Drone quạt ống điều hướng lực đẩy (Ducted fan thrust vectoring drone)

Tự chế tạo chiếc drone phong cách UFO Jellyfish độc đáo với công nghệ quạt ống 90mm và điều hướng lực đẩy. Dự án sử dụng PixRacer và PX4, mang lại trải nghiệm bay ổn định và cực kỳ thú vị cho những người đam mê mô hình.










Mô tả
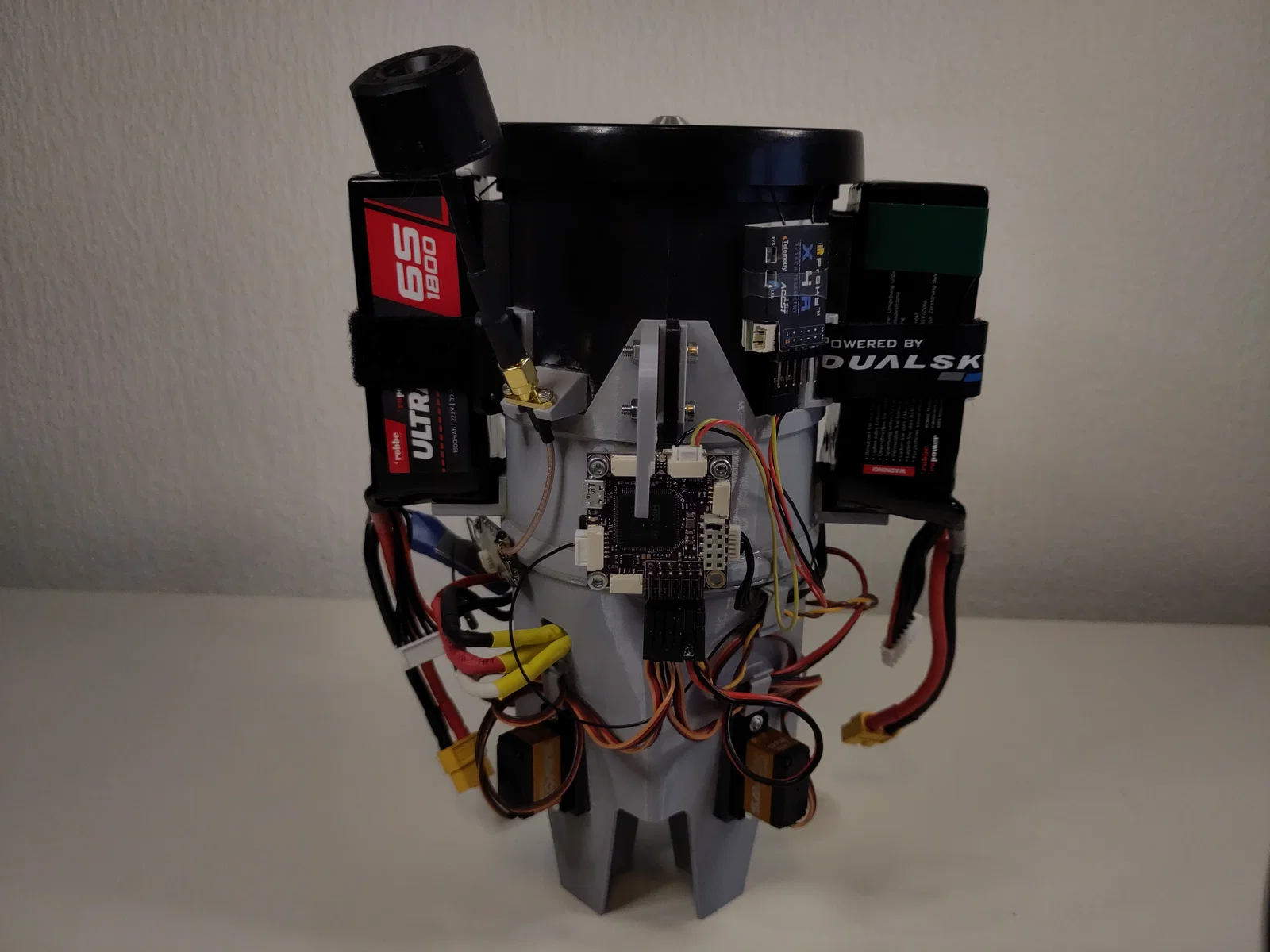
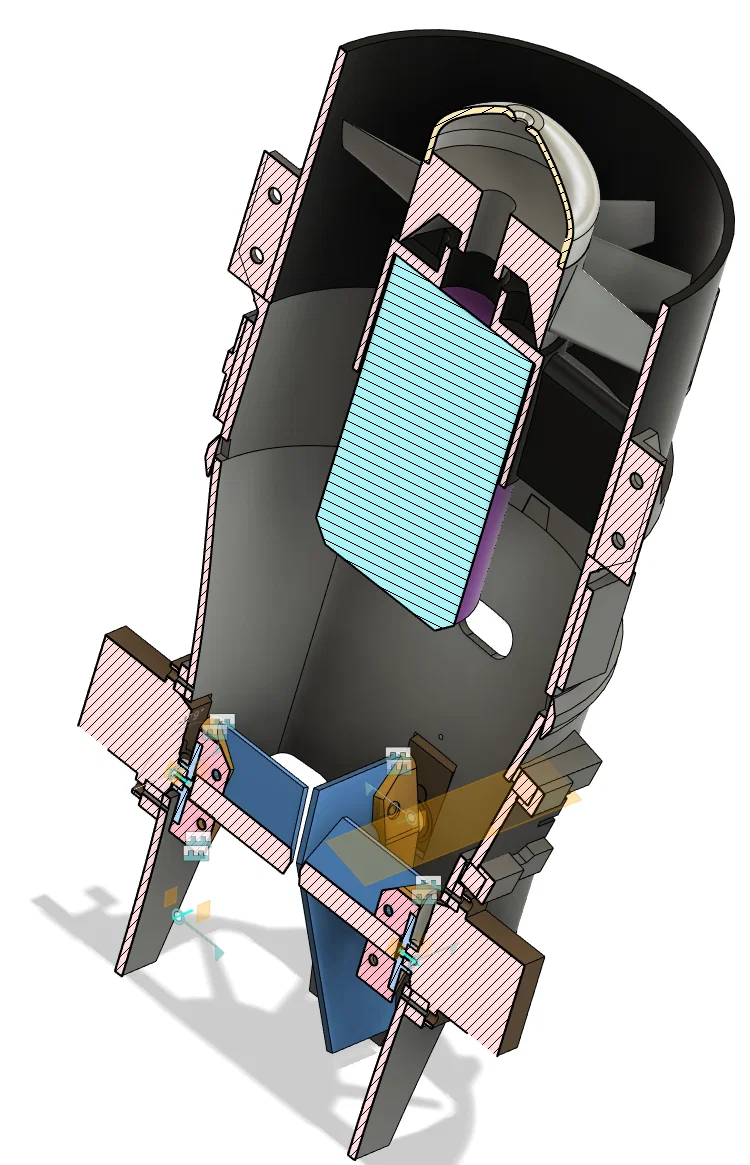
Đây là phiên bản đầu tiên của mẫu drone sử dụng quạt ống (ducted fan) 90mm, có khả năng bay lơ lửng nhờ hệ thống điều khiển hướng lực đẩy (thrust vectoring) gồm bốn cánh điều hướng (jet vanes) được điều khiển độc lập bởi các servo tốc độ cao. Độ ổn định của drone đạt được thông qua phản hồi tốc độ góc của thân máy và vòng tua máy (RPM) sử dụng phần cứng PixRacer và phần mềm PX4-Autopilot.
/!\ Cảnh báo: Đây không phải là một dự án dễ dàng và đòi hỏi các linh kiện khá đắt tiền. Bạn cần thời gian và kinh nghiệm để căn chỉnh, lắp ráp và cấu hình máy bay sao cho đảm bảo an toàn khi bay. Các thông số tinh chỉnh của bộ điều khiển bay (flight controller) chỉ hoạt động tốt nếu bạn sử dụng chính xác các linh kiện và có chất lượng lắp ráp tương đương hoặc tốt hơn tôi, nếu không bạn sẽ phải tự điều chỉnh lại.
