Mô hình nền tảng Hexapod 6DOF tối giản (Stewart Platform)

Khám phá mô hình Hexapod (Stewart Platform) với thiết kế tối giản, hỗ trợ 6 bậc tự do (6DOF) cho các ứng dụng cơ học và robot học. Sản phẩm được trang bị hệ thống vít kép thông minh, giúp bạn điều chỉnh độ cao và góc nghiêng của nền tảng một cách linh hoạt, chính xác. Đây là giải pháp lý tưởng cho những người đam mê kỹ thuật muốn tìm hiểu về cơ chế chuyển động đa chiều. Với hướng dẫn chi tiết về cách in 3D từ vật liệu PLA/PETG, các lưu ý về thiết lập layer height và hỗ trợ, bạn hoàn toàn có thể tự tay tạo ra một mô hình cơ khí ấn tượng, đẹp mắt và có độ chính xác cao ngay tại nhà.



Mô tả
Mô hình nền tảng Hexapod (Stewart Platform) tối giản
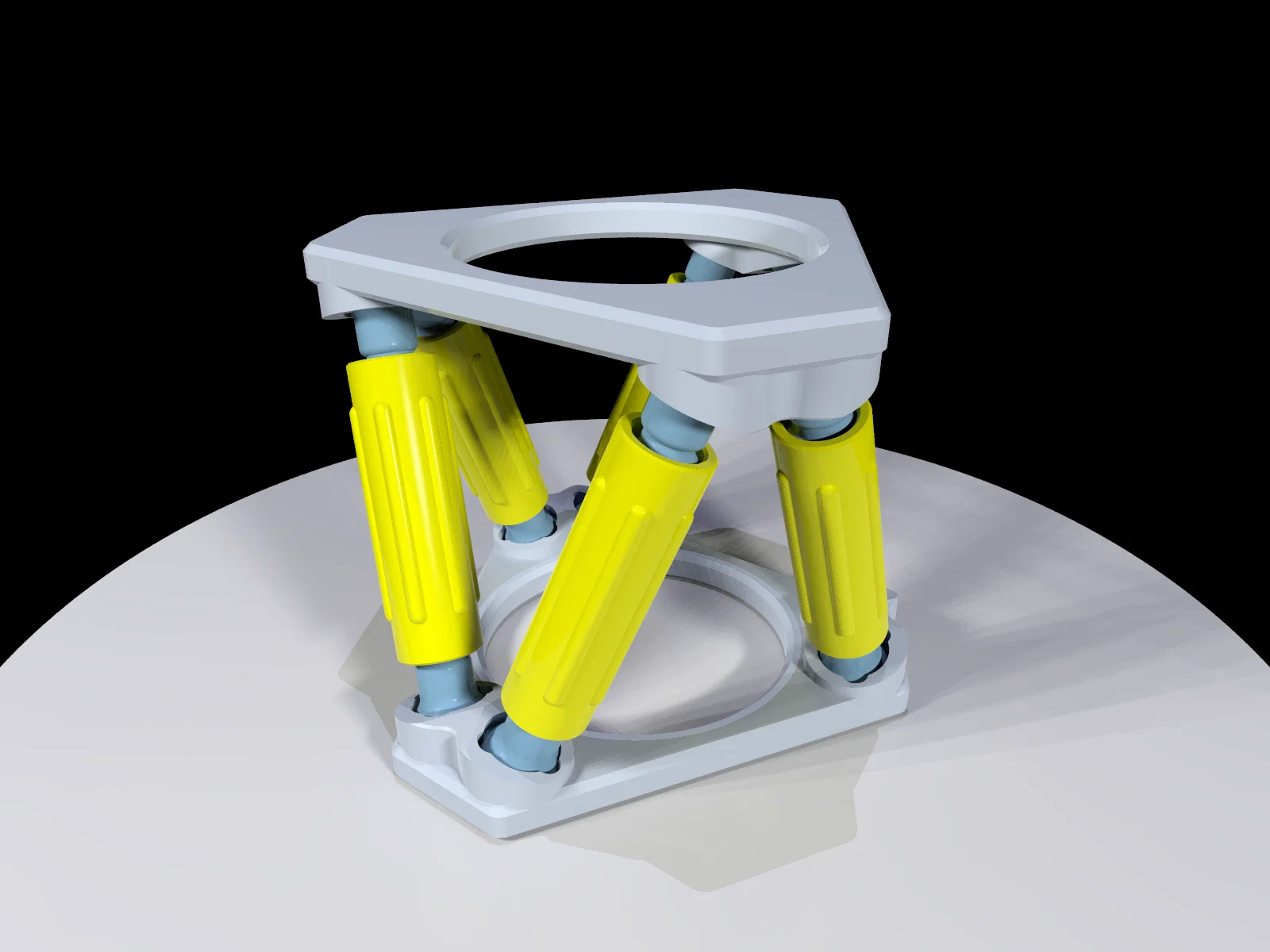
Mô hình Hexapod này là một thiết kế thông minh và tinh gọn, được xây dựng dựa trên nguyên lý của Stewart Platform với 6 bậc tự do (6DOF). Đây là một dự án tuyệt vời cho những ai yêu thích lĩnh vực cơ học, robot học hoặc muốn tìm hiểu cách thức hoạt động của các hệ thống điều khiển chuyển động phức tạp. Với cấu trúc tối giản, mô hình cho phép bạn dễ dàng lắp ráp và khám phá cách 6 trụ điều khiển phối hợp để tạo ra chuyển động đa chiều linh hoạt.
