Otto RUN! — Đồng hồ báo thức biết bỏ chạy khi bạn bấm nút Snooze!
Biến chú robot Otto thành đồng hồ báo thức cực độc: nếu bạn bấm nút snooze, nó sẽ lăn bánh bỏ chạy khắp phòng! Bạn phải tìm và bắt được nó để tắt báo thức.



Mô tả
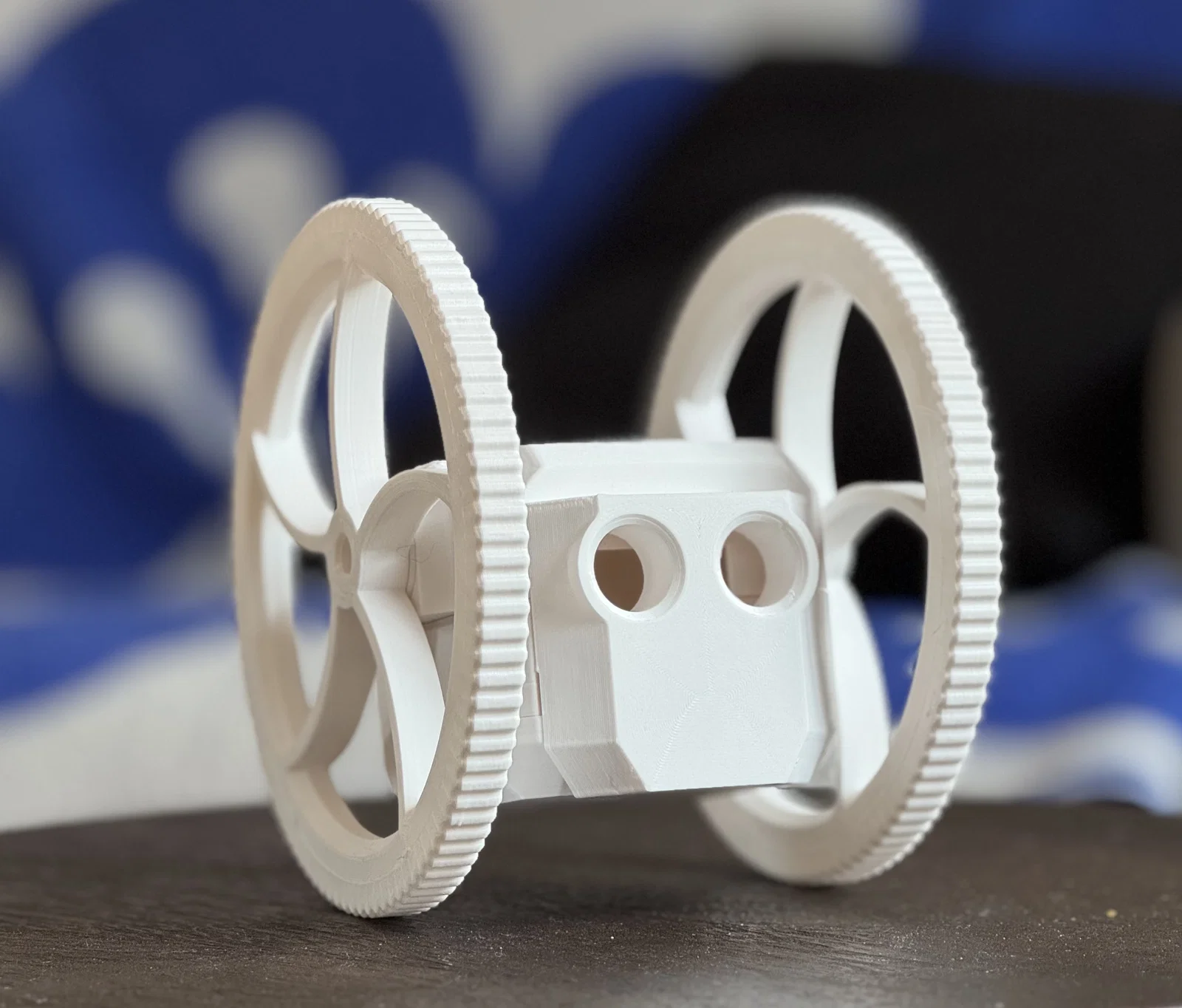
Otto RUN! — Chiếc đồng hồ báo thức biết bỏ chạy khi bạn bấm nút Snooze
⚠ Ý tưởng thiết kế. Tất cả các linh kiện đã được mô hình hóa, kiểm tra lắp ráp trong CAD và in 3D, nhưng chưa được lắp ráp hoàn chỉnh và kiểm thử với phần cứng Otto thực tế. Rất hoan nghênh mọi phản hồi về quá trình xây dựng của các bạn. ⚠
Otto RUN! là bản remix của bộ kit HP Robots Otto Starter, biến nó thành một chiếc đồng hồ báo thức đầy đủ chức năng với một quy tắc duy nhất: nếu bạn nhấn nút báo lại (snooze), Otto sẽ lăn khỏi bàn và chạy trốn. Bạn buộc phải tìm, bắt lấy và đưa tay trước cảm biến của nó trong 3 giây để tắt báo thức.
Bạn có thể cài đặt báo thức từ bất kỳ trình duyệt điện thoại hoặc laptop nào. Otto sẽ lo phần còn lại.
Cách thức hoạt động
Otto đặt trên bàn cạnh giường và hiển thị giờ hiện tại trên khuôn mặt LED. Khi báo thức reo, giữ nút trong 1.5 giây để tắt hoàn toàn mà không cần báo lại, hoặc nhấn nút một lần để báo lại — Otto sẽ phát âm thanh ngắn, sau đó lăn đi và bắt đầu di chuyển. Nó tự tránh tường, thay đổi hướng ngẫu nhiên và tiếp tục báo động khi đang chạy. Hãy tìm nó, giữ tay trước mặt nó trong 3 giây, và nó sẽ tắt với một hoạt ảnh vui nhộn.
Bạn cần những gì
Từ bộ Kit HP Robots Otto Starter:
- Motherboard (ESP32)
- 2× động cơ servo bánh xe
- Pin
- Ma trận LED 8×8
- Cảm biến khoảng cách siêu âm
- Nút nhấn
- Các loại vít trong bộ kit:
- 4× M2×7 — cho nắp pin
- 4× M2×7 — cho tấm servo vào phần thân trên
- 2× M2×4 — cho bộ giữ servo vào tấm nền
- 4× M2×4 — cho bo mạch nút nhấn
Phần cứng bổ sung:
- 4× vòng bi trượt ván 608
Không cần hàn. Mọi thứ đều sử dụng đầu nối có sẵn trong bộ kit gốc.
Linh kiện in 3D
| Bộ phận | Vật liệu | Ghi chú |
|---|---|---|
| Thân trên | PETG | — |
| Thân dưới | PETG | — |
| Thân giữa | PETG | — |
| Đế servo và nút | PETG | Lắp vào thân trên |
| Bộ giữ servo | PETG | Bắt vít vào đế |
| Đế bánh xe ×2 | PETG | Phần cấu trúc chính |
| Trục (chốt) ×2 | PETG | Ép chặt — xem mẹo in |
| Lốp bánh xe ×2 | TPU | Vành ngoài đàn hồi |
| Nắp nút | PETG | Nắp in |
Các bộ phận Otto gốc tận dụng lại: nắp pin, mặt nạ có ma trận LED.
Thiết lập in
Tất cả các bộ phận in ở độ cao lớp 0.2mm, vòi phun 0.4mm. Không cần hỗ trợ (supports) cho bất kỳ bộ phận nào.
Trục (chốt): In theo chiều ngang với 5 đường biên (perimeters) và infill dạng gyroid. Đế bánh xe: Chỉ dùng PETG. PLA có thể bị nứt khi va chạm trên sàn cứng. Lốp bánh xe: TPU với 95% infill. Sử dụng độ cao lớp 0.3mm — TPU chảy đều hơn ở các lớp dày hơn một chút. Các phần khác: PETG, 3 đường biên, 15% infill.
Lắp ráp
1. In tất cả các bộ phận. Kiểm tra độ khít khi ép trục vào bánh răng servo và đế bánh xe trước khi in toàn bộ. Độ khít chuẩn đòi hỏi lực tay vừa đủ mà không cần công cụ.
2. Lắp vòng bi vào thân. Ép hai vòng bi 608 vào hốc trên thân. Chúng phải nằm phẳng với lực ấn mạnh của ngón cái.

