Bộ Cửa Gió Tự Động Dùng Servo (Servo Automated Air Inlet/Outlet)

Tự thiết kế bộ cửa gió tự động cho hộp bao che máy in 3D sử dụng servo MG90S và Raspberry Pi. Giải pháp thông minh giúp kiểm soát nhiệt độ môi trường in cho các loại nhựa khác nhau như PLA, PETG, ABS hoặc Nylon.








Mô tả
Chào mọi người, vài ngày vừa qua mình đã thiết kế và thử nghiệm thành công bộ cửa gió (Air Inlet/Outlet) tự động dùng servo. Mình sẽ lắp nó vào hộp bao che (enclosure) cho máy in 3D để kiểm soát lượng không khí tươi (và mát hơn) đi vào bên trong bằng cách gửi tín hiệu đến mô-tơ servo MG90S giá rẻ từ Raspberry Pi. Tổng chi phí cho cả bộ cơ cấu này chắc chỉ khoảng 25€ → xem danh sách linh kiện để biết chi tiết nhé.
Chúc các bạn in ấn vui vẻ!
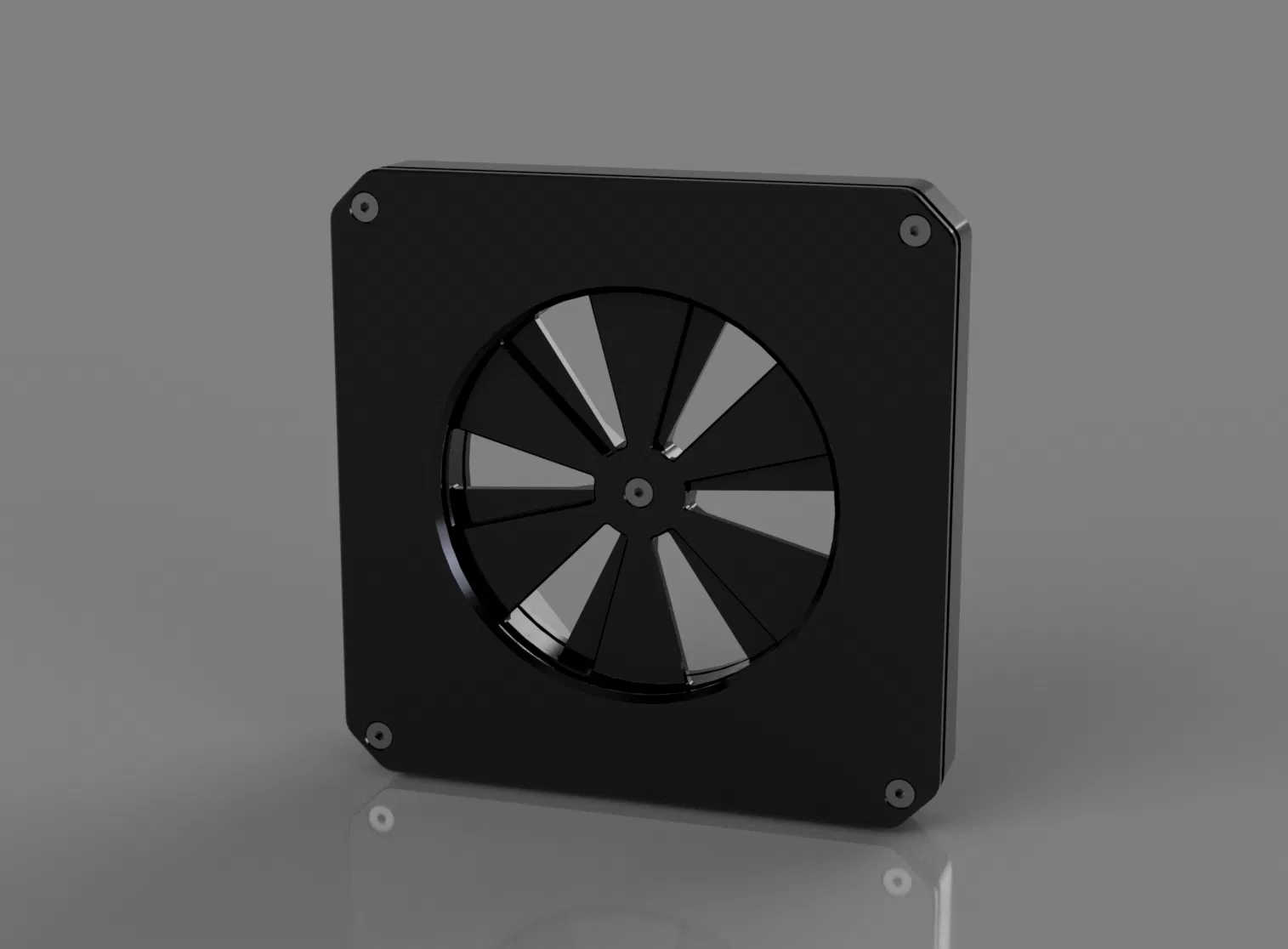
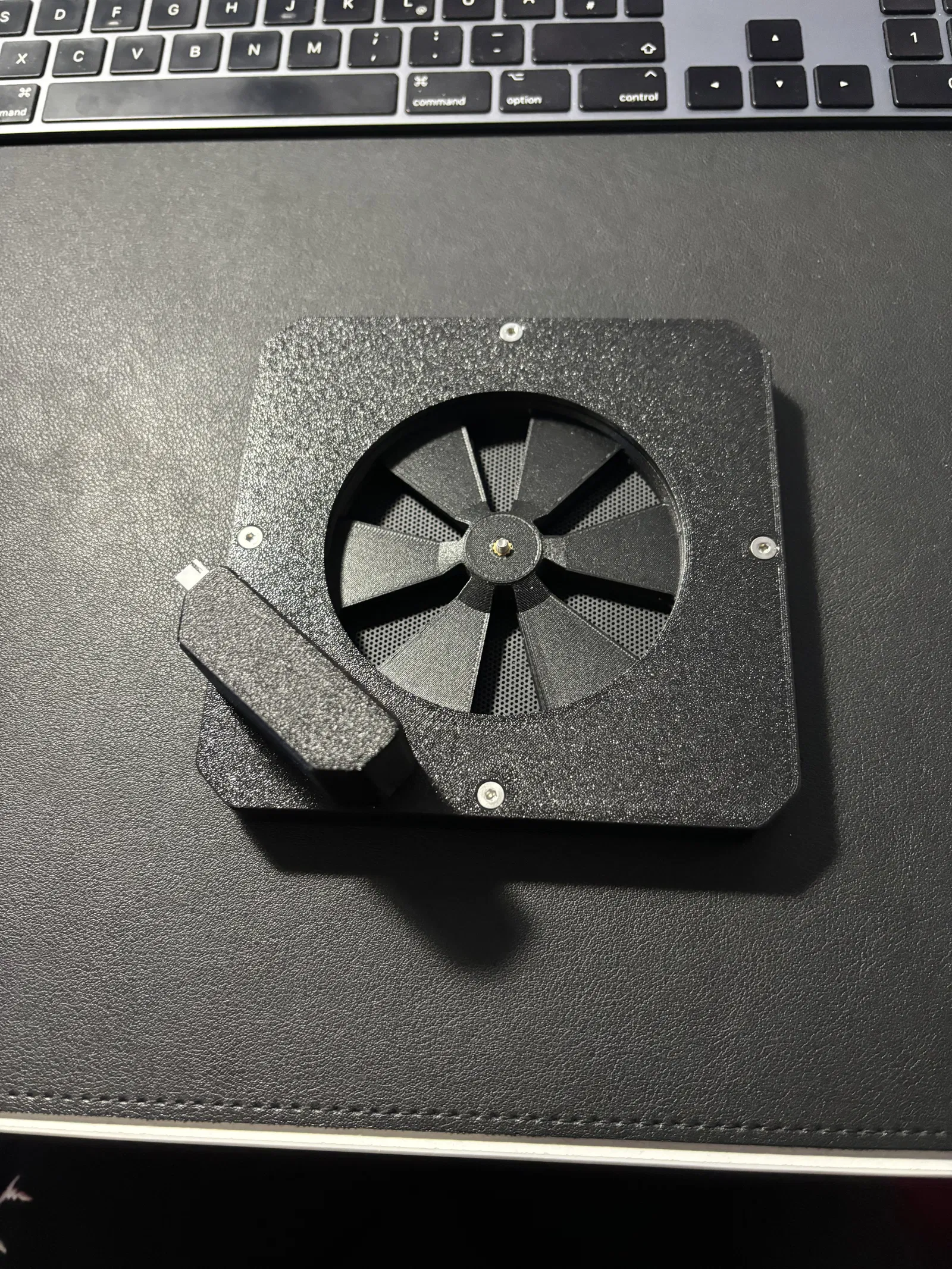
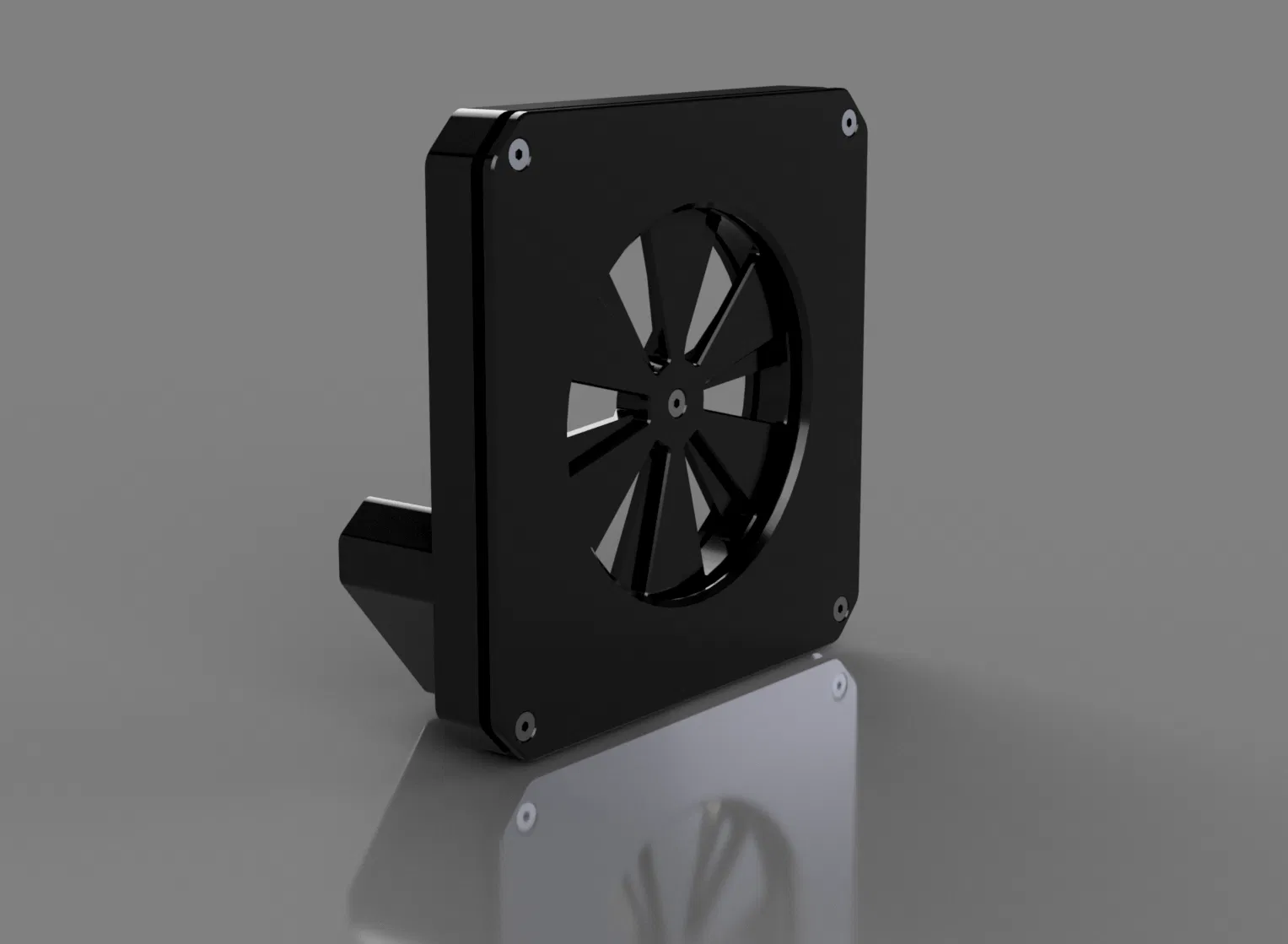
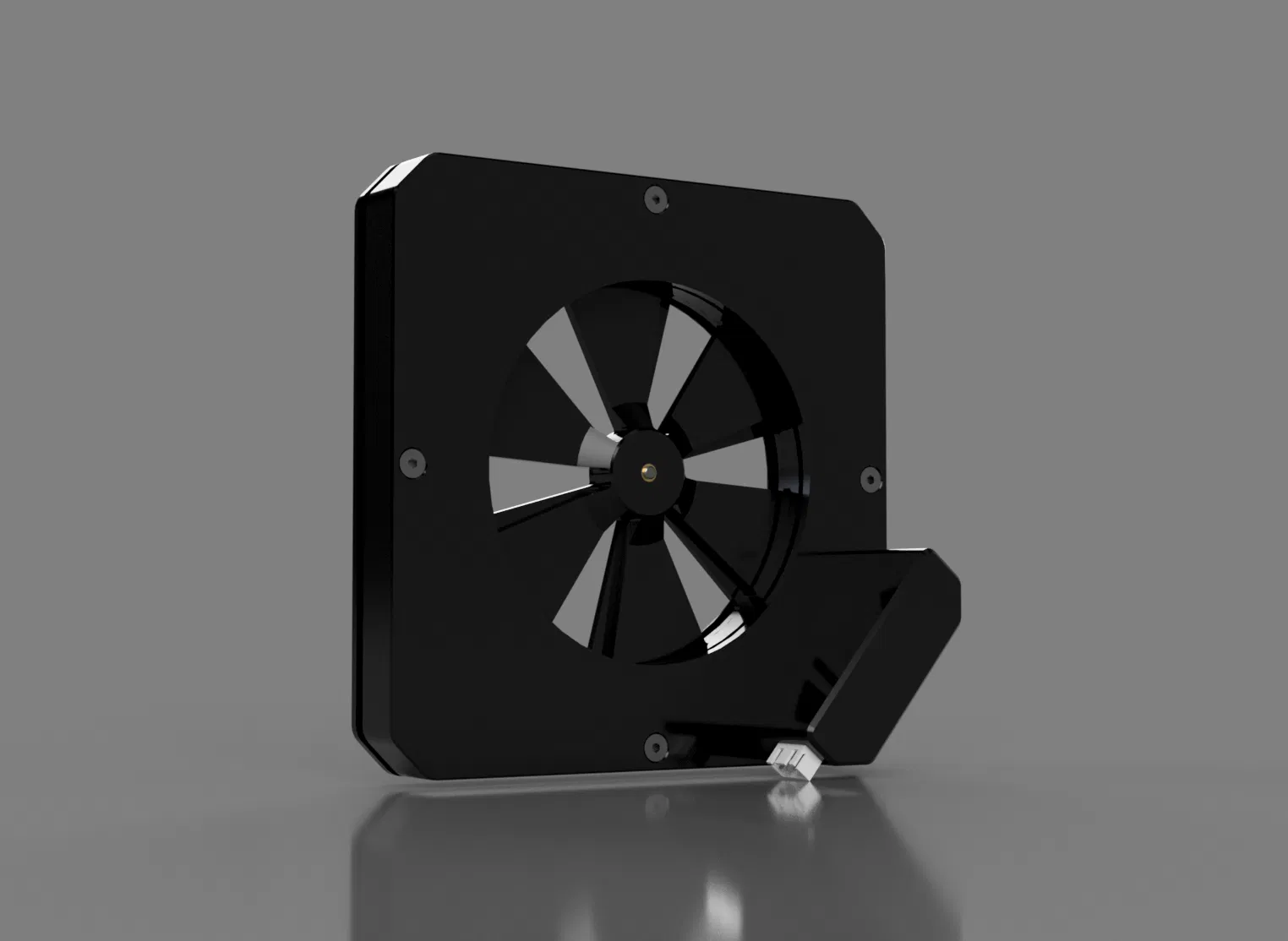
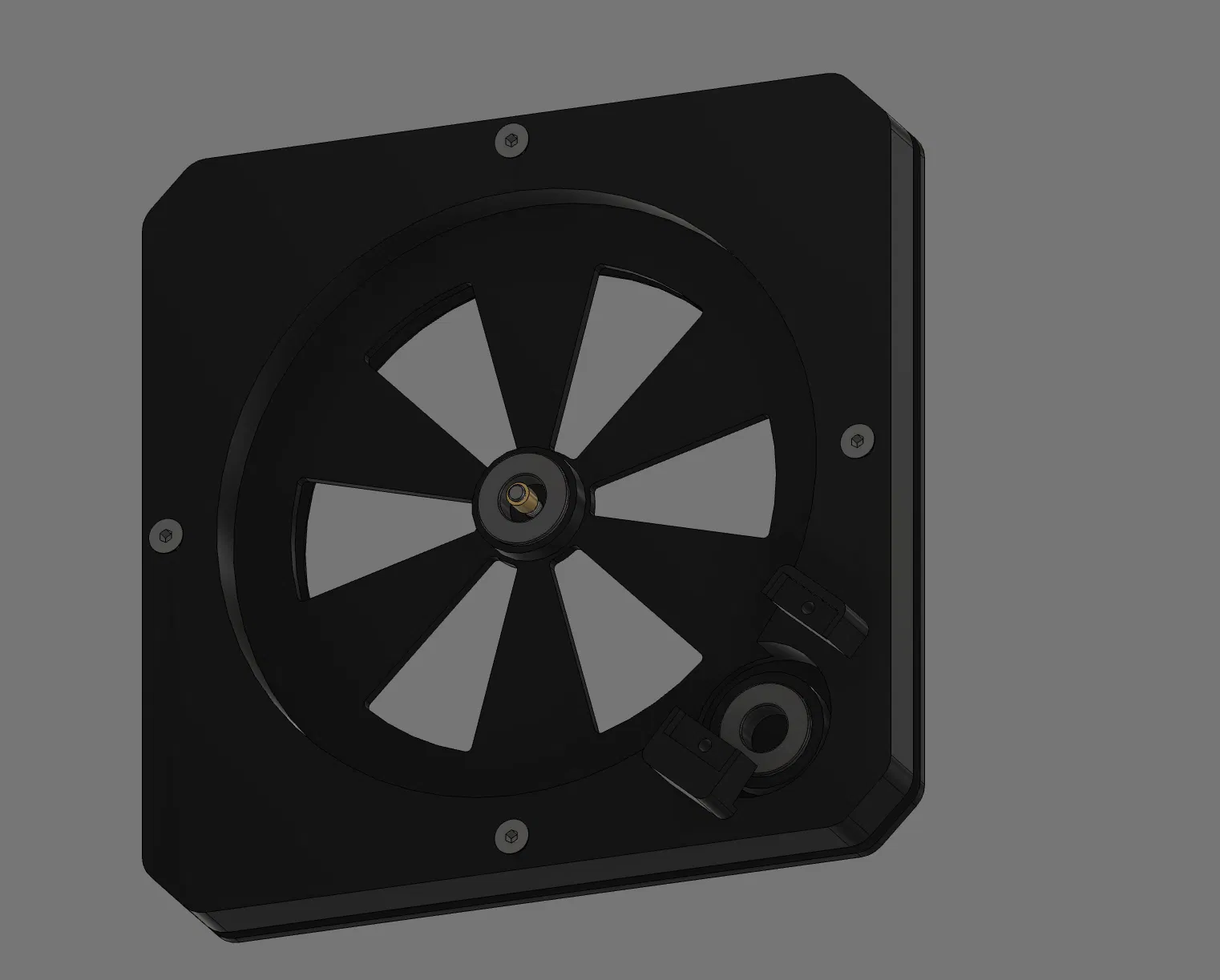
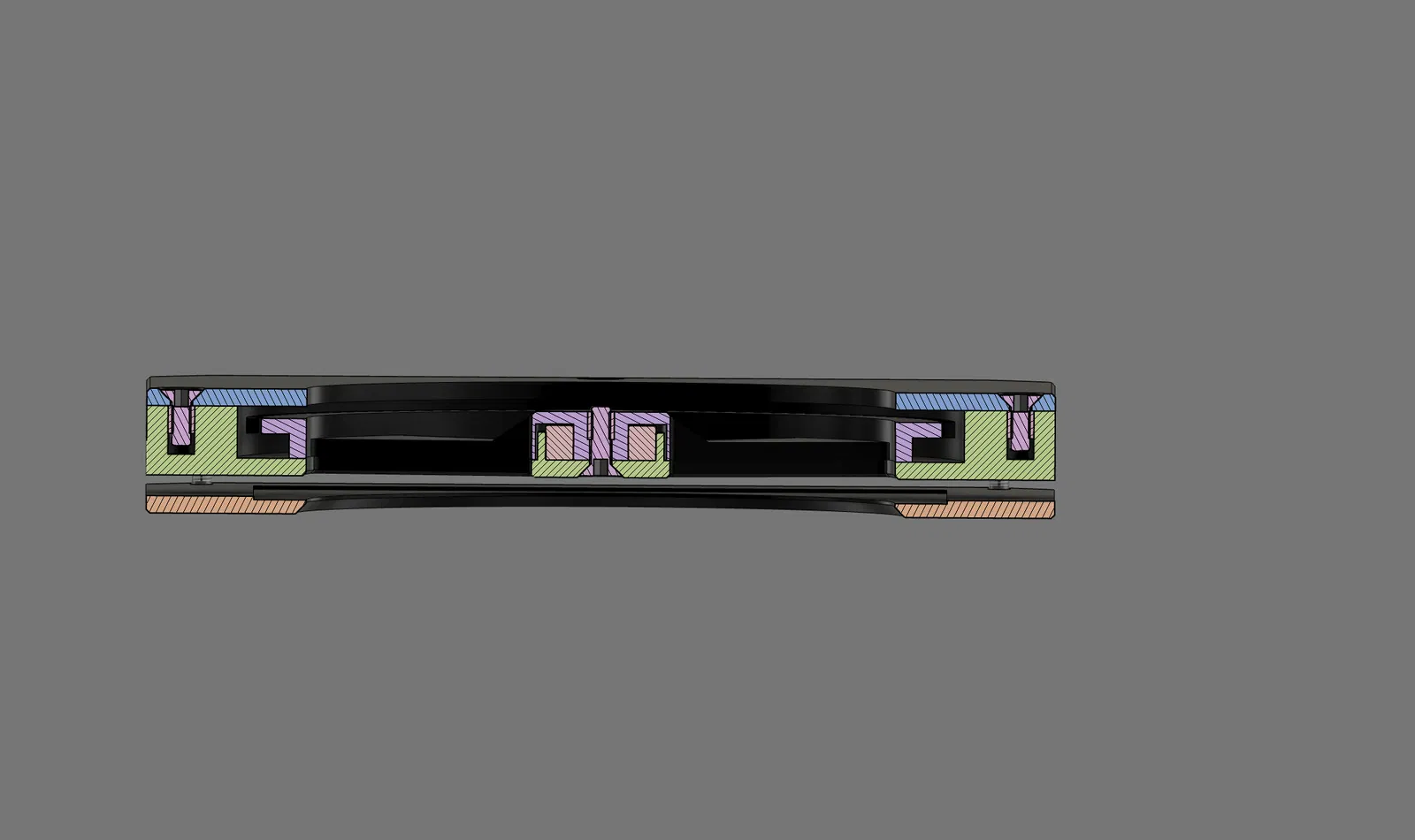
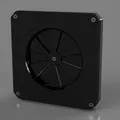
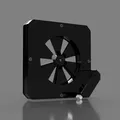
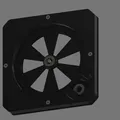
Bộ cửa gió này sử dụng mô-tơ servo MG90S tiêu chuẩn với tỷ số truyền 4.46 để có thể đóng mở hoàn toàn bằng một mô-tơ loại nhỏ. Bánh răng nhỏ 24 răng được gắn trực tiếp vào trục servo, sau đó truyền động cho bánh răng lớn hơn có gắn các cánh cửa. Các cánh này giúp kiểm soát kích thước khe hở trên thân chính, cho phép không khí lưu thông tùy thuộc vào chênh lệch áp suất giữa hai bên (ví dụ: áp suất bên ngoài hộp bao che cao hơn bên trong sẽ giúp hút không khí vào). Servo cần xoay khoảng 110 độ để đóng kín các khe hở và ngăn không khí đi qua. Tuy nhiên, do sai số sản xuất và không dùng gioăng cao su, vẫn có thể có một lượng nhỏ không khí lọt qua. Hy vọng trong tương lai, mình sẽ làm phiên bản thứ hai với độ kín tốt hơn khi đóng.
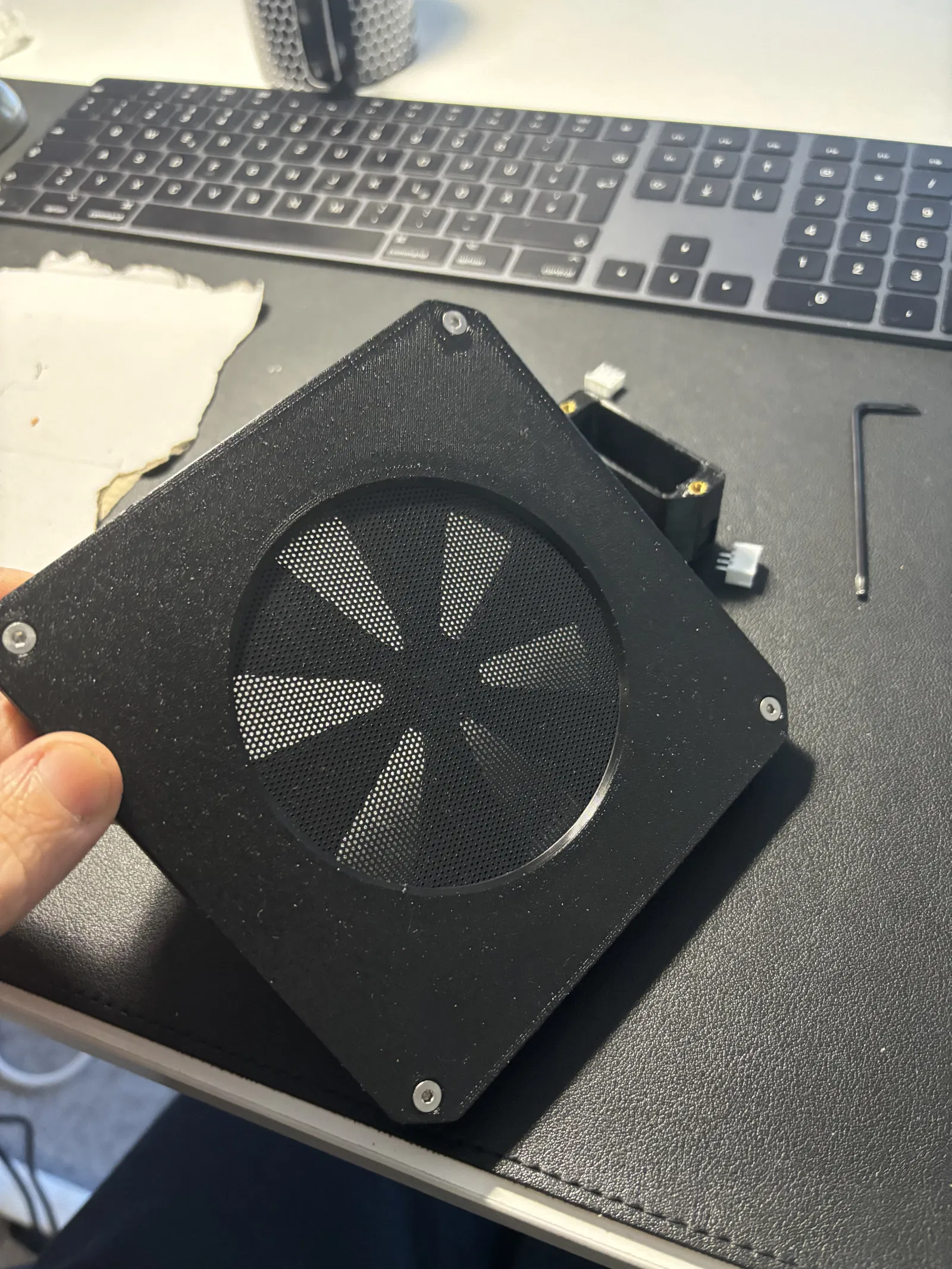
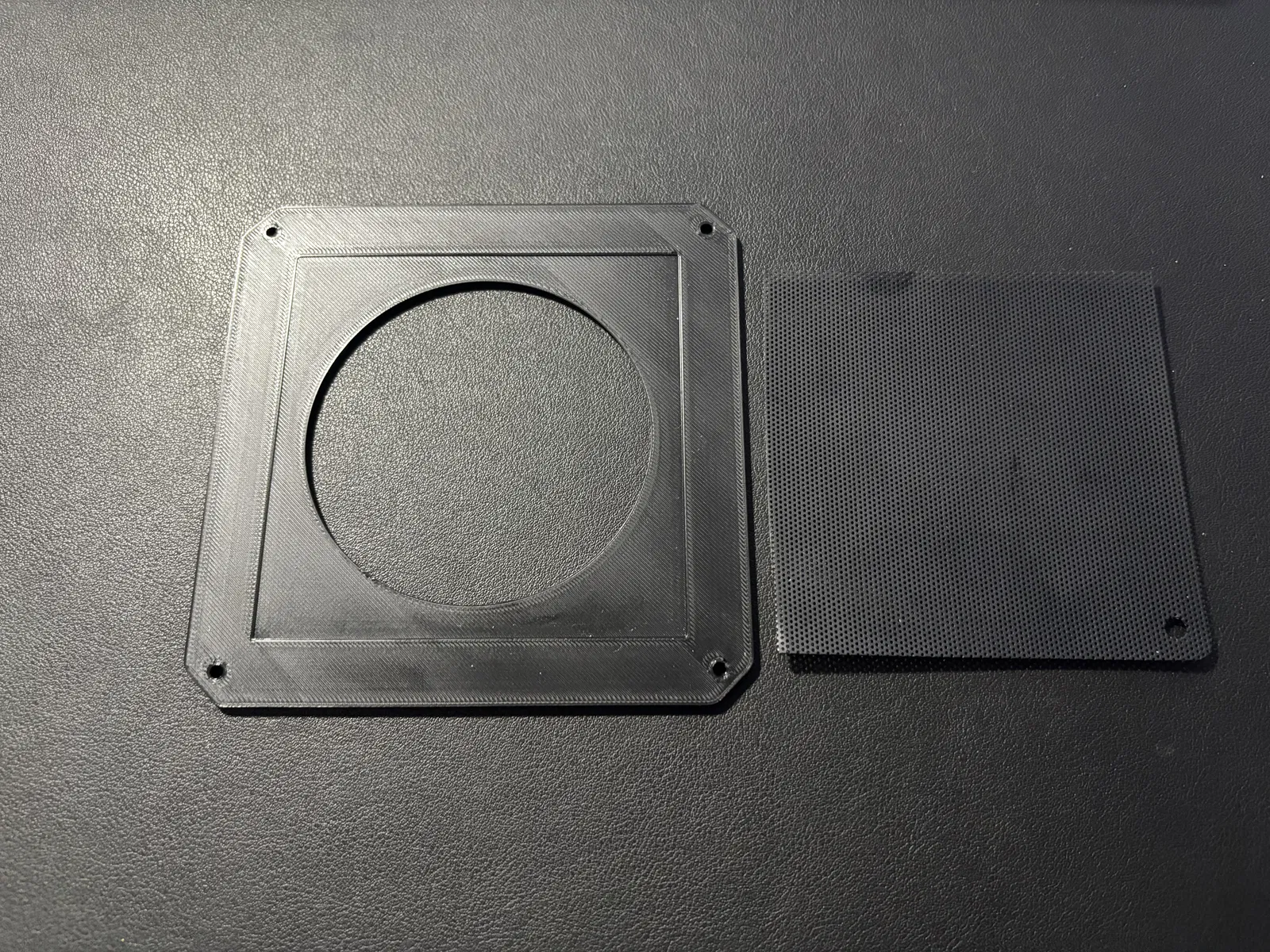
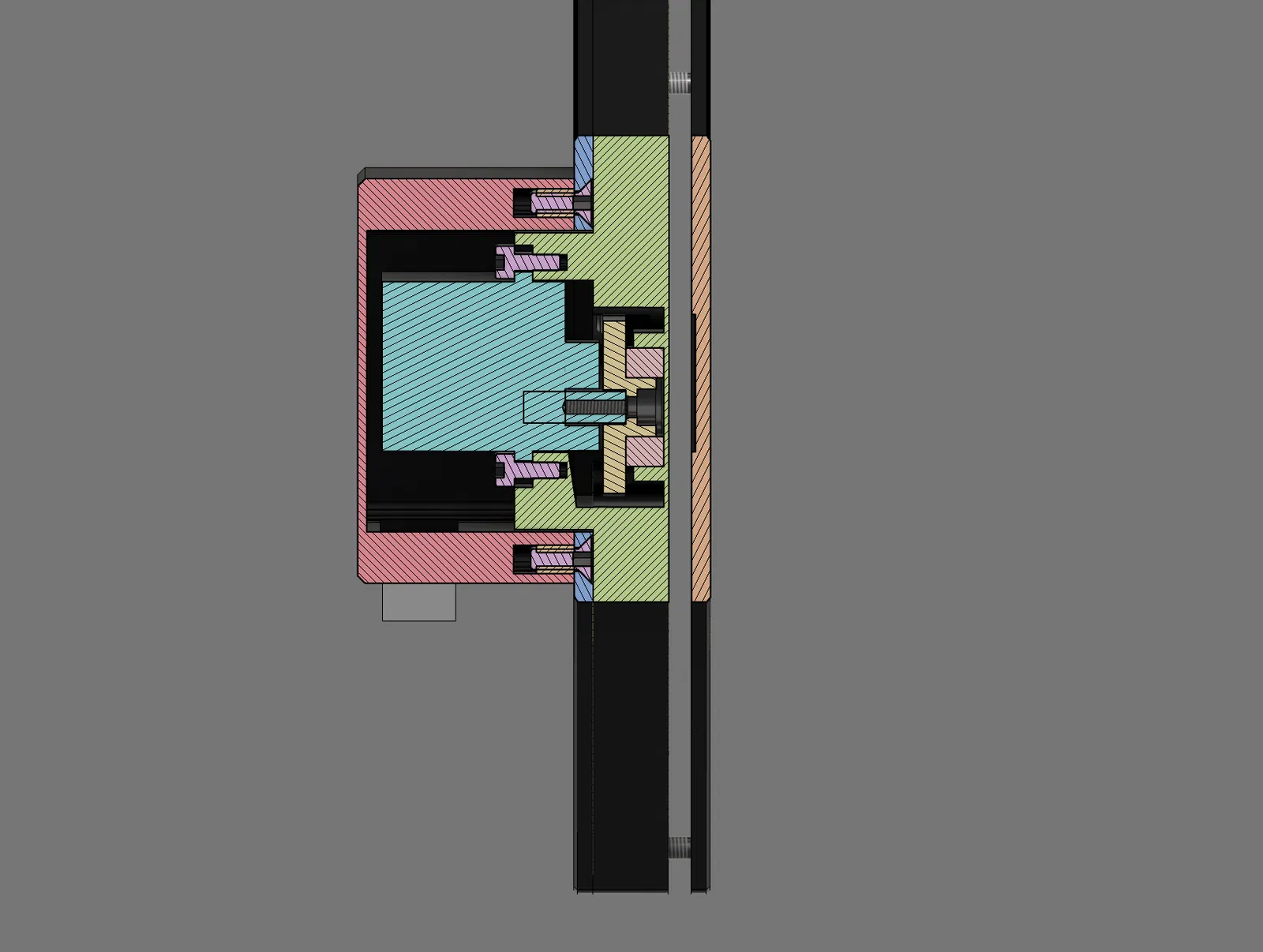
Vì mô hình này có thêm tấm mặt trước (front plate) để gắn lưới lọc bụi, bạn có thể lắp nó trên bất kỳ độ dày tường nào. Bạn chỉ cần chọn ốc vít có độ dài phù hợp để kẹp tấm mặt trước ở một bên và cơ cấu chính cùng servo ở bên kia. Mình đang dùng kính acrylic chống xước 3mm cho hộp bao che của mình.
