Otto Auto Dock – Trạm sạc & Lập trình USB-C từ tính

Trạm sạc và lập trình dành cho robot Otto, sử dụng cáp USB-C từ tính để tự động căn chỉnh, sạc pin và kết nối với máy tính một cách dễ dàng và chính xác.
46
Lượt Xem
2
Lượt Thích
1
Lượt Tải
Cập Nhật Mar 26, 2026
Mô tả
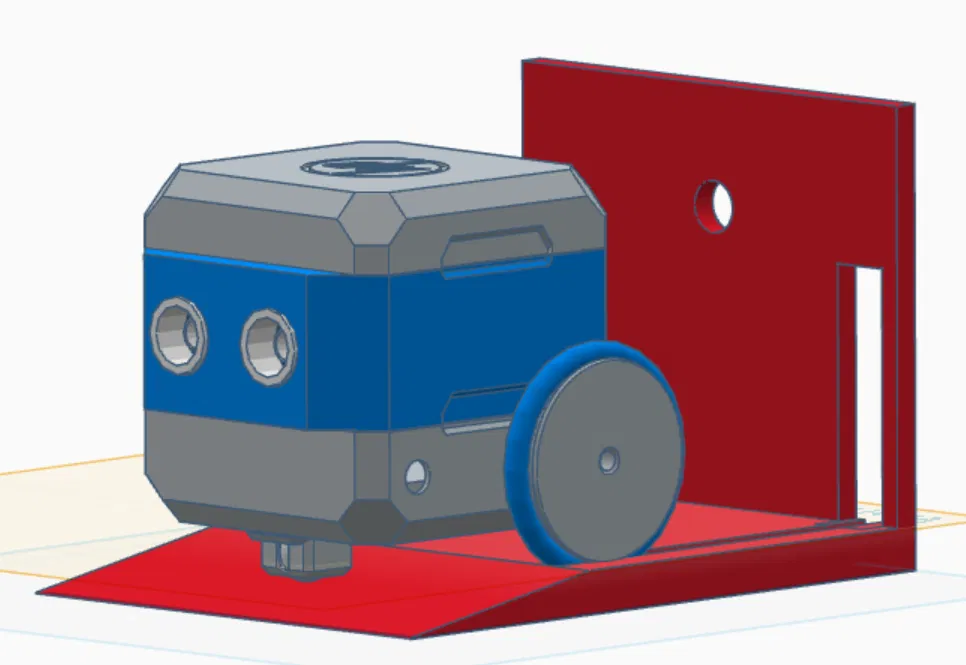
Dự án này là một trạm sạc và lập trình cho robot HP Otto, được thiết kế để sử dụng với cáp USB-C từ tính.
Trạm sạc này cho phép Otto:
- Di chuyển vào vị trí
- Tự động căn chỉnh
- Kết nối chính xác nhờ nam châm
- Bắt đầu sạc hoặc kết nối với máy tính
Tính năng
- Tự động kết nối qua USB-C từ tính
- Hệ thống đường dốc tự căn chỉnh + thanh dẫn hướng
- Hỗ trợ cả sạc pin VÀ lập trình
- Thiết kế sẵn sàng cho việc cập bến tự động trong tương lai
- Cấu trúc hoàn toàn có thể in 3D
Ý tưởng thiết kế
Hệ thống sử dụng cơ chế căn chỉnh cơ học thụ động + lực hút nam châm:
Các thành phần chính
- Đường dốc phía trước → dẫn hướng bánh xe vào vị trí
- Thành bên → căn chỉnh vị trí ngang
- Tấm chặn phía sau → xác định điểm dừng cuối cùng
- Đầu cắm USB-C từ tính → tự động hít vào robot Otto
Điều này giúp đảm bảo việc cập bến luôn ổn định ngay cả khi có sai số nhỏ về vị trí.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình
Đang tải files, vui lòng chờ...

Vui lòng đăng nhập để bình luận.
Vui lòng đăng nhập để khoe bản in của bạn.
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!