Tay cầm điều khiển BGB ESP32 CYD cho robot OTTO HP và các robot Bluetooth

Tay cầm điều khiển độc đáo sử dụng ESP32 CYD cho các robot Bluetooth. Bao gồm mã nguồn Arduino, thiết kế vỏ in 3D và tính năng hàng đợi lệnh hữu ích cho việc học lập trình trình tự.
















Mô tả
Tay cầm điều khiển của Brittle Gum Benchworks (BGB) sử dụng ESP32 CYD (Cheap Yellow Display) để làm thiết bị điều khiển từ xa cho các loại robot sử dụng Bluetooth cổ điển, chẳng hạn như QB của BGB và OTTO của HP Robots, cũng như bất kỳ robot nào hỗ trợ Bluetooth Classic (SPP). Lưu ý: BLE, ESP NOW và WiFi hiện chưa được hỗ trợ.
Các tính năng độc đáo thân thiện với robot chưa từng thấy trên các tay cầm khác.
-
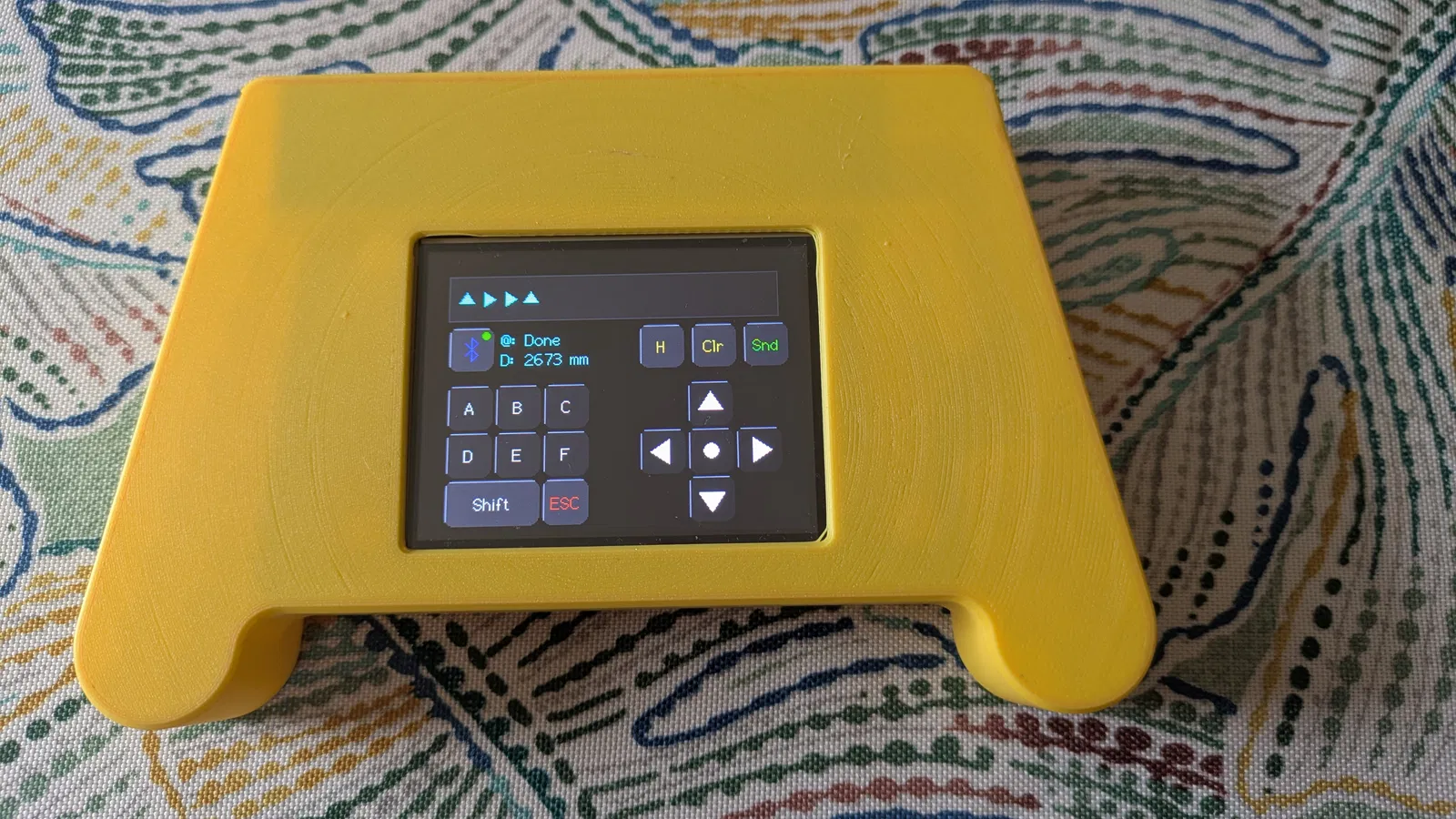
Màn hình hiển thị lịch sử/hàng đợi: Ở chế độ lịch sử (H), thiết bị hiển thị 12 lệnh gần nhất đã gửi cho robot; ở chế độ hàng đợi (Q), bạn có thể xếp hàng tối đa 12 lệnh và chỉ gửi đi khi nhấn nút [Send]. Không chỉ là một tay cầm thông thường, BGB Controller còn là công cụ dành cho những người mới bắt đầu lập trình. Chế độ Q giúp các bạn nhỏ làm quen với khái niệm lập trình căn bản về trình tự — robot sẽ không di chuyển cho đến khi "chương trình" được gửi đi, cho phép trẻ hình dung và dự đoán lộ trình của robot trước khi thực hiện.
-
Màn hình trạng thái: Hiển thị thông tin từ robot gửi về, ví dụ: các hoạt động hiện tại (đang tìm kiếm, đang quét, đang di chuyển, đang chờ), khoảng cách tới vật cản và dung lượng pin... CẢI TIẾN: Trong phiên bản đầu, màn hình trạng thái chưa làm mới đúng cách, lỗi này đã được khắc phục hoàn toàn.
-
6 nút bấm A-F dùng để kích hoạt các routine của robot – khi kết hợp với phím Shift, bạn có thể thiết lập lên đến 12 routine khác nhau.
Tay cầm cũng có 5 nút điều hướng (tiến, lùi, trái, phải và dừng) tương tự như các thiết bị điều khiển khác.
Nguyên lý hoạt động
Tùy vào nút được nhấn, tay cầm sẽ gửi các ký tự 8 (lên), 6 (phải), 2 (xuống), 4 (trái), 5 (giữa), các chữ cái thường a...f (A...F) hoặc chữ cái hoa A...F (“Shift” + A...F). Robot cần được lập trình để nhận các ký tự này qua BTSerial và phản hồi tương ứng. Mã ví dụ và hướng dẫn chi tiết đã bao gồm trong các tệp tải xuống.
Bao gồm trong tệp tải xuống:
-
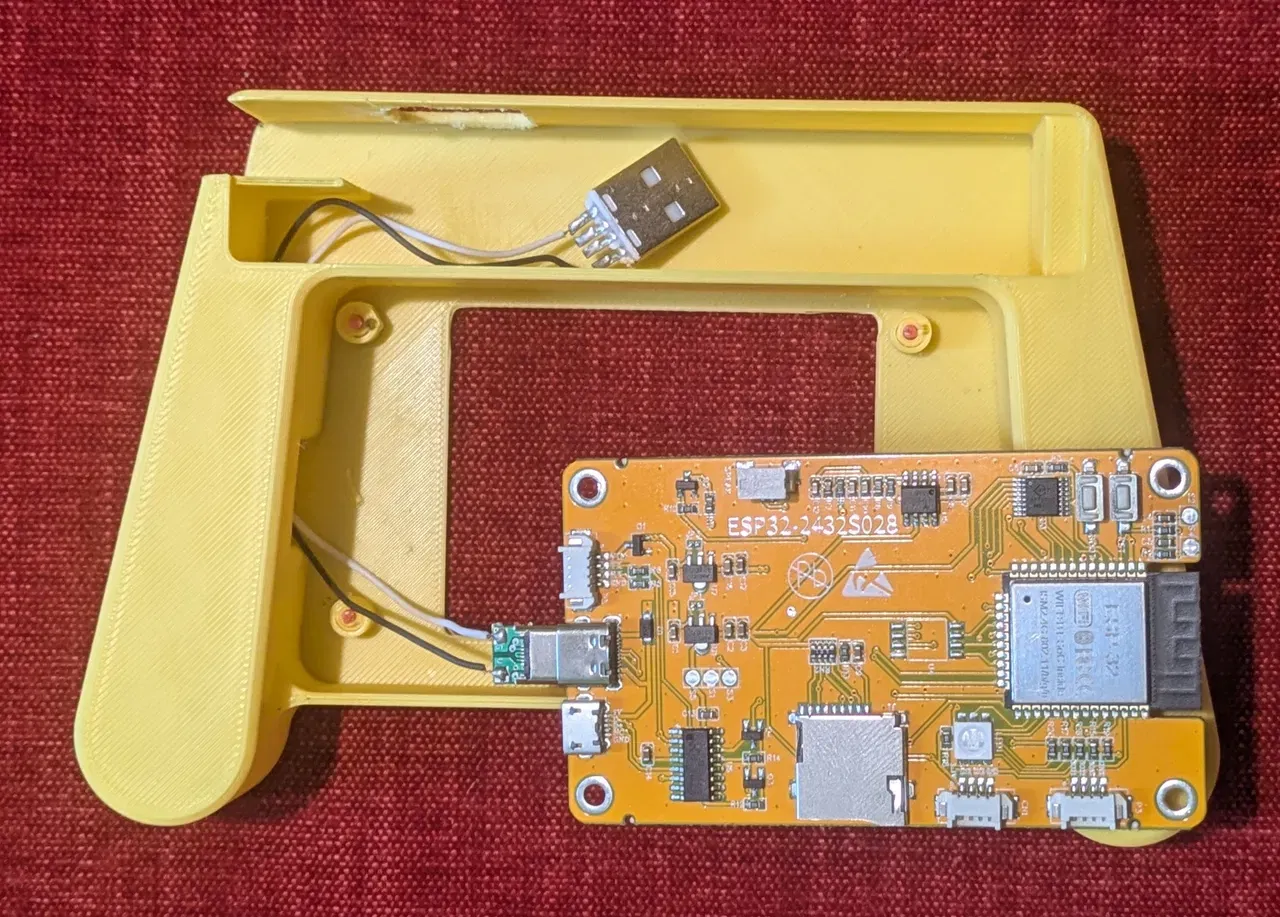
Mã Arduino cho thiết bị ESP32 CYD (trong BGB_CYD_Remote_V01.zip). Hãy đảm bảo đọc kỹ hướng dẫn trong tệp Read_Me_First.txt. Vì các bản clone ESP32 CYD có thể khác nhau, bạn cần tải đúng thư viện Arduino IDE và định nghĩa bo mạch, sửa các tệp Setup_CYD_Common.h và User_Setup_Select.h để mã hoạt động chính xác.
-
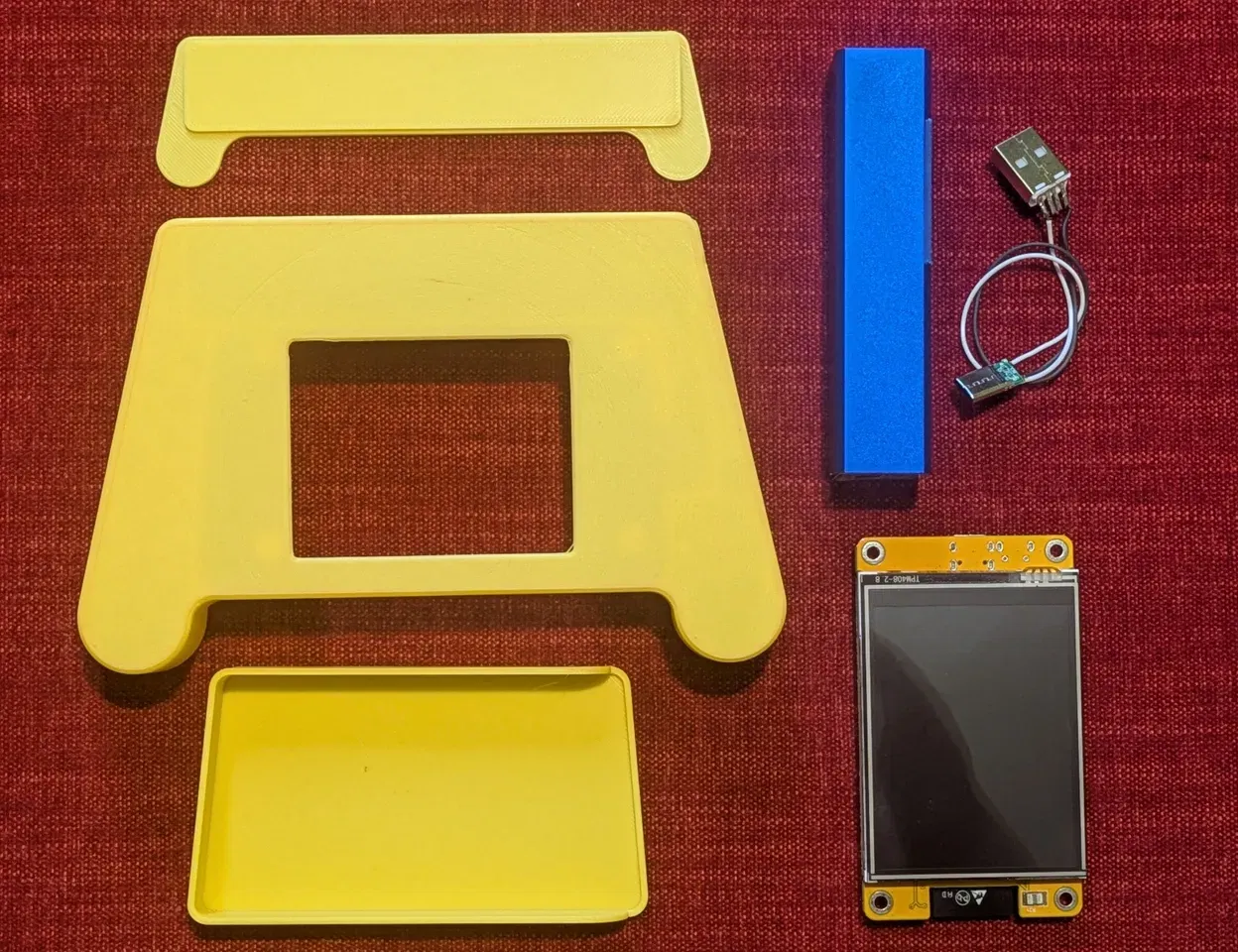
Các tệp STL cho vỏ máy, thiết kế để chứa ESP32 CYD và một viên pin dạng Veho Pebble. Bản cập nhật ngày 03-03-2026 giúp vỏ máy gọn gàng hơn, tối ưu cho việc in 3D và cửa sổ hiển thị vừa vặn với màn hình.
-
Hình ảnh về cách lắp ráp và hoạt động của tay cầm.