Giải thích cách sử dụng:
Với hộp bao che của mình, mình lắp hai bộ cửa gió này ở một bên và gắn quạt cùng bộ lọc ALVEO3D ở bên đối diện. Việc này cho phép mình kiểm soát luồng khí mát đi vào tùy theo loại nhựa đang in. Mình có thể đóng cửa gió khi in ASA/ABS hoặc Nylon (cần nhiệt độ môi trường cao) hoặc mở ra khi in PLA hay PETG (cần nhiệt độ môi trường thấp hơn). Mình sử dụng hai bộ cửa gió để phân phối luồng khí quanh bàn nhiệt, tránh việc co ngót do luồng gió thổi trực tiếp. Quạt và lọc được gắn ở phía đối diện, ngay vị trí giữa phía trên.
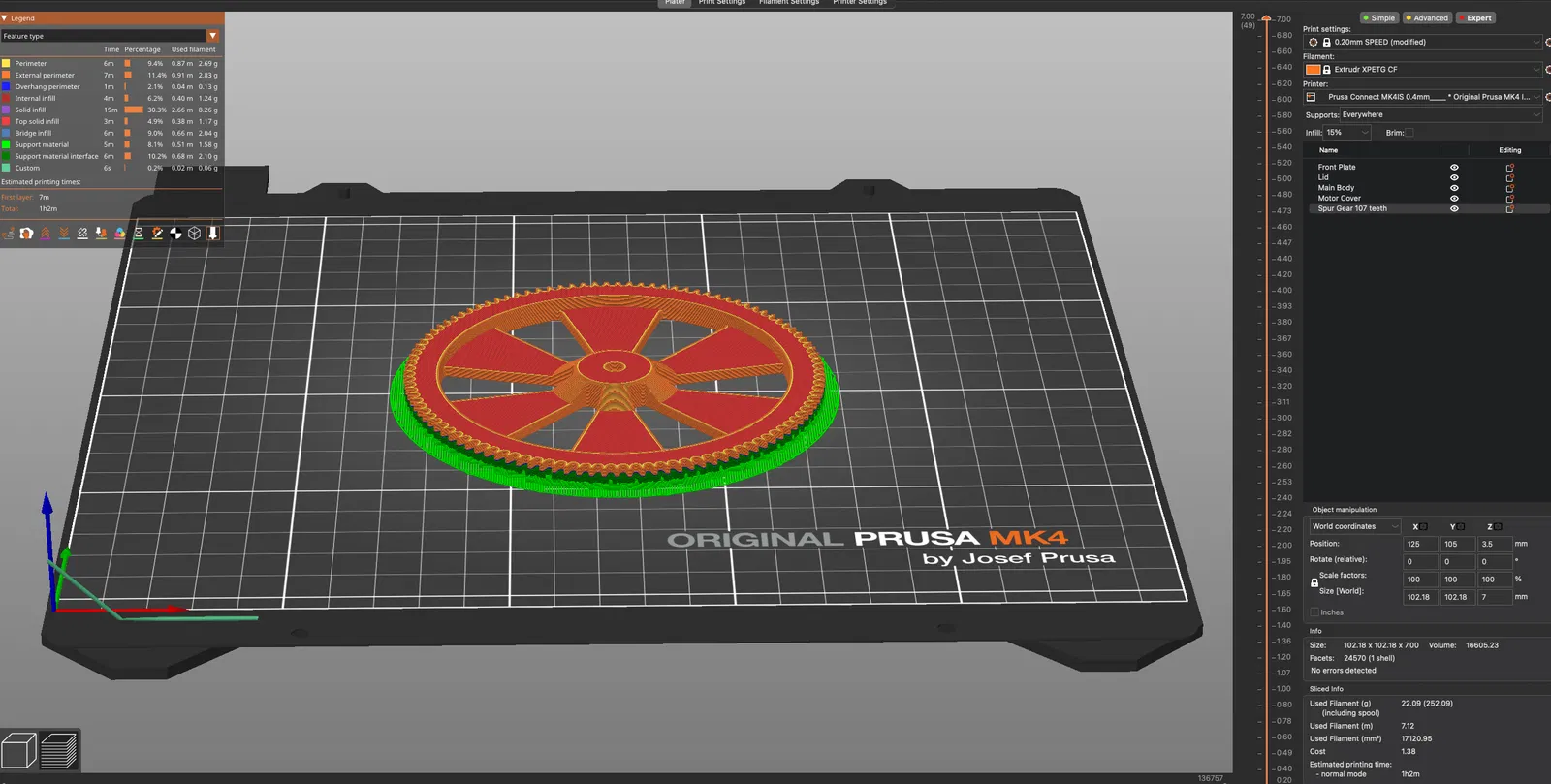
Hướng dẫn in:
Bạn có thể dùng nhựa PETG hoặc bất kỳ loại vật liệu nào có nhiệt độ nóng chảy cao hơn nhiệt độ bên trong/ngoài hộp bao che. Mình