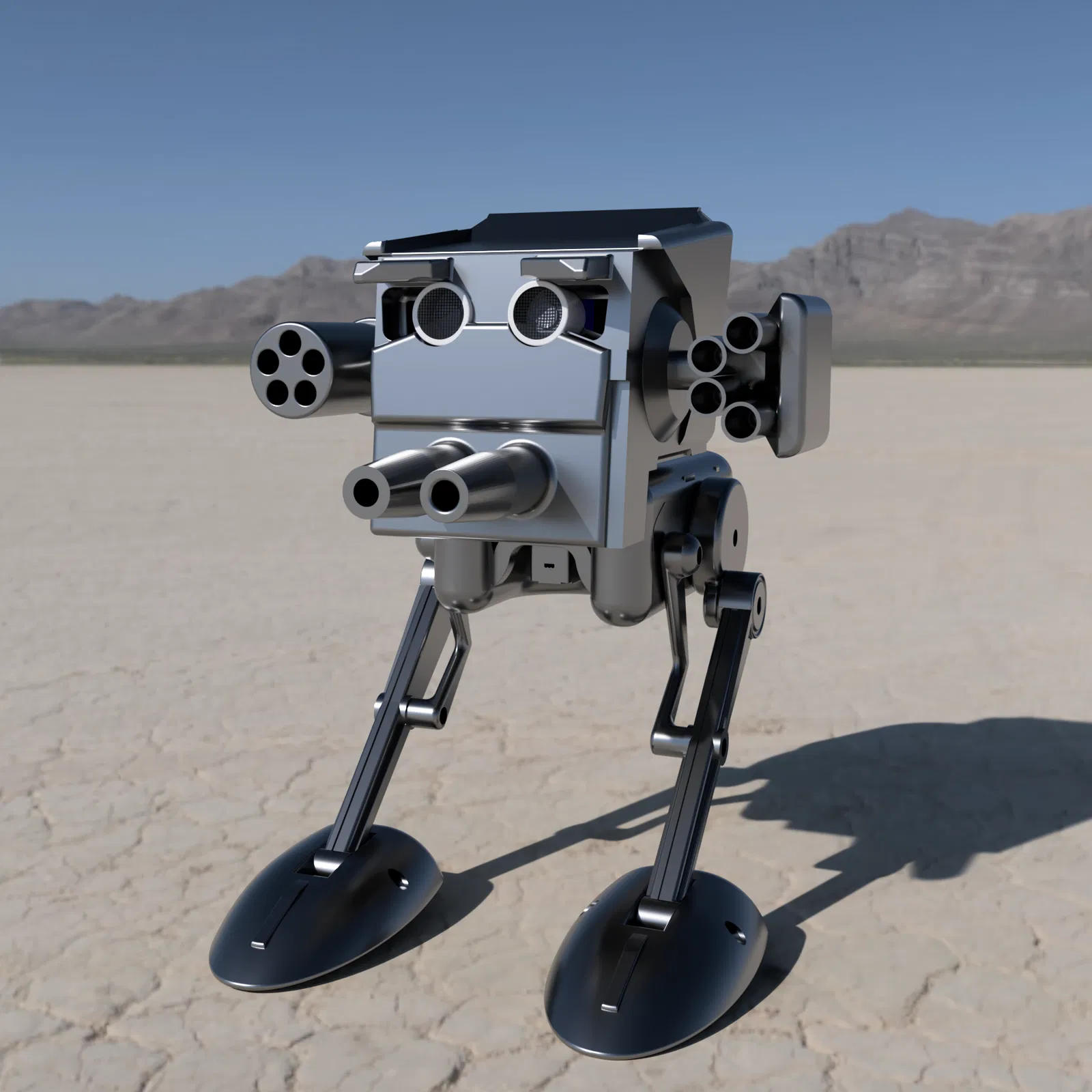
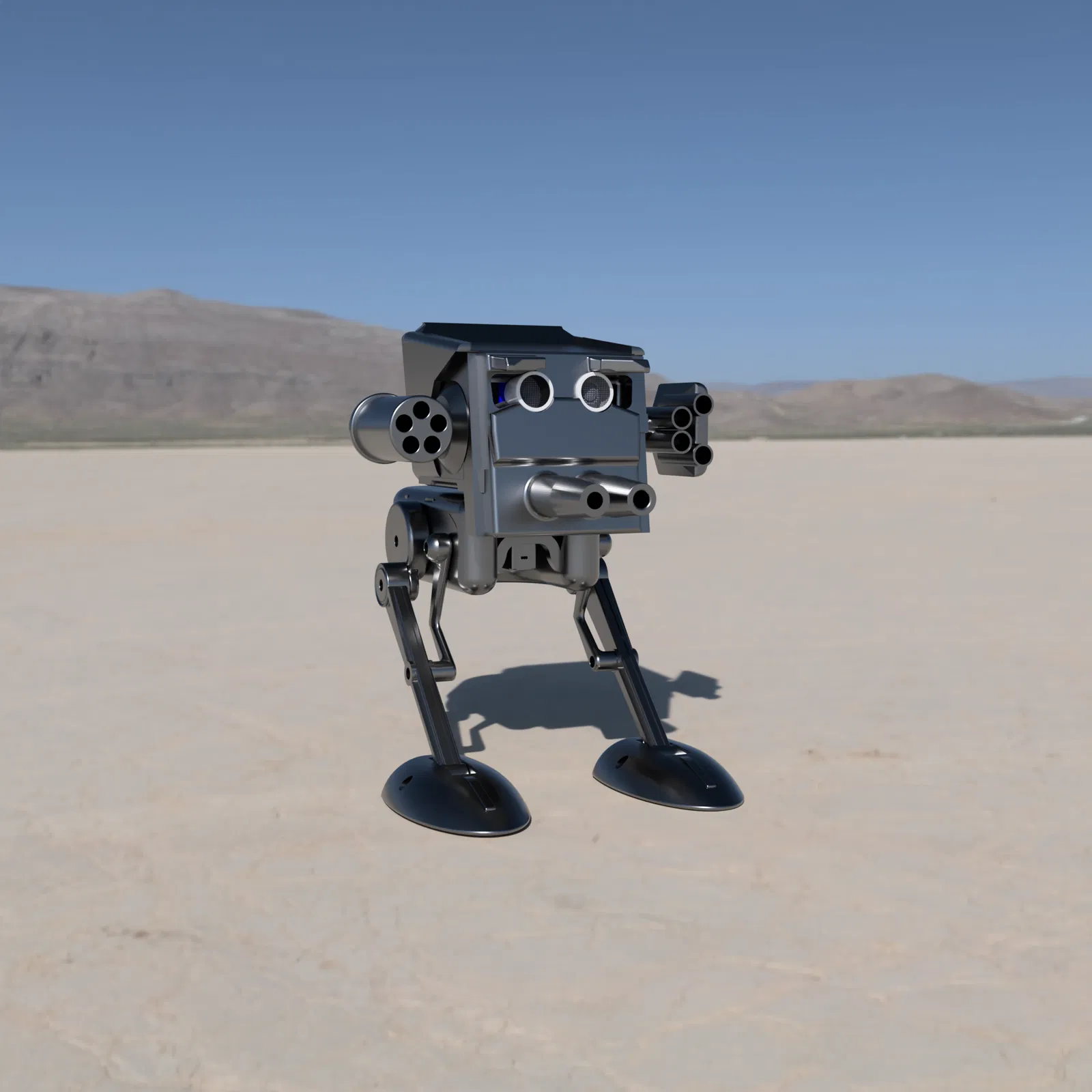
Mô hình HP Otto AT-ST có thể đi bộ