Các linh kiện bổ sung cần thiết cho việc lắp ráp:
- 1x 90mm WeMotec Midi Fan EVO Electric Ducted Fan (EDF) với motor
- 1x Mạch phân phối điện (PDB) (ví dụ: https://www.getfpv.com/lumenier-4power-mini-pdb.html). Về cơ bản chỉ là một bảng mạch để kết nối pin với module nguồn của autopilot, ESC và BEC.
- 1x BEC, 6V, ≥3A (ví dụ: [Hobbywing UBEC 3A](<https://www.hobbywingdirect.com/products/ubec-3a-2-6s-lipo-input >))
- 1x [ESC với phản hồi RPM 80F3[X]v2](<https://powerdrives.net/80f3 >)
- 1x [Tản nhiệt 23x23mm](<https://www.fischerelektronik.de/web_fischer/en_GB/heatsinks/B02/Heatsinks%20for%20BGAs/PG/ICKBGA23x23x10/search.xhtml >) (bắt buộc cho ESC, nếu không sẽ bị quá nhiệt)
- 1x [Keo tản nhiệt](<https://www.fischerelektronik.de/web_fischer/en_GB/heatsinks/E01.02/Thermally%20conductive%20foil%20both%20sides%20adhesive/$catalogue/fischerData/PR/WLFT404_23x23_/search.xhtml >) cho tản nhiệt
- 1x Bộ thu tín hiệu RC hỗ trợ SBUS (ví dụ: X4RSB)
- [Autopilot tương thích với PX4](< https://docs.px4.io/main/en/flight_controller>). Tôi sử dụng PixRacer. Hãy đảm bảo sử dụng module nguồn hỗ trợ dòng liên tục > 60A.
- 4x Servo Savox SH-0264MG (https://www.savox-shop.com/en/savox-sh-0264mg-servo.html)
- 2x Pin LiPo Robbe UltraHP 6S 1800mAh. Bạn có thể dùng loại khác nhưng hãy chú ý kích thước (đặc biệt là chiều dài).
- 2x Đầu nối XT-60 đực
- 2x Dây đai giữ pin (20x200mm)
- 10x Ốc M2x8mm (8 cái lắp cánh điều hướng và 2 cái cho ESC)
- 8x Đai ốc M2
- 6x Ốc M3x8mm (để lắp autopilot và PDB)
- 4x Ốc M3x12mm
- 4x Đai ốc M3
- Dây tín hiệu cho ESC và phản hồi đo từ xa (telemetry)
- Dây nguồn silicon: ESC vào (4mm2 = 12AWG) và ra (2.5mm2 = 14AWG)
- 3x Đầu nối đạn cái 4mm (cho 3 pha đầu ra của ESC)
- Ống co nhiệt
- Keo Epoxy và keo CA loại đặc
- (tùy chọn) Keo khóa ren (ví dụ: Loctite xanh)
- Băng dính hai mặt (để giữ UBEC và bộ thu RC)
- Mút/đệm giảm rung cho autopilot
- Trạm hàn
- Thời gian để lắp ráp và cấu hình toàn bộ
Lắp ráp
Thân chính
- Chuẩn bị các bộ phận in 3D trước khi trộn keo epoxy:
- 1x _main_bodytop
- 1x _main_bodybottom
- 1x _body_couplingring
- 2x _batteryholder
- 4x _battery_straploop
- 4x _servomount
- 2x _pcb_holderadapter
- Trượt EDF lên trên _main_bodytop và cố định bằng ốc M3x12mm và đai ốc.
- Trộn một lượng keo epoxy nhỏ.
- Lắp ráp các phần _main_bodytop và _main_bodybottom bằng _body_couplingring và keo epoxy.
- Dán hai _batteryholder vào thân chính, ngay trên _body_couplingring. Đặt chúng thấp nhất có thể, nếu không pin sẽ không vừa khi lắp miệng hút gió.
- Dán bốn _battery_straploop vào EDF.
- Dán _servomount vào thân chính.
- Dán _pcb_holderadapter vào mỗi bên của thân chính, bên dưới giá đỡ EDF (căn giữa theo chiều dọc ở khoảng không trên _body_couplingring).