dùng PETG CF cho các bánh răng nhưng PETG thường vẫn ổn. Với bánh răng 24 răng, bạn nên dùng đầu phun (nozzle) 0.25mm để in các chi tiết nhỏ khớp với trục mô-tơ. Đừng cố vặn ốc quá chặt để giữ bánh răng thay cho kết nối form-fit vì nó rất dễ bị trượt và xoay sai vị trí cánh.
Khi in bánh răng lớn, hãy chú ý hướng in và sử dụng hỗ trợ (support) như hình minh họa. Với các phần khác, bạn có thể dùng cài đặt in thông thường với 3 lớp vỏ (wall) và ít nhất 15% infill. Độ dày lớp (layer height) cho bánh răng nên để tối đa 0.15mm, còn các bộ phận khác tùy ý (mình dùng 0.2mm).
Hướng dẫn lắp ráp:
- In đầy đủ các bộ phận và kiểm tra danh sách linh kiện trong file Excel đính kèm.
- Vệ sinh sạch các chi tiết in, đặc biệt là các vị trí gắn ổ bi và nơi bánh răng di chuyển.
- Nhấn các insert nhiệt (threaded inserts) vào hai mặt thân chính và nắp đậy mô-tơ.
- Lắp ổ bi vào. Tùy vào độ chính xác của máy in, bạn có thể cần dùng một chút lực để ép chúng vào vị trí.
- Hàn giắc cắm JST XH-3 vào mô-tơ bên trong nắp đậy. Việc này hơi khó vì không gian rất chật, mình cũng mất vài phút đấy. Để tránh làm nắp đậy quá cồng kềnh, mình giữ thiết kế nhỏ gọn. Hãy kiên nhẫn nhé, và có thể dùng keo nến để cố định dây điện cho chắc chắn.
- Mình có cung cấp file STEP, bạn có thể tự chỉnh sửa lỗ chờ nếu muốn dùng loại giắc kết nối khác.
- Luồn mô-tơ qua nắp và gắn nắp đậy mô-tơ bằng hai ốc M3x8.
- Gắn bánh răng 24 răng vào trục mô-tơ. Dùng con ốc đi kèm theo servo hoặc ốc M2/M2.5 tùy theo trục mô-tơ của bạn.
