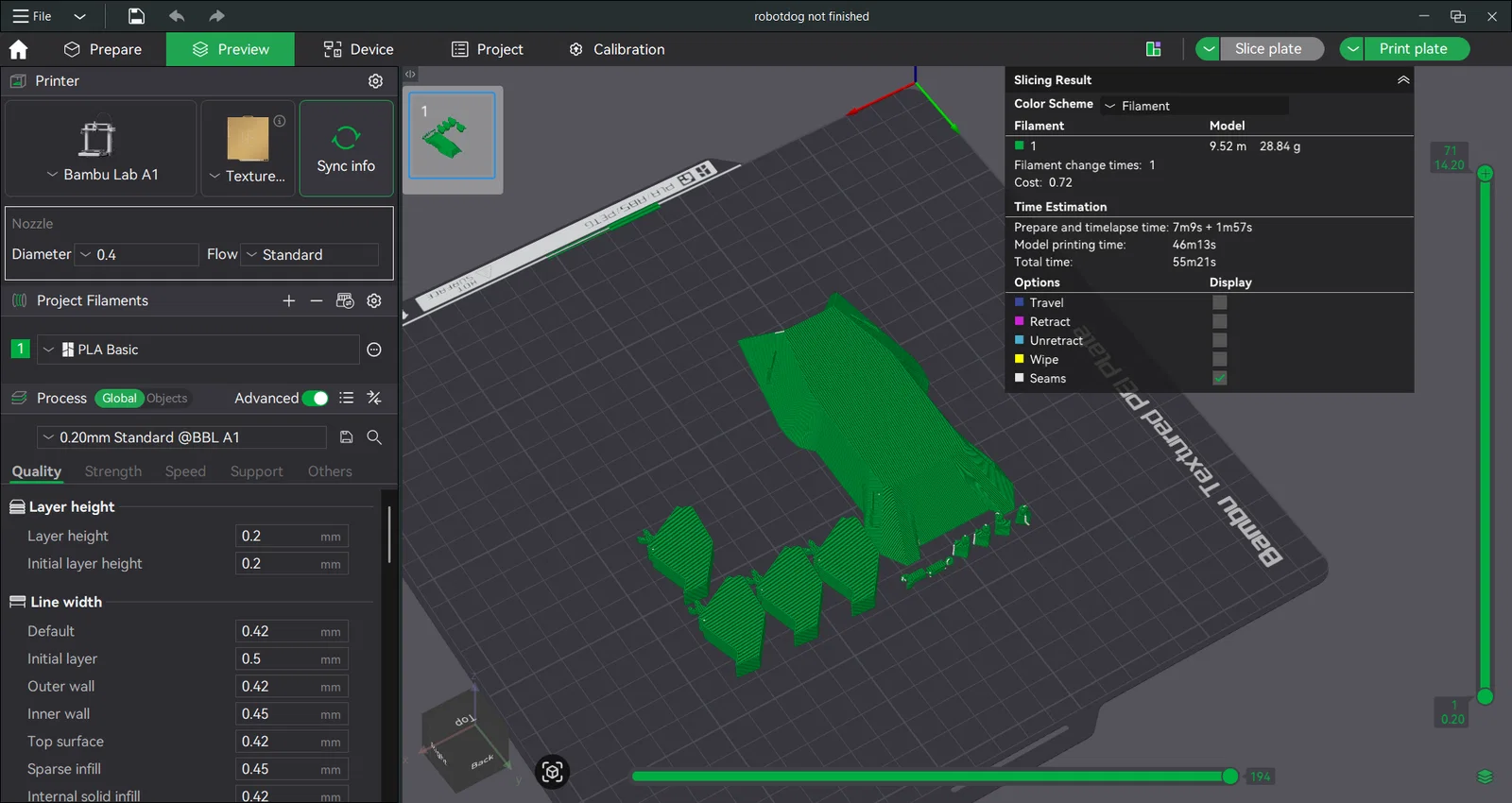
- Khả năng in 3D: Dựa trên quá trình kiểm tra bằng phần mềm slicer, mô hình này rất thân thiện với các máy in dòng Bambu Lab A1, thời gian in ước tính khoảng 55 phút cho các thành phần chính.
- Vật liệu khuyên dùng: Bạn nên sử dụng PLA Basic để đạt được độ chi tiết và bề mặt mịn màng nhất, tránh bị cong vênh khi in các chi tiết khớp nối nhỏ.
- Cài đặt in tối ưu: Nên sử dụng chiều cao lớp (layer height) 0.2mm để cân bằng giữa tốc độ và độ thẩm mỹ, kết hợp với các cấu trúc hỗ trợ (support) nếu cần thiết để đảm bảo các khớp nối không bị biến dạng.
- Lưu ý: Vì đây là dự án chưa hoàn thiện, bạn cần kiểm tra kỹ các dung sai (tolerance) tại các vị trí khớp nối để đảm bảo robot có thể lắp ráp khớp và cử động trơn tru sau khi in xong.
Đây là một dự án tuyệt vời để các bạn làm quen với việc thiết kế các mô hình có khớp nối phức tạp. Hy vọng các bạn sẽ cảm thấy hứng thú và cùng đóng góp để hoàn thiện chú robot độc đáo này nhé!
Giấy phép

File mô hình

Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!