Mang đến vẻ ngoài độc đáo cho robot Otto của bạn với thiết kế AT-ST có khả năng đi bộ và xoay đầu. Sản phẩm hoàn hảo cho dự án STEM, sử dụng cơ chế Linkage đơn giản không cần hàn, dễ dàng lắp ráp với bộ HP Robots Starter Kit.


Mô tả
Giới thiệu HP Otto AT-ST
🧩 Công dụng của mô hình này
- Khoác lên chiếc HP Otto của bạn một vẻ ngoài thú vị và đầy ấn tượng
- Giúp Otto thực hiện được các chuyển động đi bộ, bước đi và quay đầu
- Rất tuyệt vời để làm thử thách STEM, dạy học về robot, hoặc đơn giản là tạo cho chú robot của bạn một cá tính mới
🔧 Cách thức hoạt động
- Sau khi in tất cả các bộ phận, hãy lắp ráp phần thân dưới và gắn hai servo để điều khiển chuyển động chân.
- Dùng 2x Motor Cross ấn chặt vào bộ phận đã in là "Cam x2" để tạo chuyển động tuyến tính.
- Khi đã lắp ráp xong, bạn có thể gắn nốt servo cho phần đầu, nhớ để dây servo thò ra ngoài.
- Gắn bo mạch và thêm mắt "Ultrasonic" (tùy chọn) để tăng tính thẩm mỹ.
- Kết nối hai servo chân và một servo đầu vào bo mạch, lưu ý vị trí cổng cắm (điều này rất quan trọng khi lập trình sau này).
- Cơ chế này chuyển đổi chuyển động quay của servo thành chuyển động bước đi tuyến tính.
- Không cần hàn—chỉ cần in, lắp ráp và cắm vào các cổng Invent.
📦 Những gì bạn cần chuẩn bị
- Bộ HP Robots Starter Kit (bao gồm linh kiện điện tử, pin, 3x servo)
Thiết lập in ấn
- Các bộ phận sau cần in với ít nhất 4 lớp tường (walls) và độ phủ (infill) 22% để đảm bảo độ cứng cáp:
- Long link x2
- Link x2
- Cam x2
- Turret pin (x10)
- Các phần còn lại in với ít nhất 4 lớp tường:
- Foot x2
- BOTTOM BODY
- Head
Lưu ý:
Đây là bản V1 nên mọi người thông cảm đợi mình in thử và kiểm tra lại độ khít nhé. Vui lòng quay lại kiểm tra để cập nhật các file in mới nhất. Mình hy vọng sẽ hoàn thiện code cho nó trước khi cuộc thi kết thúc, nhưng nếu ai hỗ trợ được thì quý hóa quá vì mình không rành lập trình lắm. Cửa cho phần đầu cần được làm lại và sẽ sớm được cập nhật.
Mình thiết kế chuyển động dựa trên cơ chế Linkage, mô phỏng theo ví dụ Hoeken đã được xoay và chỉnh sửa một chút để chân di chuyển theo một đường thẳng duy nhất.
Mọi người cứ bình luận nếu gặp vấn đề gì hoặc có ý tưởng cải tiến nhé!
Chúc các bạn vui vẻ!
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình










Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!