- Đặt bánh răng nhỏ cùng mô-tơ vào ổ bi. Vì không gian hẹp nên cần thao tác cẩn thận, sau đó vặn chặt mô-tơ bằng hai ốc M2.5x6.
- Phần khó nhất đã xong! Đặt bánh răng lớn vào sao cho khớp với các lỗ hở trên thân chính để cửa mở hết cỡ, đồng thời ăn khớp với bánh răng nhỏ. Dùng ốc M3x10 để cố định bánh răng lớn nhưng đừng vặn quá chặt để tránh gây cản trở cho servo.
- Đóng nắp và gắn bằng các ốc M3x8 còn lại.
- Kiểm tra lại cơ cấu bằng cách gửi xung PWM đến servo. Nếu dùng NodeRed, bạn chỉ cần copy code bên dưới.
- Cuối cùng, lắp bộ cơ cấu vào một bên vách và lắp tấm mặt trước (đã gắn lưới lọc bụi) vào phía đối diện. Bạn có thể cần một người hỗ trợ giữ giúp trong lúc vặn 4 ốc M3x8 cố định hai mảnh lại với nhau.
- Thế là xong! Bây giờ bạn đã có thể lập trình servo và tận hưởng thành quả rồi!

Mô tả tín hiệu Servo:
Bạn có thể lập trình cho servo bằng Arduino, Raspberry Pi... Trong trường hợp của mình, mình dùng Raspberry Pi với Node-Red để xuất tín hiệu PWM qua GPIO.
- Dây nâu: Ground
- Dây đỏ: 5V
- Dây cam: PWM Data
- GPIO Raspberry Pi phù hợp: 17, 27, 22, 5, 6, 26, 23, 24, 25, 16
- Tần số PWM: 50 Hz
- Duty cycle: 2%-12%. (0% giúp reset giá trị PWM để servo không bị rung).
Lưu ý: Sau khi gửi lệnh vị trí, cần gửi lại 0% sau khoảng 250ms để servo không bị rung.
Code JSON cho Node Red (copy và import vào NodeRed):
[...]
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình







Chưa có bản in nào được khoe. Hãy là người đầu tiên!
Chưa có bình luận nào. Hãy là người đầu tiên!