Mô hình hệ trục tọa độ XYZ cho cánh tay robot UR3e chính xác

Bạn đang cần một công cụ hỗ trợ trình diễn và giảng dạy về chuyển động robot? Hãy khám phá mô hình hệ trục tọa độ XYZ chuyên dụng cho cánh tay robot UR3e. Với thiết kế ba trục trực quan, mô hình này là giải pháp hoàn hảo để hiển thị điểm tâm xoay (TCP) trong các bài thuyết trình kỹ thuật, giúp người xem dễ dàng hình dung các góc xoay và tọa độ không gian phức tạp. Sản phẩm có cấu trúc chắc chắn, dễ dàng in 3D bằng các loại nhựa phổ biến như PLA hay PETG. Đây là lựa chọn lý tưởng cho các kỹ sư, sinh viên và những người yêu thích tự động hóa muốn tối ưu hóa quá trình làm việc và giảng dạy với robot công nghiệp. Hãy in ngay để trải nghiệm sự khác biệt trong công việc hằng ngày của bạn.


Mô tả
Mô hình hệ trục tọa độ XYZ cho cánh tay robot UR3e
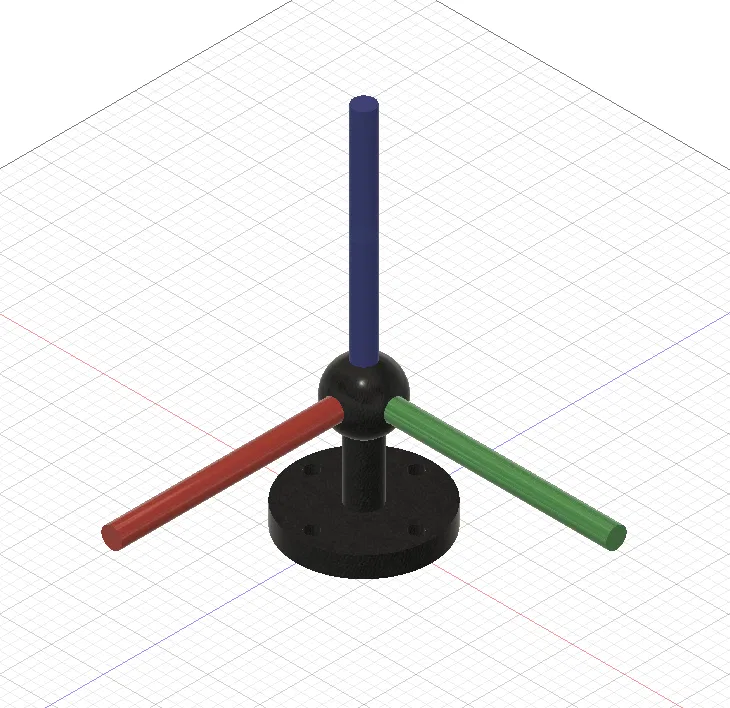
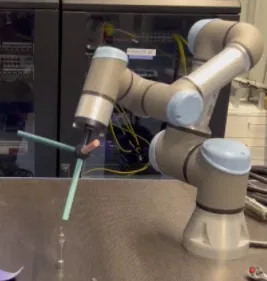
Bạn đang tìm kiếm một công cụ hỗ trợ trực quan hóa các chuyển động phức tạp cho cánh tay robot của mình? Mô hình hệ trục tọa độ XYZ này là một phụ kiện cực kỳ hữu ích, được thiết kế chuyên biệt để gắn vào đầu của dòng robot UR3e. Với cấu trúc ba trục rõ ràng, nó giúp bạn dễ dàng thực hiện các bài thuyết trình, trình diễn về điểm tâm xoay (TCP - Tool Center Point) một cách trực quan và sinh động nhất. Đây không chỉ là một phụ kiện thông thường mà là một trợ thủ đắc lực trong việc giảng dạy kỹ thuật hoặc kiểm tra độ chính xác của các thuật toán điều khiển cánh tay robot trong môi trường công nghiệp.
Sản phẩm được thiết kế với phần đế chắc chắn, dễ dàng lắp đặt vào cánh tay robot. Ba thanh trục được phân biệt rõ ràng bằng màu sắc, mô phỏng các trục tọa độ không gian 3D tiêu chuẩn, giúp người xem dễ dàng theo dõi hướng di chuyển và góc xoay của robot trong không gian. Khi robot vận hành, người quan sát có thể thấy rõ ngay lập tức hệ trục thay đổi vị trí và hướng ra sao, từ đó hiểu rõ hơn về cách thiết lập điểm TCP, vốn là một khái niệm khá trừu tượng khi mới tiếp cận với lập trình robot công nghiệp.
Để đạt được hiệu quả tốt nhất khi in 3D mô hình này, bạn cần lưu ý một số điểm kỹ thuật quan trọng để đảm bảo độ bền và tính thẩm mỹ:
- Chất liệu in: Nên sử dụng nhựa PLA hoặc PETG để đảm bảo độ cứng cáp và bề mặt mịn màng, giúp các thanh trục không bị rung lắc khi robot di chuyển tốc độ cao.
- Độ phân giải (Layer height): Nên đặt ở mức 0.2mm để cân bằng giữa thời gian in và độ chi tiết, đảm bảo phần khớp nối được cứng cáp.
- Độ phủ (Infill): Khuyên dùng infill từ 20-30% với kiểu zigzag hoặc gyroid để cấu trúc đạt độ bền tối ưu.
- Hỗ trợ (Support): Các chi tiết này chủ yếu in khá đơn giản, tuy nhiên hãy chú ý phần khớp nối trung tâm để tránh bị biến dạng trong quá trình in.
- Lắp ráp: Sau khi in xong, bạn nên làm sạch các ba-via tại vị trí lắp ghép để các trục được ăn khớp hoàn hảo nhất.
Việc sở hữu một bộ mô hình XYZ này sẽ giúp quá trình làm việc với cánh tay robot trở nên chuyên nghiệp hơn rất nhiều. Bạn sẽ không còn phải loay hoay giải thích về các tọa độ không gian nữa, vì mọi thứ đã được hiển thị trực tiếp ngay trên đầu robot một cách cực kỳ trực quan.
Giấy phép

File mô hình


Chưa có bản in nào được khoe. Hãy là người đầu tiên!
Chưa có bình luận nào. Hãy là người đầu tiên!