Bộ thiết kế 3D bàn chân robot Otto (Otto robot foot) bền đẹp

Bạn đang tìm kiếm linh kiện để hoàn thiện chú robot Otto của mình? Đây chính là bộ thiết kế bàn chân (Otto robot foot) được tối ưu hóa chuyên biệt, giúp robot của bạn đứng vững và di chuyển linh hoạt hơn. Với thiết kế chuẩn xác, bạn có thể dễ dàng in 3D bằng nhựa PLA hoặc PETG để đạt độ bền tối đa. Đây là phụ kiện không thể thiếu cho các dự án robot giáo dục, giúp các khớp nối servo hoạt động trơn tru và chính xác nhất. Hãy tải xuống tệp in ngay hôm nay để bắt đầu nâng cấp chú robot cá tính của riêng bạn.

Mô tả
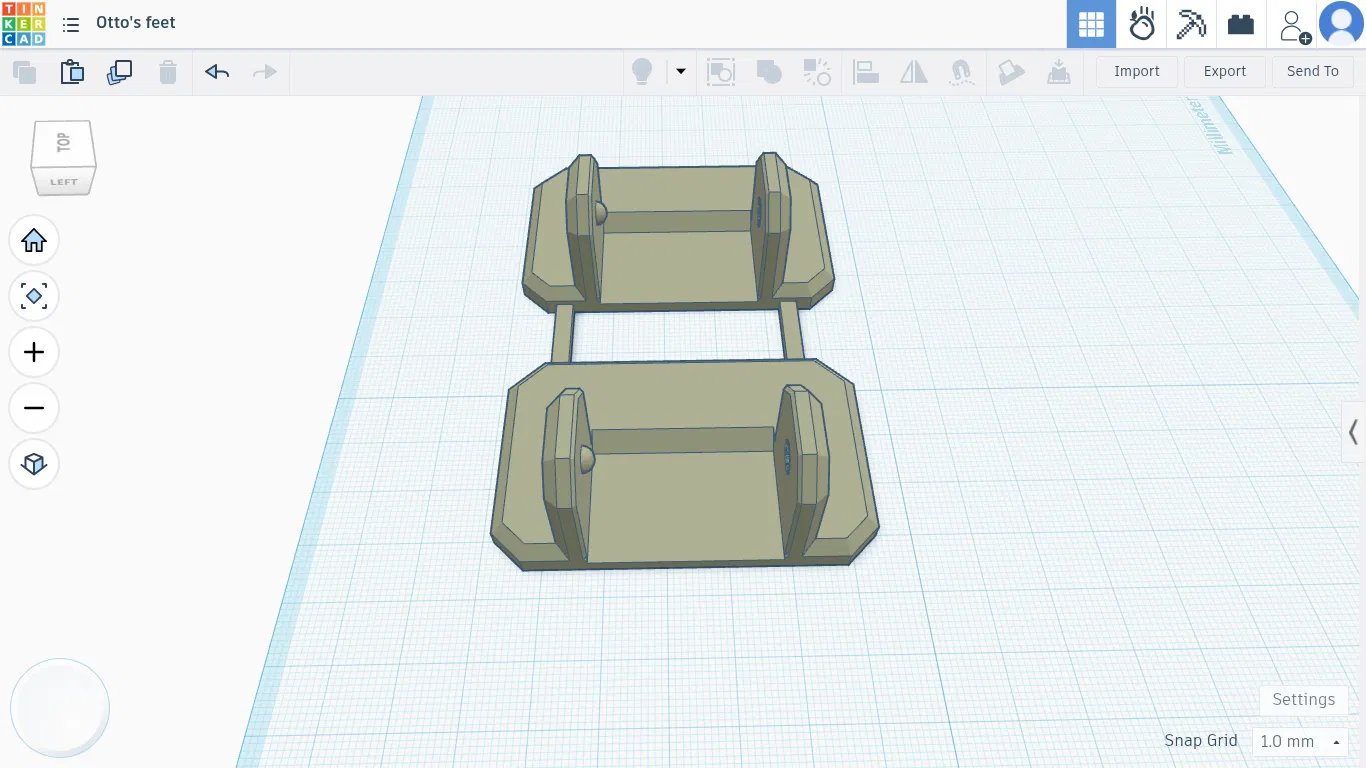
Phụ kiện bàn chân cho robot Otto (Otto robot foot) In 3D cực chuẩn
Nếu bạn đang tự tay lắp ráp một chú robot Otto vui nhộn thì chắc chắn không thể thiếu bộ phận quan trọng này. Đây là tệp thiết kế 3D chuyên dụng cho phần bàn chân (feet) của robot Otto, được tối ưu hóa để giúp robot đứng vững và di chuyển ổn định trên nhiều bề mặt khác nhau. Thiết kế này tập trung vào sự đơn giản, độ bền cao và tính tương thích hoàn hảo với các khớp nối tiêu chuẩn của dòng robot Otto mà cộng đồng makers vô cùng ưa chuộng.