- Khi keo đã khô, luồn 3 pha của motor qua khe trên thân chính (làm bước này trước khi lắp cánh điều hướng sẽ dễ hơn). Bạn có thể thêm ống co nhiệt vào các đầu dây motor để bảo vệ khỏi bị hỏng do chi tiết in 3D.
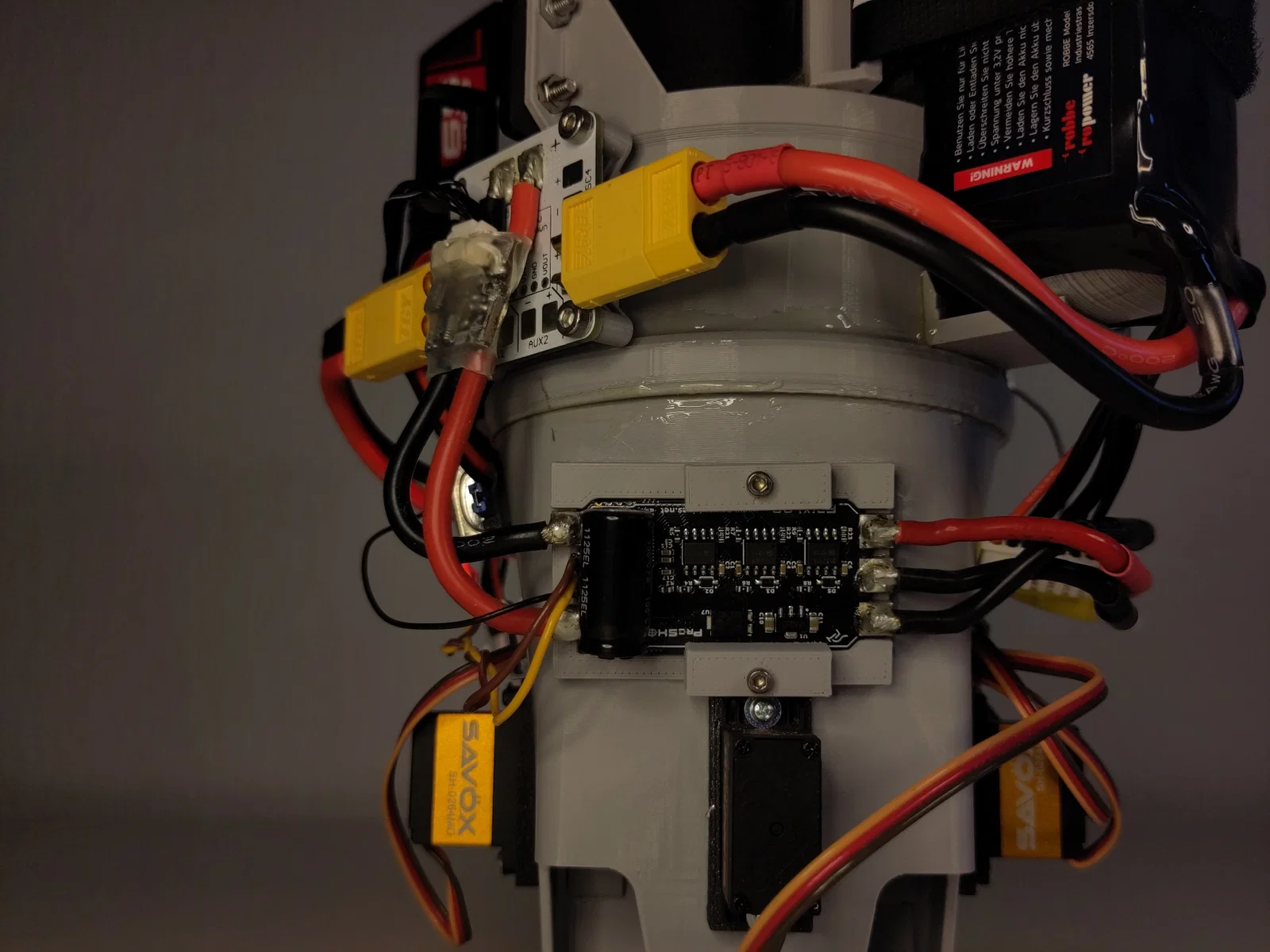
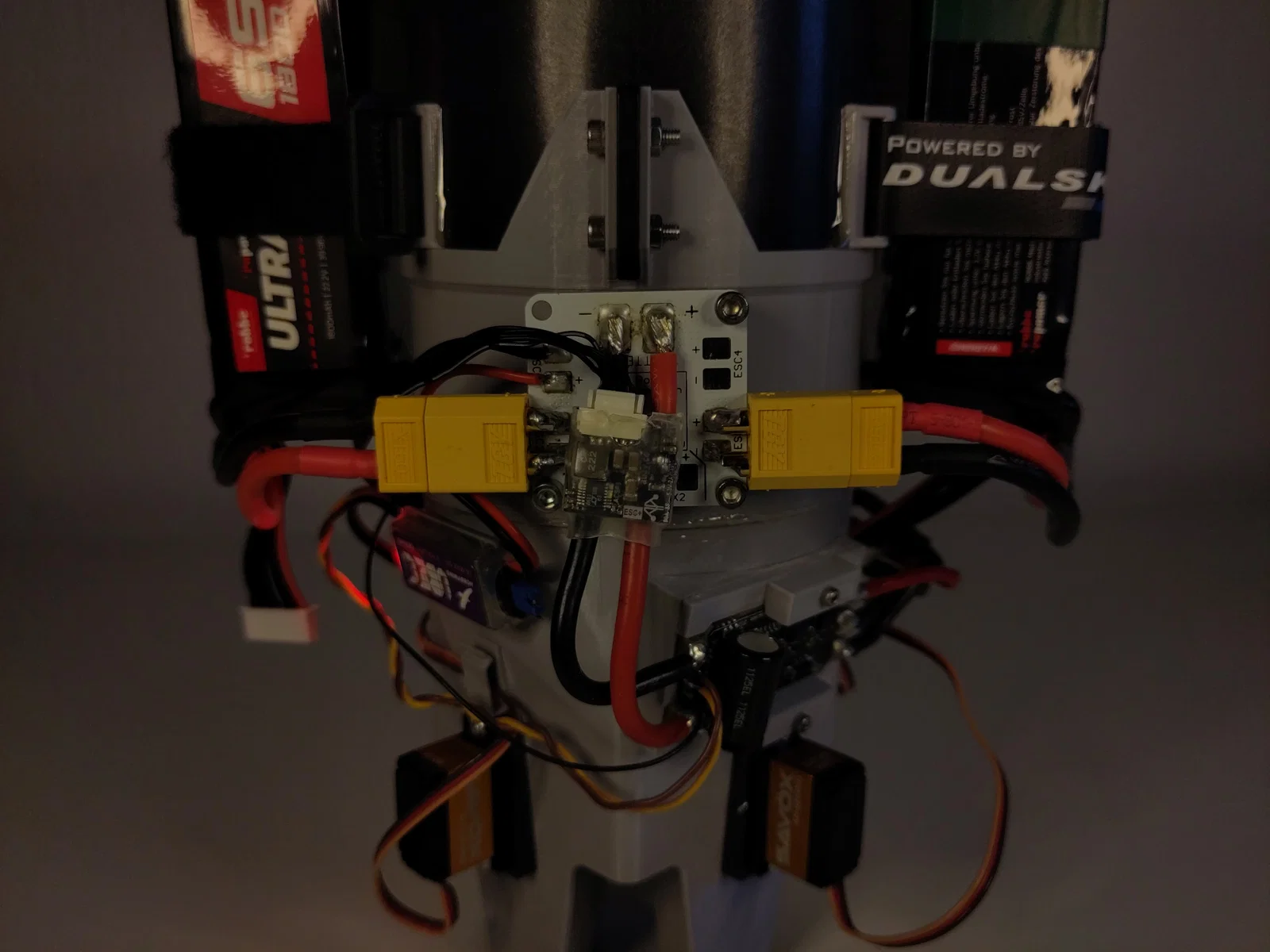
ESC và Nguồn
Từ bây giờ, bạn có thể dùng keo CA vì các linh kiện còn lại không chịu tải trọng lớn khi bay.
