Chân Robot Mũi Nhọn Cho CARBON 13

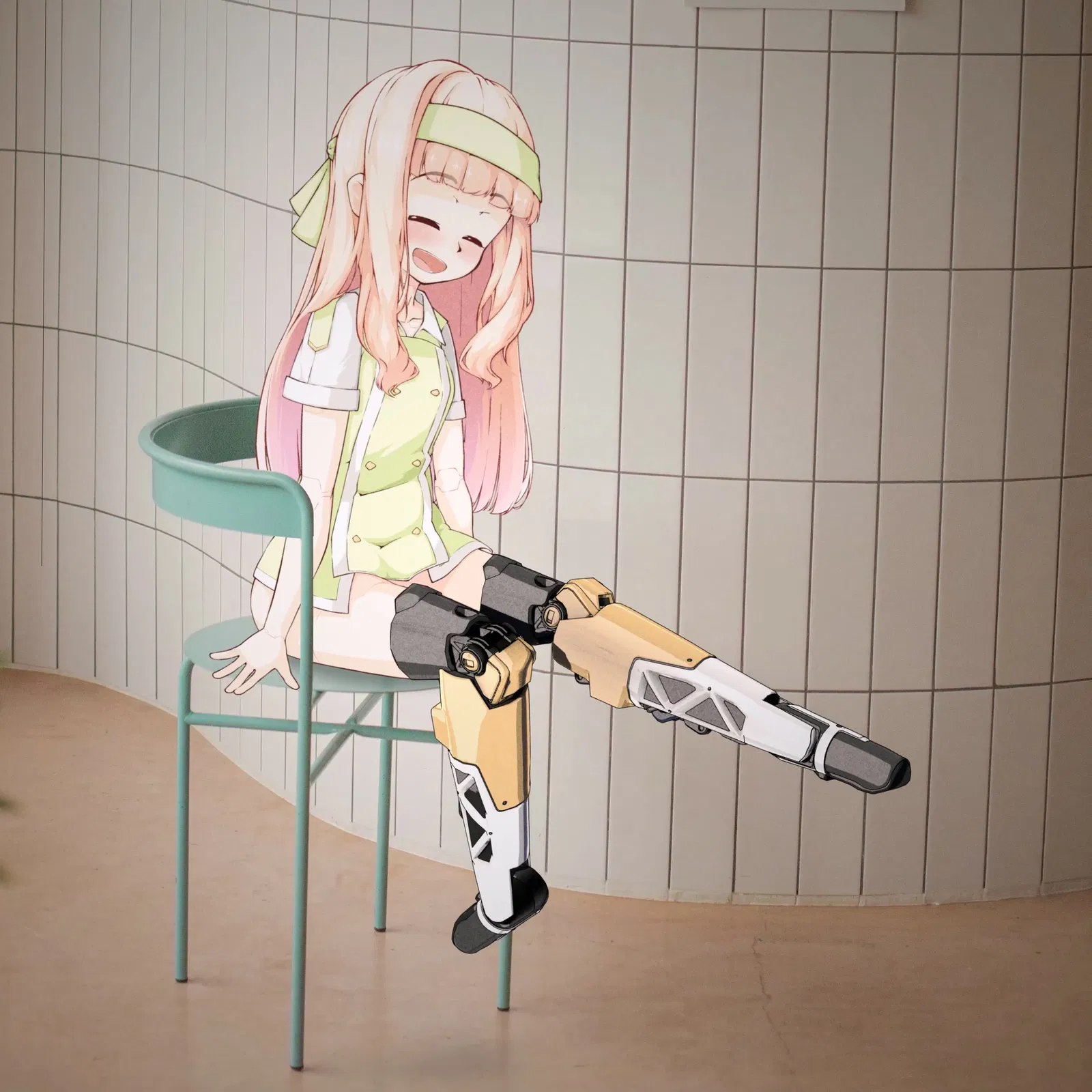
Mẫu chân robot với thiết kế cơ khí chi tiết, được chuyển đổi từ nhân vật PA-MF03 Komatsuna sang hệ thống khớp nối của CARBON 13. Sản phẩm mang tính thẩm mỹ cao, phù hợp cho các mô hình pose dáng, cần in ở tỉ lệ lớn để có độ chi tiết tốt nhất.









Mô tả
Thiết kế chân robot này được lấy từ nhân vật gốc "PA-MF03 Komatsuna" của tôi. Mẫu 3D này đã được thực hiện từ khá lâu rồi. Tôi đã cố gắng làm cho nó có thể in 3D được bằng phương pháp in bản lề (filament hinge) nhưng không thành công, các khớp quá lỏng lẻo và tôi khó mà lắp ráp được ở tỉ lệ 100% do máy in của mình không được tinh chỉnh tốt lắm.
