Arachnobeest - Robot Octopod Biết Đi Sử Dụng Cơ Cấu Jansen XRP

Arachnobeest là chú robot 8 chân chạy bằng cơ cấu Jansen, được thiết kế dễ in và lắp ráp tương thích hoàn toàn với bộ kit robot XRP. Một dự án thú vị để khám phá cơ chế di chuyển theo phong cách Strandbeest ngay tại nhà.







Mô tả
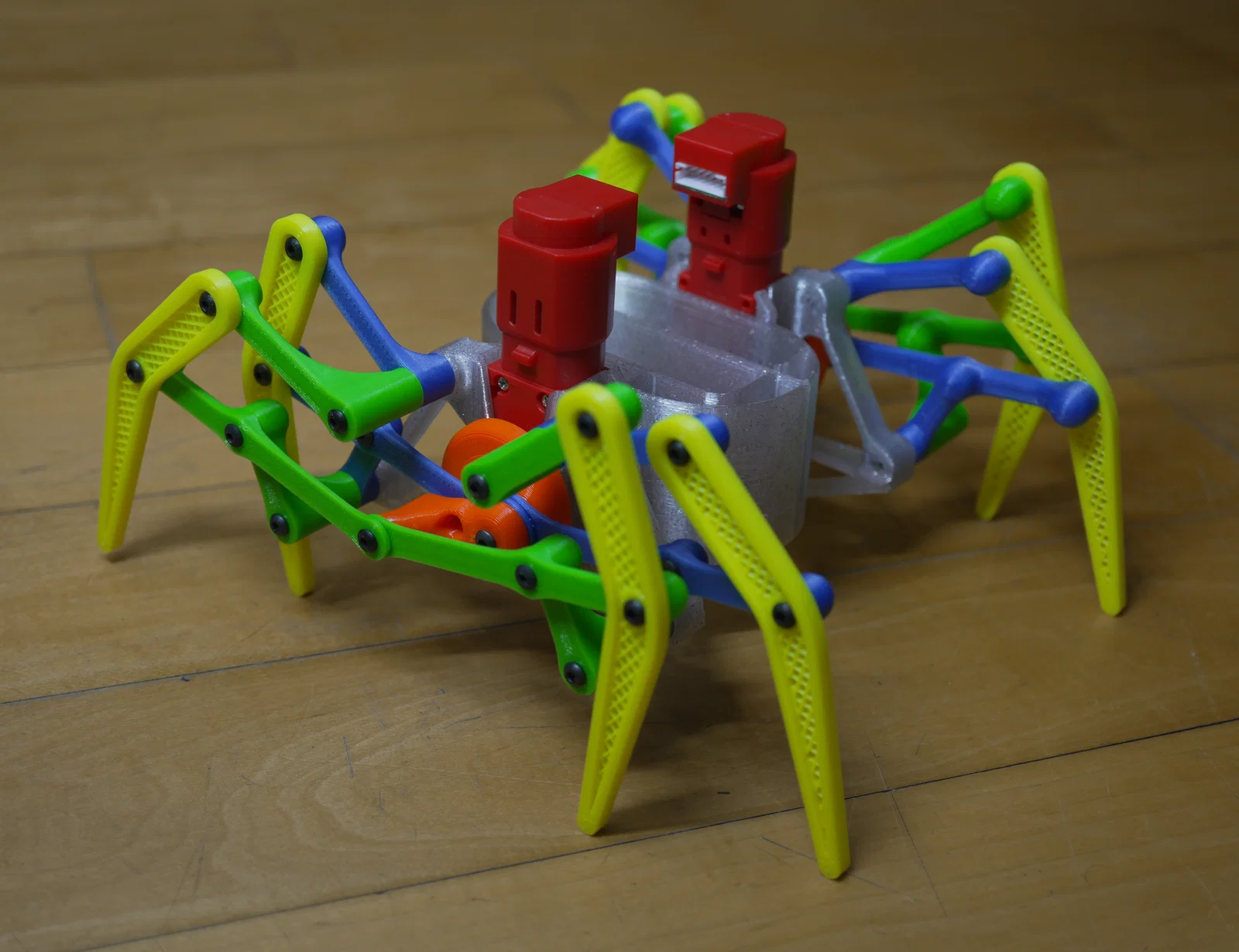
Arachnobeest
Đây là một chú robot octopod (8 chân) biết đi, có trọng lượng nhẹ, dễ in và được thiết kế dựa trên cơ cấu liên kết Jansen. Chỉ cần vài con ốc vít là bạn có thể lắp ráp hoàn chỉnh và điều khiển chú robot này bằng các linh kiện có sẵn trong bộ kit robot XRP tiêu chuẩn.
Lắp ráp
Đang cập nhật
Phần mềm điều khiển
Bạn có thể điều khiển chú robot octopod này một cách dễ dàng bằng PestoLink từ AlfredoSystems. Khi PestoLink đã kết nối với XRP, bạn chỉ cần dùng tay cầm chơi game để điều khiển robot.
Bạn có thể sử dụng file pestolink_example.py mặc định. Tuy nhiên, bạn sẽ cần điều chỉnh hướng quay để robot di chuyển chính xác. Khuyến nghị nên thay đổi dòng 20 từ:
# chưa đúng
rotation = -1 * pestolink.get_axis(0)thành:
# đã đúng
rotation = pestolink.get_axis(0)Linh kiện cần thiết
- XRP Controller Board (https://www.sparkfun.com/products/26619) HOẶC
- XRP Beta Controller Board (https://www.sparkfun.com/products/22727)
- Hobby Motor - Loại nhựa (https://www.sparkfun.com/products/24053)
- Đế pin với đầu nối thùng (Barrel Connector) (https://www.sparkfun.com/products/9835)
- Ốc vít
- 4 x 35mm M3
- 4 x 40mm M3
- 28 x 8mm M3
- Trong đó 24 con có thể dùng loại dài đến 12mm nếu bạn có sẵn các loại ốc 8, 10 và 12mm
- 2 x 6mm M2 (rất khuyến khích dùng dù không bắt buộc nếu các bộ phận in khít nhau, dùng để nối trục động cơ Hobby Motor)
Nguồn cảm hứng
Chú robot này được lấy cảm hứng từ mẫu Octopod Robot của Maker101, đã được chia sẻ trên PCBWay và xuất hiện trên HACKADAY. Mọi người hãy ghé xem thêm nội dung của họ nhé, đây là nguồn cảm hứng rất tuyệt vời!
https://hackaday.com/2025/01/16/building-a-3d-printed-strandbeest/
Giấy phép
File mô hình





















Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!