Robot lăn tự cân bằng sử dụng vòng bi và đối trọng

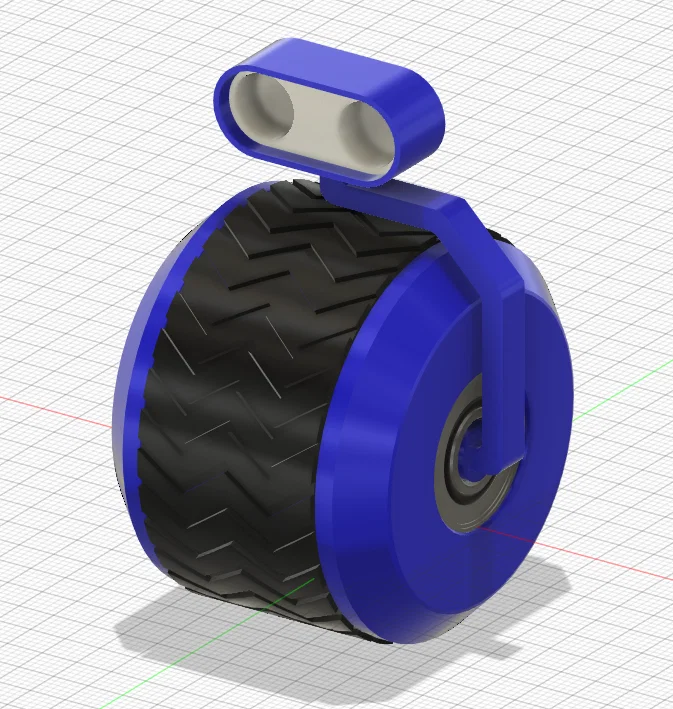
Mẫu robot lăn tự cân bằng đã được cải tiến giúp di chuyển mượt mà hơn nhờ bổ sung vòng bi và đối trọng. Thiết kế tối ưu, không cần support, dễ lắp ráp và bảo trì, đảm bảo hiệu quả in ấn tốt nhất cho người chơi 3D printing.
3.2K
Lượt Xem
121
Lượt Thích
299
Lượt Tải
Cập Nhật Apr 12, 2026


Mô tả
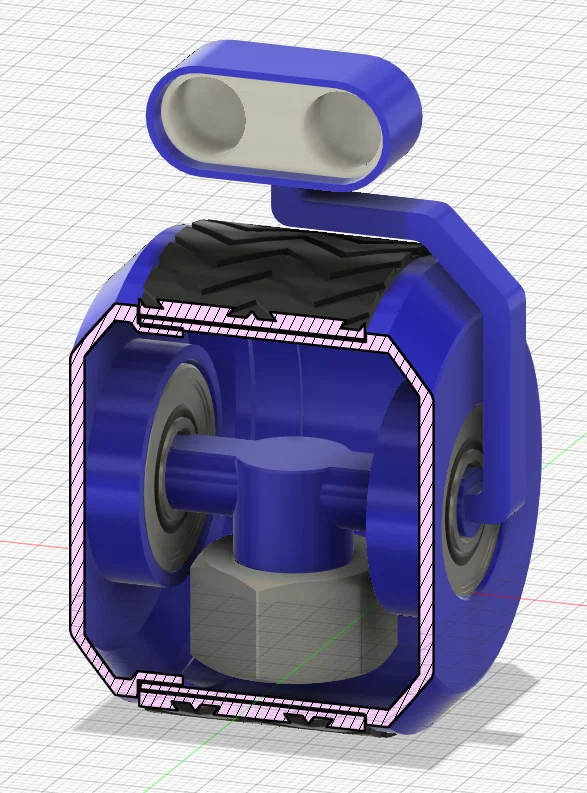
Mình cực thích thiết kế gốc của bạn @Judhini_1605028. Tuy nhiên, nó khá khó để lăn một cách mượt mà, nên mình đã cải tiến bằng cách thêm vòng bi và cục đối trọng.
Mình thường thiết kế các mẫu 3D dựa trên các tiêu chí sau:
- Không cần hỗ trợ (support) – Mình cực ghét phải gỡ support.
- In nhanh – tối ưu cho đầu phun 0.4mm với độ dày tường 2 lớp.
- Dễ dàng bảo trì – mình thích nâng cấp linh kiện nhưng không muốn tháo rời cả mô hình chỉ để thay một món.
- Có vát cạnh (chamfer) ở lớp đáy – giúp ích cho những ai có bàn in chưa được cân chỉnh hoàn hảo, tránh hiện tượng "chân voi" (elephant foot).
- Tiết kiệm nhựa – nhiều người thiết kế phần dày hơn mức cần thiết khiến mô hình cồng kềnh và tốn thời gian in.
Lưu ý
- KHÔNG CẦN SUPPORT
- Tất cả các bộ phận đều in được mà không cần hỗ trợ.
- Lốp in bằng nhựa TPU 95A – mình khuyên nên giảm tốc độ in và tăng thông số retraction.
- Cần 2 vòng bi 608-2RS 8x22x7mm.
- Cần 1 con ốc làm đối trọng.
- Có 2 phiên bản: ½ inch-13 hoặc M12-1.75.
- ½ inch-13 Amazon: https://www.amazon.com/Nuts-13-Stainless-Steel-10pcs/dp/B0BLBL8JS9
- M12-1.75 Amazon: https://www.amazon.com/Glvaner-M12-1-75mm-Thread-Stainless-Hexagon/dp/B09B6VV7WM
Hướng dẫn lắp ráp
- Tất cả các bộ phận khớp với nhau rất khít mà không cần dùng keo hay ốc vít.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình
Đang tải files, vui lòng chờ...







Vui lòng đăng nhập để bình luận.
Vui lòng đăng nhập để khoe bản in của bạn.
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!