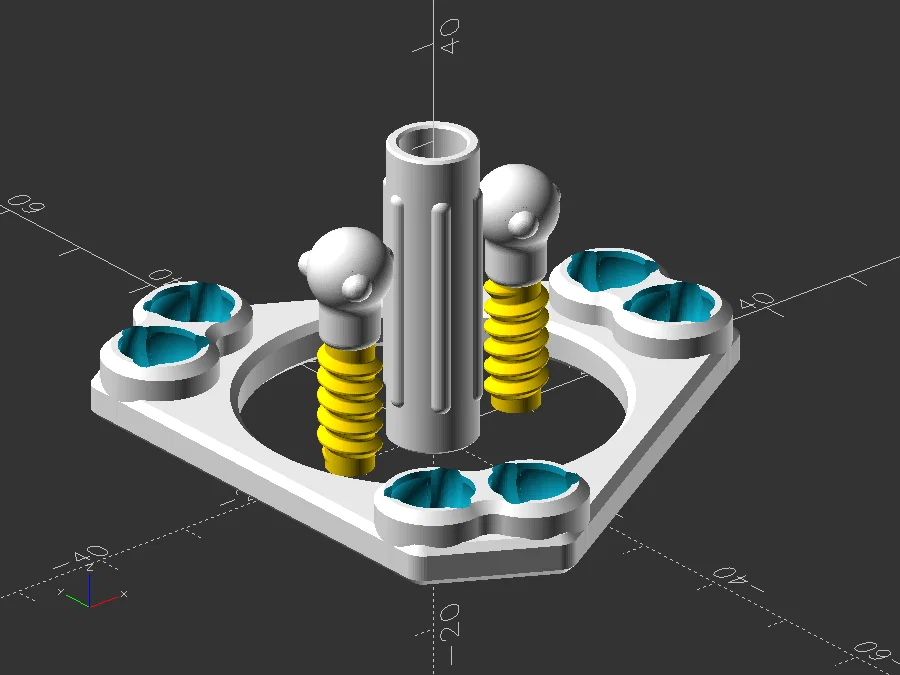
Điểm đặc biệt của thiết kế này chính là hệ thống điều chỉnh bằng vít kép, cho phép người dùng tinh chỉnh độ cao và góc nghiêng của nền tảng phía trên một cách chính xác. Việc in 3D mô hình này không chỉ giúp bạn có một vật mẫu trực quan để học tập mà còn là công cụ tuyệt vời để trình diễn các nguyên lý vật lý trong không gian. Các khớp nối được thiết kế cẩn thận để đảm bảo chuyển động mượt mà và ổn định trong quá trình vận hành.
Khi thực hiện in 3D mô hình Hexapod này, bạn nên lưu ý một số điểm sau để đạt được kết quả tốt nhất:
- Sử dụng nhựa PLA hoặc PETG để đảm bảo độ cứng cáp và chính xác cho các bộ phận khớp nối.