-
Hướng dẫn sử dụng và các đoạn mã cần thiết để robot giao tiếp thành công với tay cầm.
Xem thực tế:
Xem trang Facebook của BGB để xem tay cầm điều khiển robot nhảy "Hockey Pockey" trong thời gian thực: Video QB & BGB CYD Remote
Không có ESP32 CYD? Không sao cả!
Nếu bạn không có thiết bị này, tôi đã phát triển các tùy chọn khác như:
- Ứng dụng điều khiển trên Android (BGB Robot Controller): Giao diện tương tự, chạy trực tiếp trên điện thoại.
- Lập trình khối (BGB Blockly): Kéo thả logic dành cho người mới.
Xem tại: .
CẢI TIẾN: Các bản cập nhật ngày 6 tháng 3 năm 2026 đã sẵn sàng, nếu bạn tải trước đó thì hãy tải lại nhé.
Sử dụng tự do – Chia sẻ hào phóng – Ghi nhận đúng cách.
Jorge Garcia, PhD - Brittle Gum Bench Works. Ủng hộ tại: https://paypal.me/brittlegumbw. Giấy phép: GNU General Public License v3.0.
Giấy phép
File mô hình



Chưa có bản in nào được khoe. Hãy là người đầu tiên!
Chưa có bình luận nào. Hãy là người đầu tiên!