- Kiểm tra lỗ vuông 32x32mm trên thân máy xem tản nhiệt có vừa không. Dùng dũa điều chỉnh nếu cần.
- Dán _esc_baseadapter vào thân, căn chỉnh và giữ bằng ốc M2 trong khi keo khô.
- Dán một _pcb_holder30.5x30.5 lên _pcb_holderadapter gần _esc_baseadapter. Cái này sẽ dùng để lắp PDB.
- Tháo các ốc M2 đang giữ _esc_baseadapter và dán _esc_side_holderlong lên trên.
- Đặt bảng mạch ESC vào để lấy khoảng cách chính xác rồi dán _esc_side_holdershort vào bên còn lại (cẩn thận đừng để keo dính vào bảng mạch).
- Kiểm tra xem ESC có vừa khít và được cố định chắc chắn khi lắp cùng hai _escclamp và ốc M2x8 không.
- Đảm bảo điện áp đầu ra của BEC được đặt ở 6V.
- Hàn các đầu nối XT60 đực, module nguồn của autopilot và BEC vào PDB.
- Hàn tín hiệu đầu vào và dây mass của ESC vào dây servo (với đầu nối servo 3 chân tiêu chuẩn).
- Hàn đầu ra dữ liệu từ xa (telemetry) của ESC vào dây tín hiệu có đầu nối JST-GH 6 chân (để nối vào cổng telemetry UART-RX của autopilot).
- Hàn đầu ra nguồn của module nguồn vào đầu vào của ESC.
- Hàn dây nguồn với đầu nối đạn 4mm vào đầu ra của ESC.
- Hàn tụ điện vào ESC.
- Gắn keo tản nhiệt lên miếng tản nhiệt.
- Đặt nó vào lỗ vuông trên thân máy và đặt ESC lên trên. Tản nhiệt sẽ nằm ngay giữa 6 transistor lớn của ESC. Miếng tản nhiệt tuy nhỏ hơn một chút nhưng vẫn cung cấp khả năng làm mát tốt.
- Cố định ESC bằng _escclamps và ốc M2x8.
- Kết nối 3 pha của ESC và motor.
