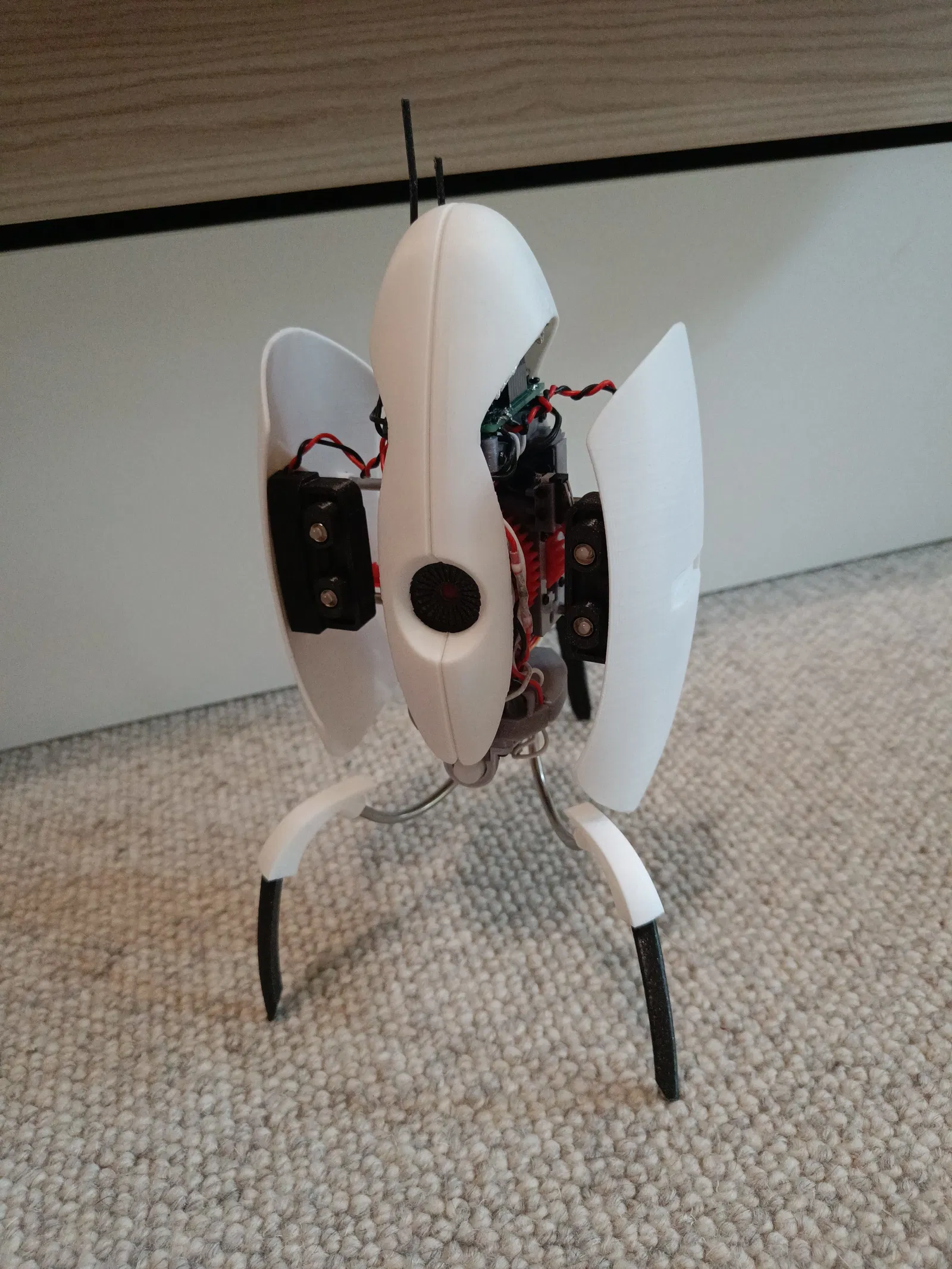
Portal Turret (Các chi tiết đã chỉnh sửa)

Đây là những bản chỉnh sửa cho dự án Portal Turret nổi tiếng của Joran, giúp in ấn dễ dàng hơn, khắc phục các vấn đề về lắp ráp và tối ưu hóa hệ thống đi dây.