Tôi thực sự thích thiết kế khớp nối của CARBON 13, nó in rất ổn và việc lắp ráp cũng đơn giản. Vì vậy, tôi đã điều chỉnh các thiết kế khớp này cho mẫu của riêng mình.
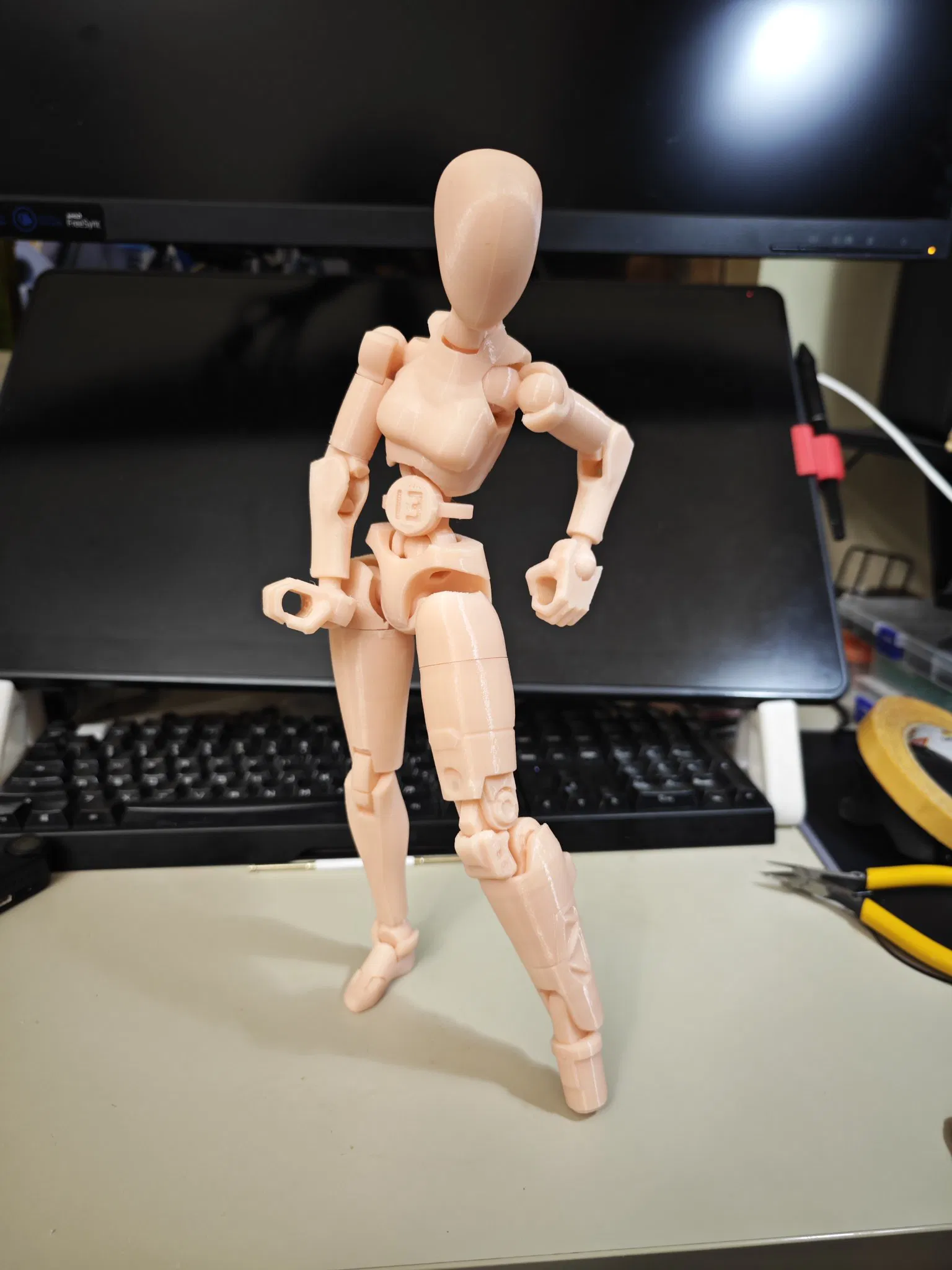
Mẫu này chủ yếu để làm cảnh (aesthetics) vì phần bàn chân nhọn khiến nó rất khó đứng vững. Nếu đây là một con robot thực sự thì chắc nó sẽ có cảm biến con quay hồi chuyển và các tinh chỉnh nhỏ để giúp giữ thăng bằng, tôi đoán vậy.
