ROS Otto - Robot giáo dục thông minh và đầy thú vị

ROS Otto là phiên bản nâng cấp của robot Otto từ HP Robots, tích hợp micro-ROS giúp bạn tiếp cận dễ dàng với lập trình robot và AI. Mẫu thiết kế này hỗ trợ ROS2, cung cấp nhiều tính năng giả lập và điều khiển từ xa, mở ra không gian sáng tạo vô tận cho giáo dục.











Mô tả

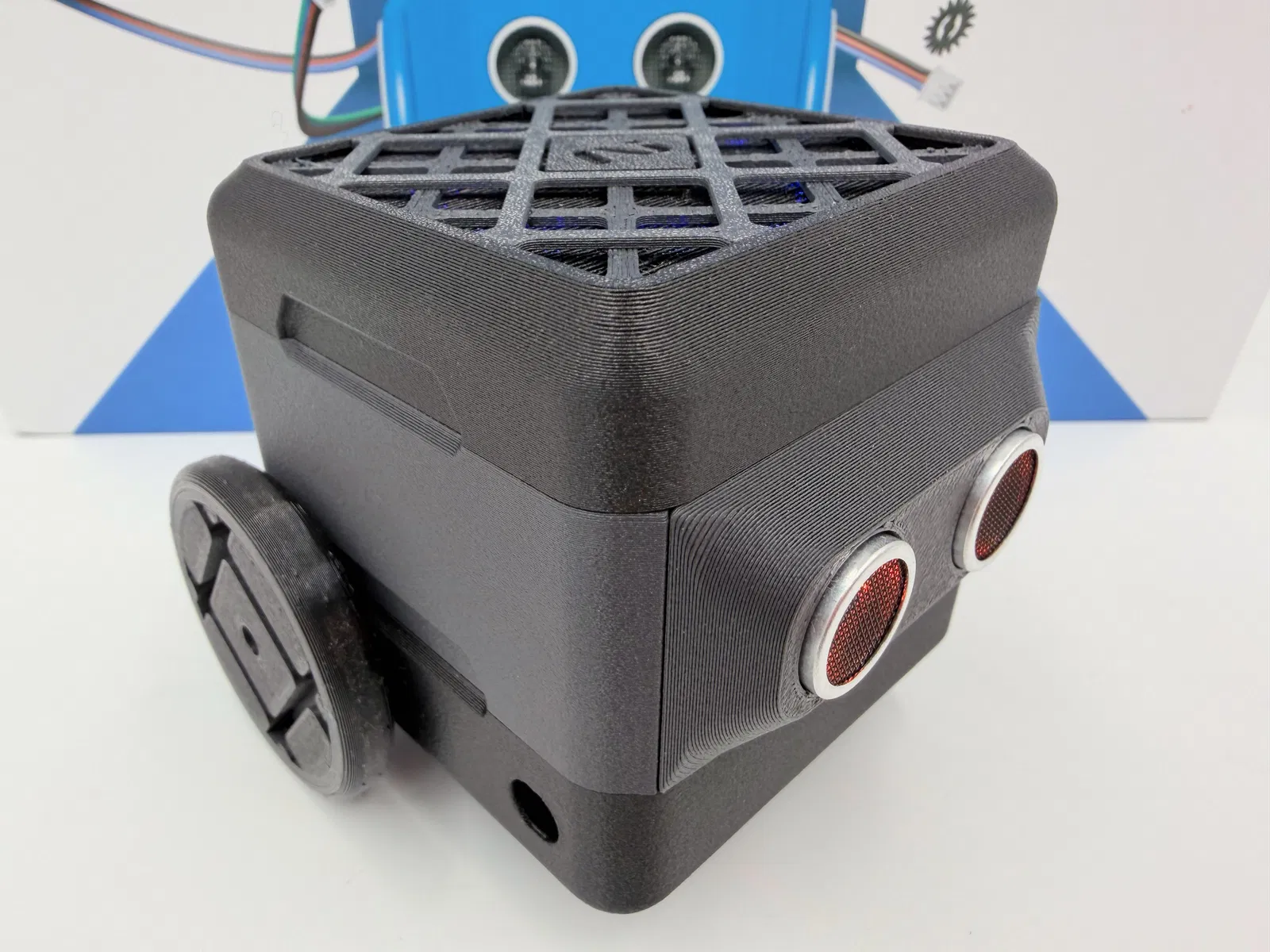
ROS Otto là một bản remix của robot giáo dục Otto từ HP Robots, hỗ trợ phần cứng và linh kiện điện tử của các bộ kit Otto Starter Builder hoặc Creator!
Thiết kế này được lấy cảm hứng từ HP ZGX Nano AI Station, một nền tảng NVIDIA GB10 giá trị tuyệt vời dành cho việc nghiên cứu, phát triển và giáo dục AI ở cấp độ nhập môn.
Bản remix này tương thích với firmware gốc và có đầy đủ các tính năng giống như mẫu ban đầu, nhưng mình đã thử thay đổi một chút để tạo sự mới lạ.
Tìm hiểu về AI và robot là sở thích của mình từ lâu. Khi nghĩ về việc tham gia cuộc thi HP Robots trên Printables, mình đã muốn kết hợp các yếu tố này lại cùng với chủ đề giáo dục và thương hiệu Hewlett Packard.
Môi trường mà HP Robots và Otto mang lại là một cánh cửa tuyệt vời cho các bạn học sinh muốn bắt đầu với lĩnh vực robot. Nhưng nếu chúng ta suy nghĩ xa hơn thì sao?
micro-ROS cho Otto
Otto sử dụng bộ vi điều khiển (MCU) dựa trên ESP32, vốn rất phổ biến và được hỗ trợ tốt bởi nhiều nền tảng nhờ chi phí thấp và tính khả dụng cao. Điều này bao gồm Robot Operating System (ROS) thông qua micro-ROS, cung cấp bộ công cụ SDK để xây dựng hỗ trợ cho các nền tảng dựa trên MCU.
Việc mang micro-ROS lên HP Otto dường như là một sự tiến hóa tự nhiên, vì nền tảng này có thể dễ dàng được sử dụng để dạy những kiến thức cơ bản về ROS. Ngoài ra, nó cũng có thể được mở rộng với các cảm biến, phụ kiện và các tùy chỉnh khác để giúp chú robot Otto của riêng bạn trở nên sống động hơn!
Dự án này hỗ trợ phiên bản ROS2 mới nhất là Jazzy Jalisco!