3. Lắp servo và nút. Gắn nắp nút vào phần thân trên. Trên bộ giữ servo, cố định bảng nút nhấn bằng 4 vít M2×4. Gắn đế vào thân trên bằng 4 vít M2×7. Cố định bộ giữ servo bằng 2 vít M2×4.

4. Gắn trục vào bánh xe. Các bộ phận phải nằm phẳng. Cấu trúc trục giúp chống xoay — nó phải cảm thấy chắc chắn, không bị lỏng lẻo. Gắn lốp TPU vào vành bánh xe.
5. Kết nối bánh xe với servo. Đẩy trục qua cả hai vòng bi. Trục lúc này đã kết nối với đầu ra của servo.

6. Lắp bo mạch và pin. Đặt bo mạch và pin vào thân giữa như trong thiết kế Otto gốc.
7. Kết nối điện tử. Cắm LED matrix, cảm biến siêu âm, servo, nút nhấn và pin vào bo mạch chính bằng các đầu nối có sẵn.
8. Lắp ráp thân máy. Kẹp phần thân trên và dưới lại với nhau.

11. Nạp firmware. Tải firmware MicroPython từ GitHub. Nạp vào ESP32 bằng Thonny IDE — hướng dẫn đầy đủ có trong file README.
12. Khởi động lần đầu. Otto tạo mạng WiFi tên là OttoSetup. Kết nối từ điện thoại của bạn, nhập mật khẩu WiFi nhà, xong. Truy cập otto.local trong bất kỳ trình duyệt nào để cài báo thức.


Firmware
Otto RUN! chạy trên MicroPython. Khi khởi động lần đầu, nó mở cổng thiết lập WiFi — không cần chỉnh sửa code. Thời gian báo thức, thời gian báo lại và cài đặt bật/tắt đều thông qua trang web đơn giản tại otto.local từ bất kỳ thiết bị nào trong mạng. Thời gian tự động đồng bộ qua NTP.
Báo thức chạy theo chuỗi năm trạng thái: hiển thị giờ → báo thức → báo lại → bỏ chạy → tắt. Khi di chuyển, Otto sử dụng cảm biến siêu âm để tránh chướng ngại vật và thay đổi hướng ngẫu nhiên để lộ trình mỗi sáng đều khác nhau.
Toàn bộ mã nguồn kèm hướng dẫn đã được đính kèm.
Ý tưởng mở rộng
- Chế độ đèn bình minh — thêm dải LED SK6812 RGBW bên trong vòm khuếch tán in 3D để có ánh sáng đánh thức nhẹ nhàng trước khi báo thức kêu.
- Nhiều báo thức — cấu hình cho ngày trong tuần và cuối tuần qua giao diện web.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình










Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!