Mô tả
Danh sách và mô tả các chi tiết đã chỉnh sửa:
Eyecap (Nắp mắt): Được thu nhỏ để ôm khít hơn với đèn LED đỏ 5mm, mở rộng khẩu độ để hàn vòng LED và tinh chỉnh kích thước để vừa với loại vòng LED từ Ali-express lớn hơn so với bản gốc của tác giả: _https://www.aliexpress.com/item/4001061749100.html?spm=a2g0o.order_detail.order_detail_item.3.1dacf19cksopIY_
Gun Right & Left (Súng phải & trái): Hợp nhất thành một phần duy nhất và thiết kế lại độ nghiêng để có thể in mà không cần support. Ôm sát hơn vào các đế gắn LED và bổ sung đường đi dây mới để tách biệt dây nguồn và dây tiếp đất (Gnd).
Back Leg Mount (Đế chân sau): Các lỗ được vát để gắn thanh chân chắc chắn theo kiểu nhấn vào (push fit). Có thêm khoảng hở cho các điểm hàn của bo mạch USB breakout.
Right, Left & Back Leg mounts (Đế chân phải, trái & sau): Lỗ vát giúp gắn thanh chân chặt hơn. Các điểm vát dày hơn giúp hoàn thiện bản in tốt hơn. Thiết kế lại để có thể in trên cạnh bên. Có thêm các vết lõm để hỗ trợ định hướng chân.
Back Plate (Tấm lưng): Làm dày hơn để tránh ốc vít 8mm đâm quá sâu làm kẹt bánh răng. Đầu ốc được làm âm vào trong giúp định vị dễ dàng hơn.
Rack Guide 1: Lỗ vát trên bánh răng giúp việc chèn thanh kim loại dễ dàng hơn.
Rack Guide 2: Đã loại bỏ phần góc gần công tắc để tránh va chạm với bu-lông gắn cánh M3 (trong trường hợp không sử dụng thanh ren M3 thông thường).
Các chi tiết bổ sung:
M3 Jig: Dụng cụ kiểm tra hình dạng và hướng dẫn cắt cho chân trước. Hướng dẫn cắt M3 cho thanh ren.
M4 Jig: Dụng cụ kiểm tra hình dạng và hướng dẫn cắt cho chân sau. Hướng dẫn cắt M4 cho thanh inox trơn và lục giác 4mm dùng một lần.
Lưu ý - Nên dùng các jig uốn nhỏ để tạo hình thanh kim loại vì bạn cần uốn quá độ cong một chút để thanh kim loại có độ đàn hồi trở lại. Các jig này dùng để kiểm tra hình dạng đã chuẩn chưa và hỗ trợ cắt độ dài chính xác.
Độ dài cần thiết cho các thanh kim loại:
- Thanh nối thân dưới: 2x 66mm M4 Inox
- Thanh dẫn hướng cánh: 4x 50mm M4 Inox
- Trục lục giác: 1x 25mm
- Thanh nối thân trên: 2x 20mm M3 ren
- Trục bánh răng: 2x 18mm M4 Inox
- Thanh gia cố chân: 3x 18mm M3 ren
- Trục xoay thân dưới: 1x 14mm M4 Inox
Hướng dẫn đi dây:
- Dây nguồn và dây Gnd từ USB đến cảm biến chuyển động và Vòng LED
- Cảm biến chuyển động D_out nối với PCB (PID)
- Dây Gnd của LED đỏ 5mm (chân ngắn) nối vào Gnd của Vòng LED
- Dây nguồn của LED đỏ 5mm (chân dài) nối với PCB (Red LED)
- Vòng LED (DI) nối với PCB (Ring)
- Vòng LED (5V) nối với PCB (VCC)
- Vòng LED (Gnd) nối với PCB (Gnd)
Một số mẹo xử lý khó khăn:
- Các thanh ray dẫn hướng cánh cần phải trơn tru, giảm ma sát cho servo. Mình đã mài bóng các đầu thanh inox bằng máy mài bàn và dùng mũi khoan 4mm như một công cụ cầm tay để làm sạch và làm mịn các lỗ dẫn hướng.
- Đảm bảo cánh đóng mở bình thường; không gian đi dây rất hẹp và súng sẽ không hoạt động nếu công tắc không kích hoạt. Công tắc nên đấu nối kiểu NO (Normally Open). Mình dùng 2 ốc đầu nút M3 12mm cho kẹp cánh thay vì thanh ren M3, nhưng bạn cần dùng 'Rack Guide 2' đã sửa đổi của mình để tránh đầu ốc va vào hộp công tắc.
- Kết nối với trang web Portal: Lần đầu nạp code, bạn cần kết nối vào Wifi 'Portal Turret' xuất hiện. Trên laptop làm việc ổn định hơn điện thoại.
- Về lý thuyết, bạn có thể truy cập http://turret.local/home nhưng cách này hiếm khi thành công. Hãy đổi IP adapter wifi sang 192.168.4.3 với gateway 192.168.4.1 rồi vào trang 192.168.4.1/home.
- Dùng trang web để chỉnh góc tâm nếu cần để cánh đóng mở không va chạm với nắp LED. Mình đã tăng ngưỡng nhận diện chuyển động vì mặc định rất nhạy.
- Tiếng rè từ loa là do nhiễu Wifi - việc đi dây loa cẩn thận sẽ giảm đáng kể.
- Không đủ chỗ dùng jack cắm dupont cho servo, hãy cắt bỏ và hàn trực tiếp vào board. Wemos có thể dùng riser. Servo 360 và 180 nên được tráo đổi chân kết nối hoặc thay đổi chân trên trang web.
- Các LED súng nên đấu nối tiếp: Dây dương vào chân dài, chân ngắn nối với chân dài của LED tiếp theo, chân ngắn cuối cùng nối dây âm.
- Cảm biến chuyển động có thể nối bằng jack dupont và ép chặt vào vị trí để cố định.
- Nếu dùng tấm lưng cũ với ốc 8mm, chúng sẽ đâm quá sâu và làm kẹt cánh. Hãy dùng phần đã sửa đổi của mình.
Giấy phép

File mô hình























Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!