Phần mềm hỗ trợ dự án này có sẵn miễn phí trên github tại đây. Dự án được cấp phép theo MIT, vì vậy bạn có thể fork, tùy biến và mở rộng tùy theo nhu cầu, ví dụ như thêm hỗ trợ cho các bộ phận đi kèm trong các bộ kit mở rộng từ HP Robots.
Vì có một điểm xuất phát đầy đủ chức năng rất tiện lợi, dự án bao gồm cả tính năng điều khiển từ xa (teleoperation) và khả năng quan sát robot trong môi trường giả lập cùng lúc, với dữ liệu được trực quan hóa ngay trong trình mô phỏng. Bạn có thể chạy trực tiếp hoặc thông qua docker.
Ngoài ra, còn có một hoạt động lập bản đồ (mapping) cho phép bạn điều khiển từ xa chú robot và tạo bản đồ 3D cho một khu vực bằng các cảm biến siêu âm trong môi trường giả lập.
Dự án này mở ra nhiều khả năng giáo dục khi bạn sử dụng và mở rộng nó:
- Giới thiệu dễ dàng về ROS thông qua micro-ROS
- Robot và cảm biến đã được cấu hình sẵn, rất thú vị để nâng cấp thêm!
- Các ví dụ chức năng và điểm khởi đầu tuyệt vời
- Một chú Otto thì vui, vậy còn nhiều chú hơn thì sao?
- Các cảm biến đường kẻ đã có sẵn, chúng ta có thể làm gì với chúng nhỉ?
Nếu bạn thấy mẫu này hữu ích và muốn ủng hộ mình với tư cách là một người sáng tạo, hãy cân nhắc tham gia câu lạc bộ của mình trên Printables, dù chỉ là một tháng. Cảm ơn bạn rất nhiều!

Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình


Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!