Để lắp ráp hoàn chỉnh một chiếc chân, bạn sẽ cần một vài bộ phận từ bài đăng CARBON 13 Type-F gốc của soozafone:
- "joint_f_elbow_2x-v6" cho khớp chân.
- "body_f_hip_2x_v3" cho phần hông.
Hãy Mirror (lật) phần "PA-MF03_thigh" để có được phần đùi phải.
Phần đầu gối và nắp đầu gối có thể cần dán keo lại VỚI NHAU SAU khi lắp ráp.
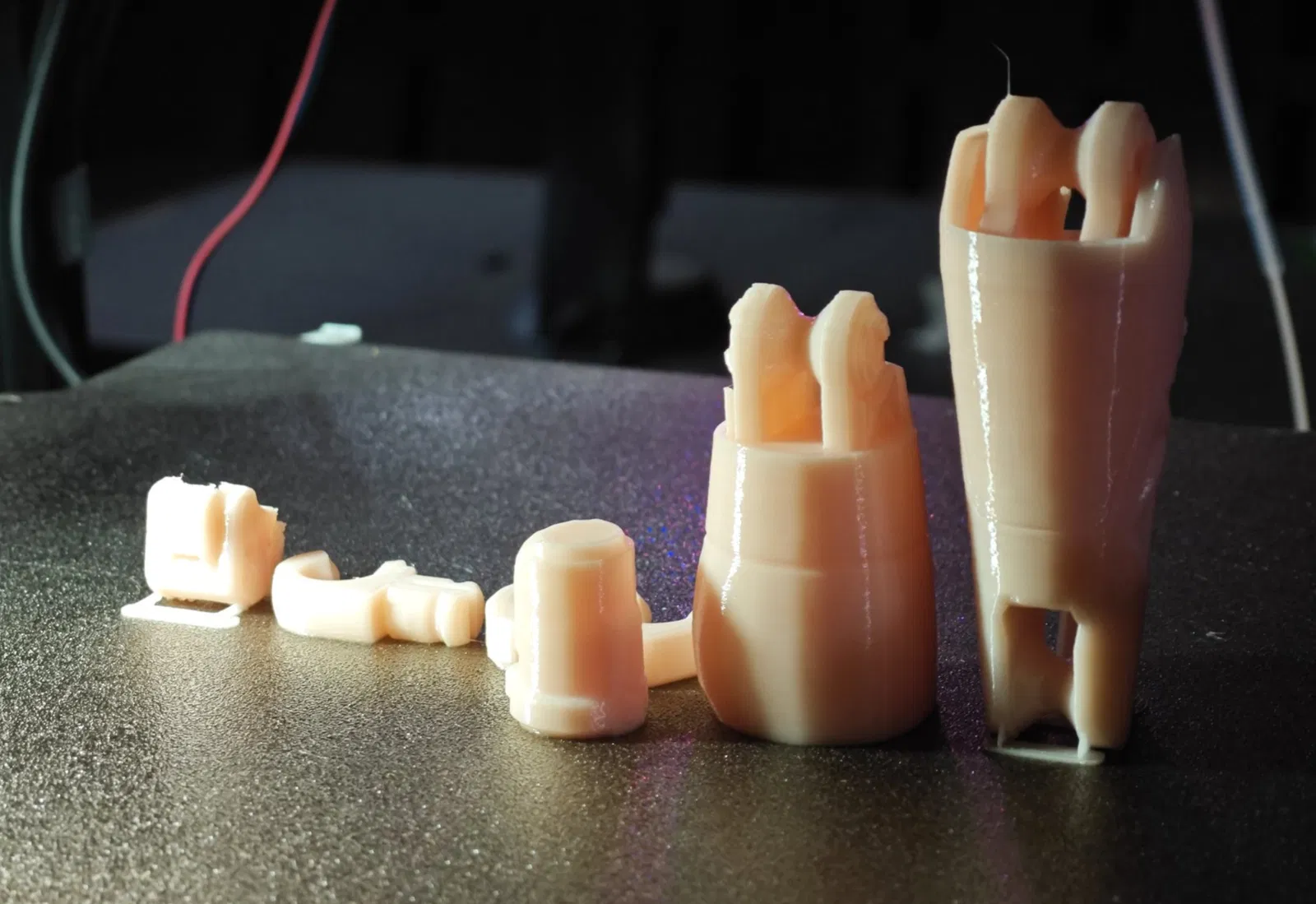
Hãy in theo hướng (orientation) như đã cung cấp với hỗ trợ (support) được tích hợp sẵn.
Tôi đã in mẫu của mình ở tỉ lệ 250%, chiều cao lớp 0.2mm, đầu phun 0.4mm, sử dụng nhựa PETG.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình







Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!