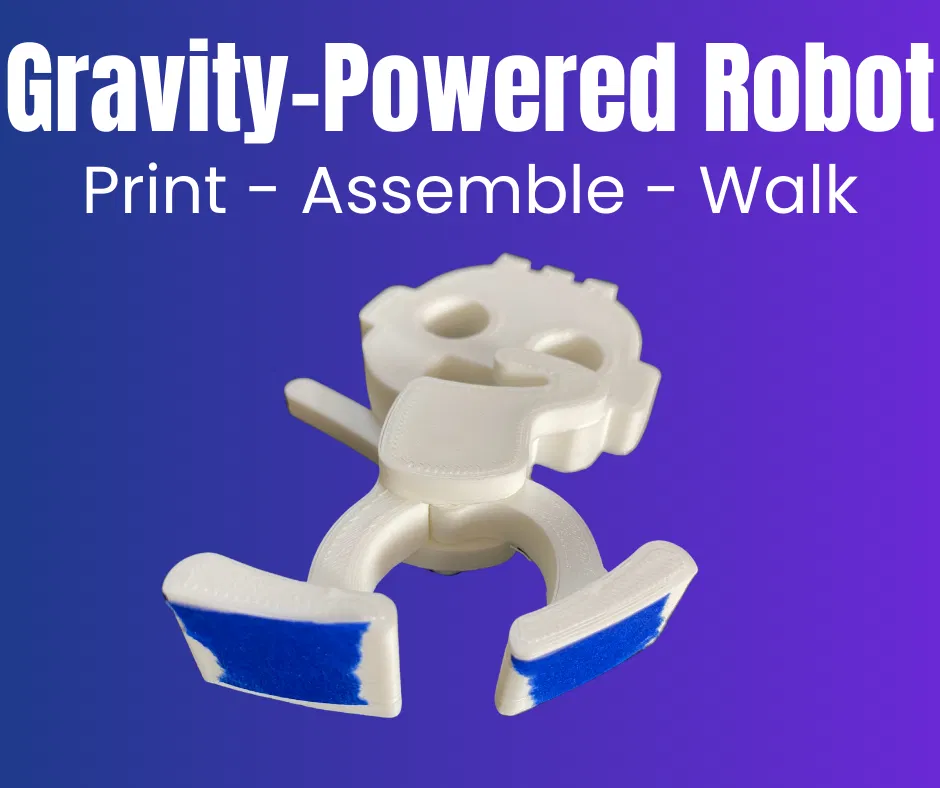
Robot Đi Bộ Ramp Walker – Không Cần Pin!

Khám phá chú robot đi bộ Ramp Walker chạy bằng trọng lực cực thú vị! Thiết kế đơn giản, không cần pin, phù hợp để in 3D làm đồ chơi giáo dục hoặc giải trí. Hãy tự tay in và xem chú robot tự bước đi trên mặt dốc ngay hôm nay!
763
Lượt Xem
24
Lượt Thích
147
Lượt Tải
Cập Nhật Apr 03, 2026



Mô tả
Con robot đi bộ Ramp Walker này là một món đồ chơi cơ học đơn giản nhưng cực kỳ thú vị, nó tận dụng trọng lực để "tự bước đi" trên các bề mặt nghiêng. Được thiết kế để in không cần support, đây là một dự án tuyệt vời cho các bé, lớp học STEM hoặc bất kỳ ai yêu thích đồ chơi chuyển động. Khi robot nghiêng người về phía trước, trọng tâm thay đổi sẽ đẩy nó bước từng bước xuống dốc.
Đặc điểm:
- Không cần motor hay pin.
- Dễ in nguyên khối hoặc in rời từng bộ phận để phối nhiều màu sắc.
- Vui nhộn và mang tính giáo dục—hoàn hảo để giải thích về chuyển động cơ học và sự cân bằng.
Thông số in:
- Chất liệu: Khuyên dùng PLA hoặc PETG
- Độ cao lớp in (Layer Height): 0.2 mm
- Độ lấp đầy (Infill): 15-20%
- Support: Có
- Brim/Raft: Tùy chọn (để bám bàn tốt hơn)
Hướng dẫn lắp ráp:
- In các bộ phận (nếu tách rời) và ráp chúng lại với nhau bằng các khớp nối đã thiết kế.
- Dùng một đoạn sợi nhựa filament làm khớp nối chân.
- Đặt robot lên đầu một cái dốc phẳng có độ nghiêng nhẹ (~10-15 độ) và xem nó tự bước đi!
- Nếu chân robot bị trượt, hãy dán một ít băng keo giấy (loại màu xanh hoặc trắng) hoặc cắt vài miếng giấy nhám dán vào dưới chân để tăng độ bám.
Mẹo nhỏ:
- Điều chỉnh độ nghiêng của mặt dốc nếu robot khó đi.
- Thêm một chút trọng lượng ở phía trước có thể giúp robot cân bằng hơn nếu cần.
- Thử nghiệm với các chất liệu in khác nhau để chuyển động mượt mà hơn.
Giấy phép

File mô hình
Đang tải files, vui lòng chờ...

Vui lòng đăng nhập để bình luận.
Vui lòng đăng nhập để khoe bản in của bạn.
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!