Robot Đồng Hành Bipedal - Các Nâng Cấp và Phản Hồi

Dự án nâng cấp và phản hồi dành cho Robot Đồng Hành Bipedal từ MakerForge.Tech. Chia sẻ về việc tích hợp chiết áp để cải thiện độ phân giải và chuyển động khớp (đang trong quá trình hoàn thiện).














Mô tả
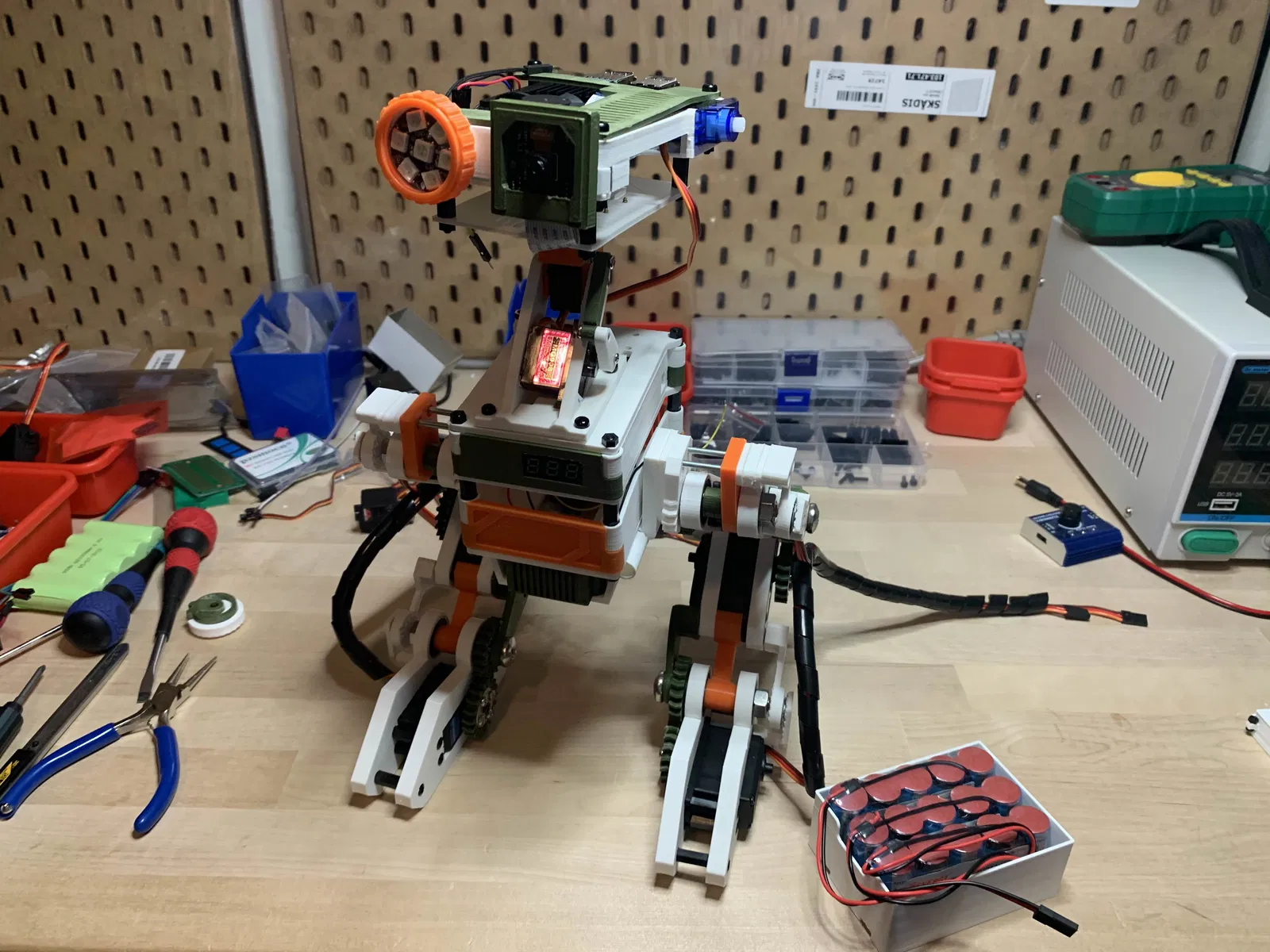
Đây là dự án vẫn đang trong quá trình hoàn thiện, mình đang bổ sung thêm tính năng phản hồi (feedback) để cho phép robot sử dụng dữ liệu vị trí khớp thay vì chỉ dựa vào servo như trước.
Mình sẽ sử dụng trang này để cập nhật quá trình làm việc trên con robot của Makerforge.tech, phiên bản buddy.
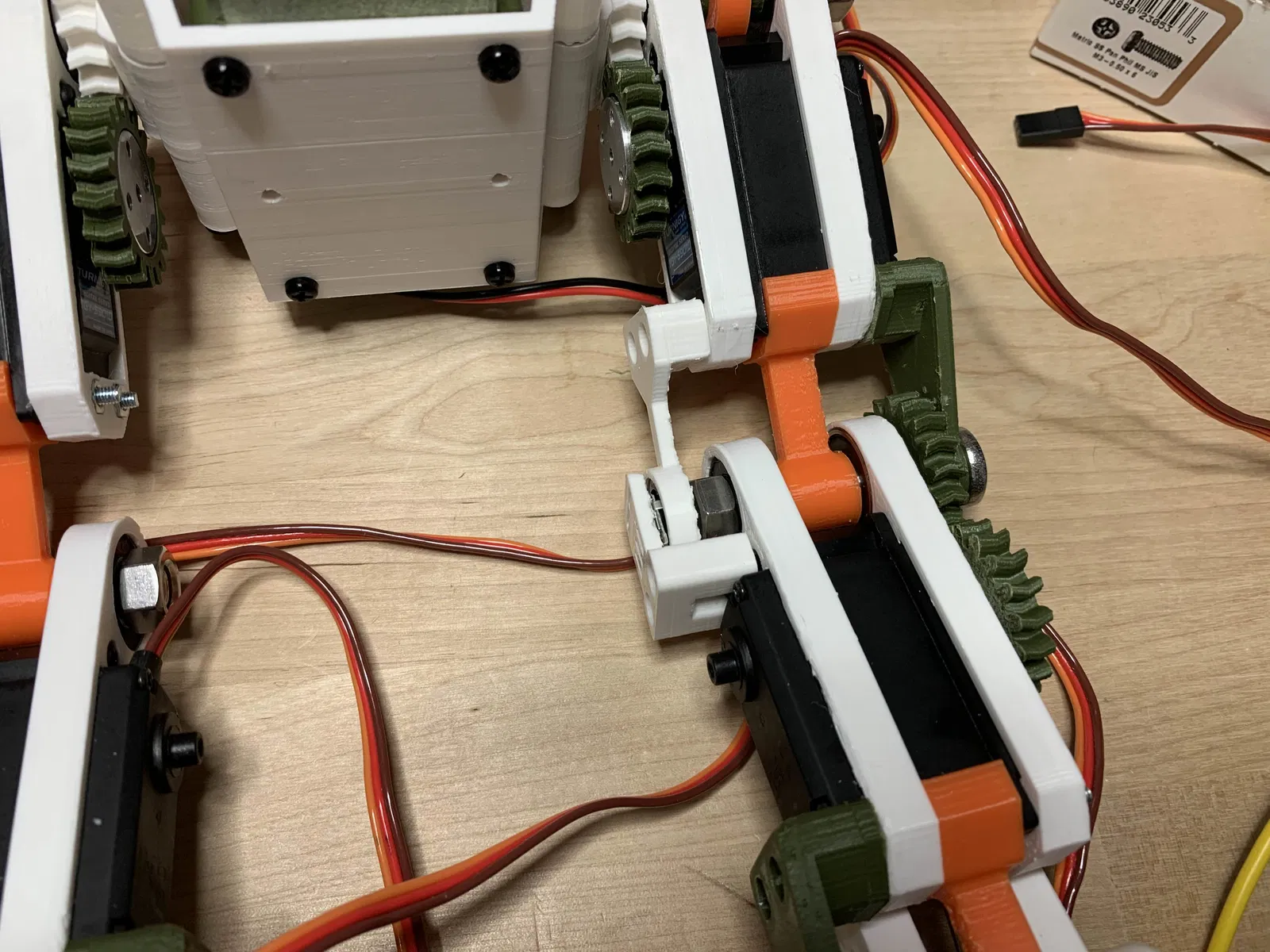
Đường link bên dưới là loại chiết áp (potentiometer) mà mình đang sử dụng cho bản nâng cấp này. Ý tưởng hiện tại là tích hợp thêm vào thiết kế sẵn có, việc này sẽ giúp mình đạt được độ phân giải cao hơn và mô phỏng chuyển động khớp chân thực hơn so với cách gắn servo mặc định.
https://www.amazon.com/dp/B08GLYFL3B
Nếu bạn quan tâm đến mẫu robot này, vui lòng ghé thăm trang web chính thức và kho lưu trữ github để biết thêm thông tin chi tiết.
Website: https://www.makerforge.tech/ Github: https://github.com/makerforgetech/modular-biped
Giấy phép

File mô hình





Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!