- Kiểm tra nhanh: Kiểm tra dây nhợ rồi cắm một viên pin vào. Nếu làm đúng, ESC sẽ bật nguồn và motor sẽ kêu bíp.
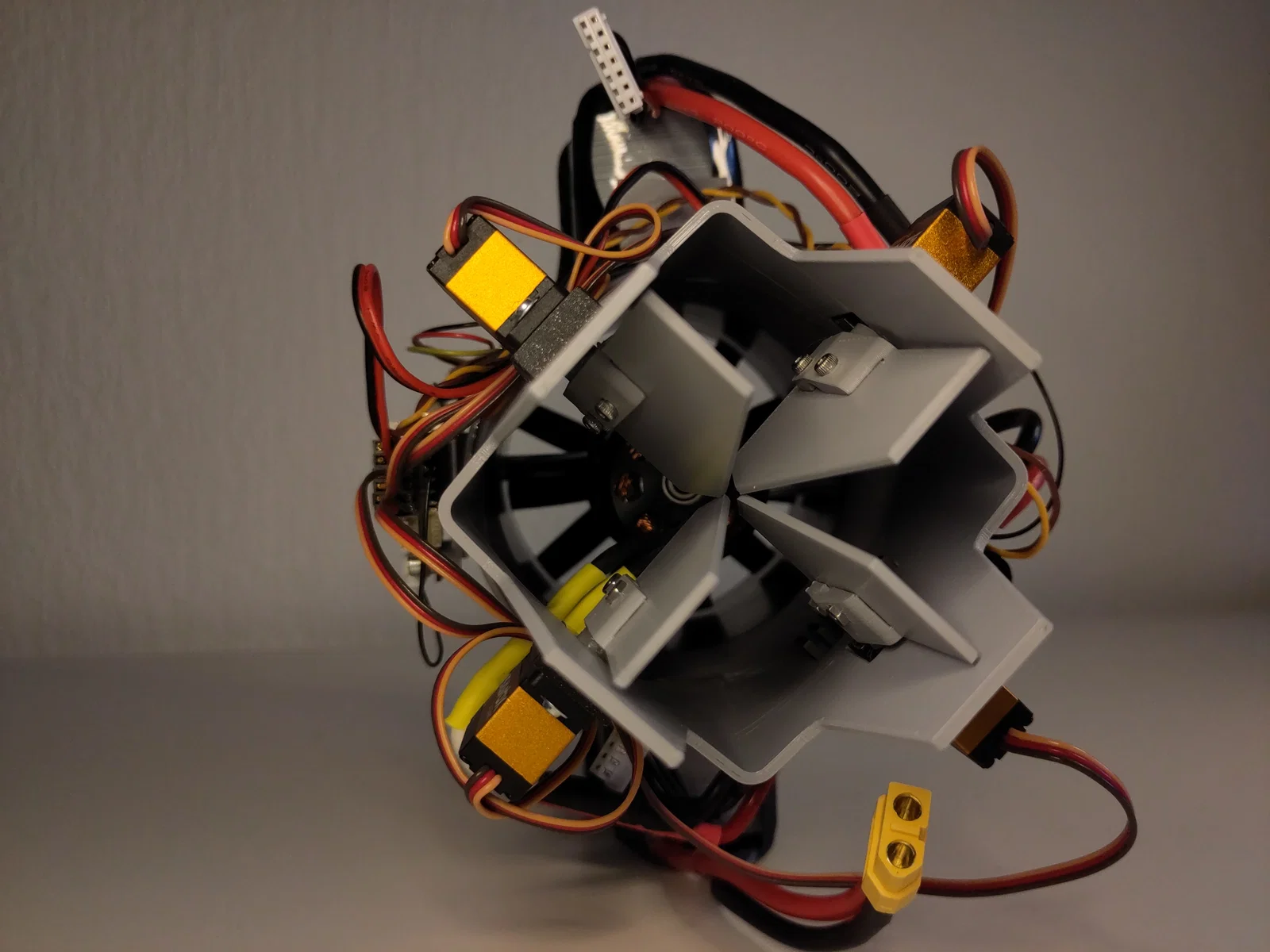
Hệ thống điều khiển hướng lực đẩy (Thrust vectoring)
- Lắp cả bốn _servo_fincoupler vào tay đòn servo bằng keo CA.
- Đưa servo về vị trí trung tâm (zero), lắp tổ hợp tay đòn + coupler theo chiều dọc và cố định bằng ốc (thêm keo khóa ren).
- Kiểm tra xem các cánh fin có thể lắp vừa vào _servo_fincoupler không (phải vừa khít nhưng lỗ phải khớp). Sau đó tháo cánh ra.
- Đặt servo vào giá đỡ, nên có đủ không gian để luồn tay đòn qua lỗ hình chữ nhật. Cố định bằng ốc đi kèm.
- Lắp các cánh fin vào _servo_fincoupler và cố định bằng ốc M2x8mm và đai ốc. Bước này hơi khó, đòi hỏi sự kiên nhẫn và đôi tay khéo léo.
Autopilot
- Gắn (bằng keo hoặc băng dính hai mặt) mút giảm rung lên _pcb_holder30.5x30.5 thứ hai và lắp nó vào _pcb_holderadapter. Bạn có thể cần thử nghiệm vài lần để có độ giảm rung ưng ý; không nên để quá mềm.
- Dán các _cableclip vào thân máy để đi dây gọn gàng.
- Kết nối autopilot với máy tính, nạp phiên bản PX4 (trong file .zip) bằng QGroundControl (QGC). Bạn cũng có thể lấy mã nguồn và tự build PX4 (đảm bảo đã có các sửa đổi cần thiết cho drone này).
- Load file .param (trong file .zip) (thông qua parameters→tools→load from file), sau đó khởi động lại.
- Thực hiện hiệu chỉnh cảm biến gia tốc và con quay hồi chuyển.
- Ngắt kết nối autopilot khỏi máy tính và bắt vít nó vào _pcb_holder30.5x30.5 bằng ốc M3x8.