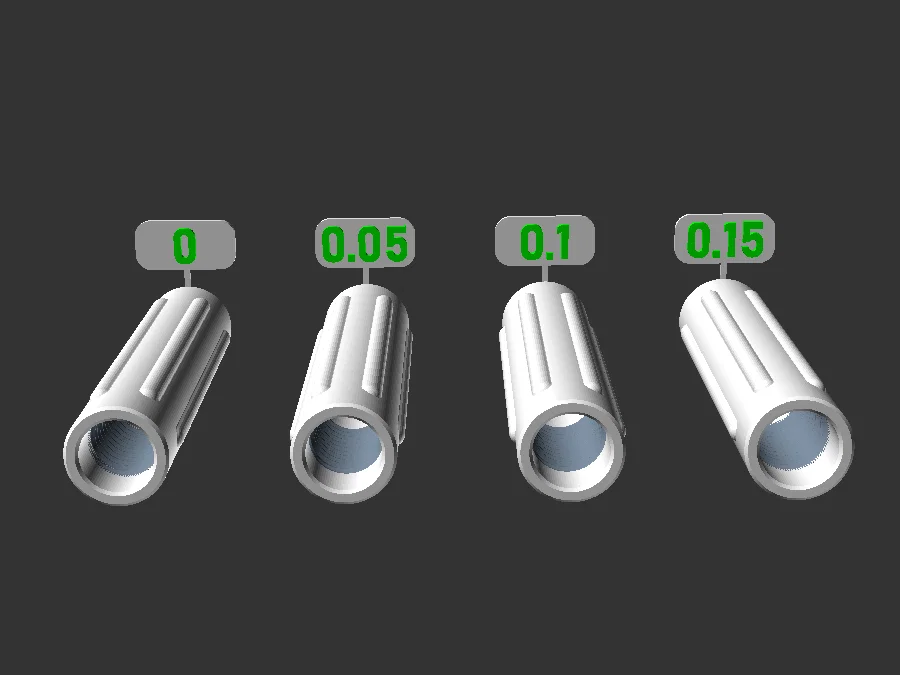
- Thiết lập layer height khoảng 0.16mm đến 0.2mm để các chi tiết vít và khớp nối đạt độ mịn cần thiết.
- Sử dụng tính năng hỗ trợ (support) ở các vị trí khớp cầu để đảm bảo không bị lỗi trong quá trình in.
- Nên in với tốc độ vừa phải để các chi tiết nhỏ như ren vít được sắc nét, tránh tình trạng bị nghẽn nhựa.
- Kiểm tra kỹ độ rơ của các khớp nối sau khi in xong, nếu cần có thể chà nhám nhẹ để chuyển động trơn tru hơn.
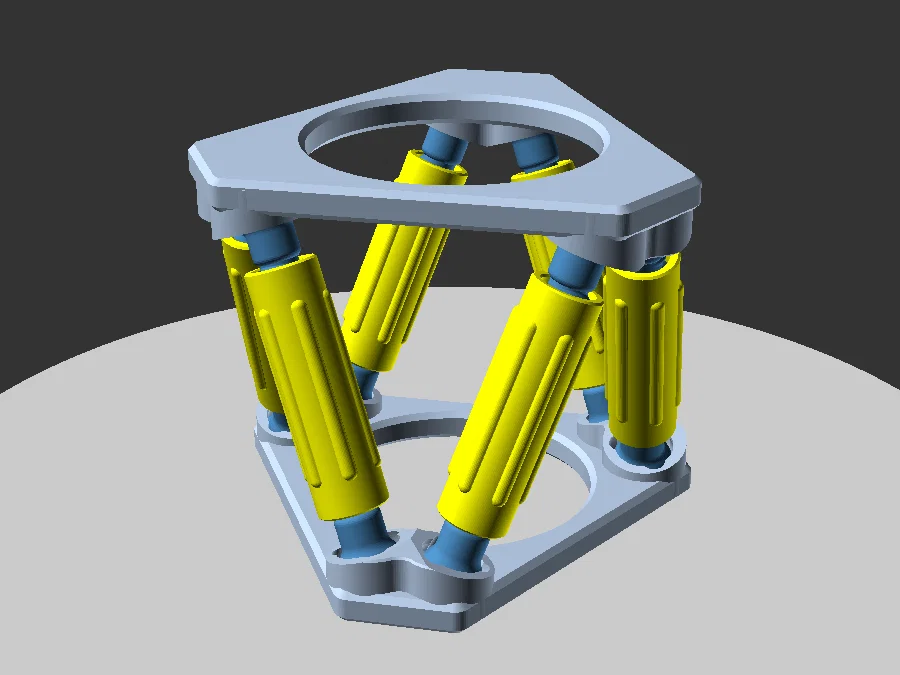
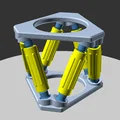
- Bạn có thể cân nhắc in các bộ phận bằng các màu nhựa khác nhau (như hình minh họa với màu vàng và xanh) để tạo điểm nhấn thẩm mỹ và dễ phân biệt các linh kiện.
Đây thực sự là một dự án thú vị dành cho các bạn sinh viên kỹ thuật hoặc những người đam mê in 3D muốn thử sức với các mô hình chuyển động cơ khí. Hy vọng bạn sẽ có những giờ phút trải nghiệm đầy thú vị khi tự tay lắp ráp hệ thống Hexapod này tại nhà.
Giấy phép

File mô hình


Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!