- Kết nối tất cả dây servo, ESC (đầu vào) và BEC vào chân cắm của autopilot.
- Kết nối dữ liệu từ xa của ESC vào cổng Telemetry1 (RX) của autopilot.
- Lắp bộ thu RC bằng băng dính hai mặt và kết nối vào cổng SBUS của autopilot.
- Kết nối dây giữa module nguồn và autopilot.
- Kết nối autopilot với máy tính, hiệu chỉnh la bàn, module nguồn, RC và cấu hình các công tắc (chế độ bay, công tắc ngắt khẩn cấp, …).
- Kết nối pin.
- Truy cập tab actuators và kiểm tra thứ tự đầu ra (bạn có thể di chuyển thanh trượt để xem mỗi servo có hoạt động đúng không). Cẩn thận khi thử đầu ra kết nối với ESC.
- Tắt thanh trượt và điều chỉnh giá trị Disarmed để đưa các cánh về vị trí trung tâm.
- Điều chỉnh các giá trị Min và Max của mỗi đầu ra dựa trên giá trị Disarmed vừa tìm được:
- Minimum = Disarmed - 150
- Maximum = Disarmed + 150
- Bật lại thanh trượt và kiểm tra xem mọi servo đều nằm ở giữa khi thanh trượt ở giữa, và các cánh không va chạm khi di chuyển đến các giá trị min/max.



Kiểm tra trên bàn thử (Bench testing)
Điểm hay của thiết kế quạt kín này là bạn có thể -tương đối an toàn- cầm drone bằng tay để kiểm tra độ ổn định mà không sợ bị hỏng.
/!\ Cảnh báo: EDF tạo ra âm thanh cường độ cao có thể gây hại cho thính giác, hãy dùng thiết bị bảo vệ tai khi vận hành drone ở gần bạn.
Để kiểm tra bộ điều khiển và xem mọi thứ đã được kết nối đúng chưa, hãy bật nguồn drone, chuyển sang chế độ stabilized, arm (kích hoạt) nó, cầm nó bằng một trong các bộ pin ở cách mặt đất khoảng 1m và tăng ga lên khoảng 40% để cảm nhận lực đẩy. Các cánh điều hướng sẽ chuyển động và bạn sẽ cảm nhận được mô-men xoắn khá mạnh cố gắng đưa drone về vị trí cân bằng. Thử di chuyển cần roll/pitch/yaw trên tay điều khiển RC và xem phản ứng có đúng như mong đợi không.
Nếu mọi thứ hoạt động và drone có vẻ "chắc chắn", hãy tăng ga thêm một chút cho đến khi lực đẩy triệt tiêu hoàn toàn trọng lượng (khoảng 50% ga). Bây giờ thử thả nhẹ drone hoàn toàn và chụp lại nó sau một giây bay tự do; điều này đủ để biết drone có tự ổn định tốt không hay bị rung lắc. Nếu mọi thứ suôn sẻ, hãy tăng dần thời gian thả cho drone tự bay nhưng vẫn luôn sẵn sàng chụp lại. Khi đã tự tin, đã đến lúc cho chuyến bay RC thực thụ!
Et voilà, đơn giản vậy thôi.
Phụ kiện bổ sung
Dàn thử nghiệm (Test rig)
Để tinh chỉnh ban đầu cho drone, tôi đã sử dụng một dàn thử nghiệm dạng gimbal. Nếu cấu hình của bạn khác với tôi (ví dụ: servo, autopilot khác hoặc gắn thêm thứ khác), bạn có thể cần tinh chỉnh lại bộ điều khiển PID và thường an toàn hơn nếu làm việc đó trên dàn thử nghiệm, nơi không có rủi ro nào xảy ra. Tôi sẽ sớm công bố dàn thử nghiệm này trên Printables để bạn có thể sử dụng.
Bộ FPV
Bay lơ lửng bằng mắt thường (line of sight) thì hơi chán nhỉ? Tôi đang lắp một bộ FPV lên drone của mình và sẽ sớm chia sẻ các file in 3D để gắn camera và anten. Hãy đón chờ nhé!
Giấy phép

File mô hình















Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!