Việc sở hữu một đôi chân được in 3D cứng cáp sẽ giúp cải thiện đáng kể khả năng cân bằng cho robot trong quá trình vận hành, nhất là khi thực hiện các bước đi hoặc các chuyển động phức tạp. Các lỗ trục được thiết kế chính xác để bạn dễ dàng gắn động cơ servo hoặc các khớp nối mà không cần phải gọt giũa hay chỉnh sửa nhiều sau khi in. Đây là lựa chọn lý tưởng cho các bạn học sinh, sinh viên hoặc những người mới bắt đầu làm quen với lĩnh vực robot giáo dục và in ấn 3D.
Một số thông tin hữu ích và mẹo khi in 3D bộ phận này:
- Chất liệu khuyến nghị: PLA hoặc PETG là lựa chọn tốt nhất nhờ độ cứng cáp và dễ in, giúp bàn chân giữ được form dáng chuẩn.
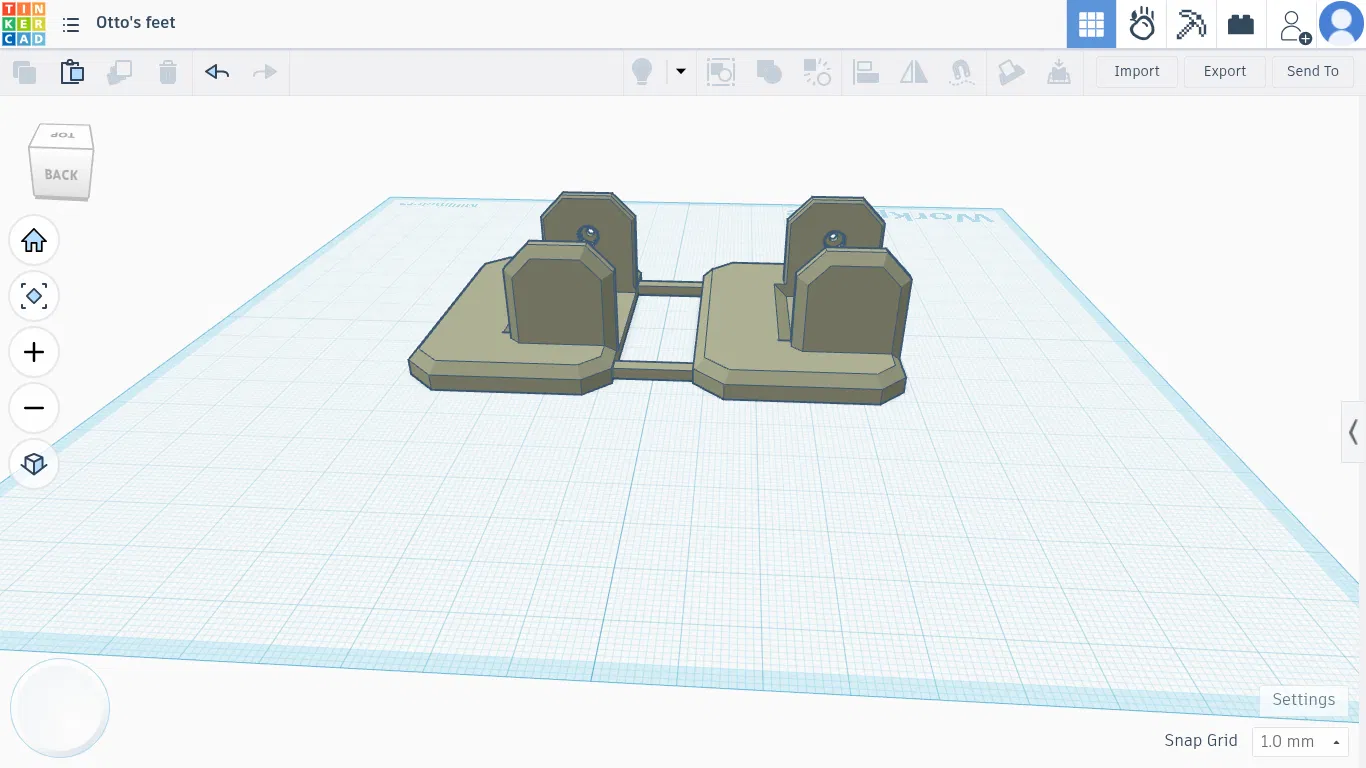
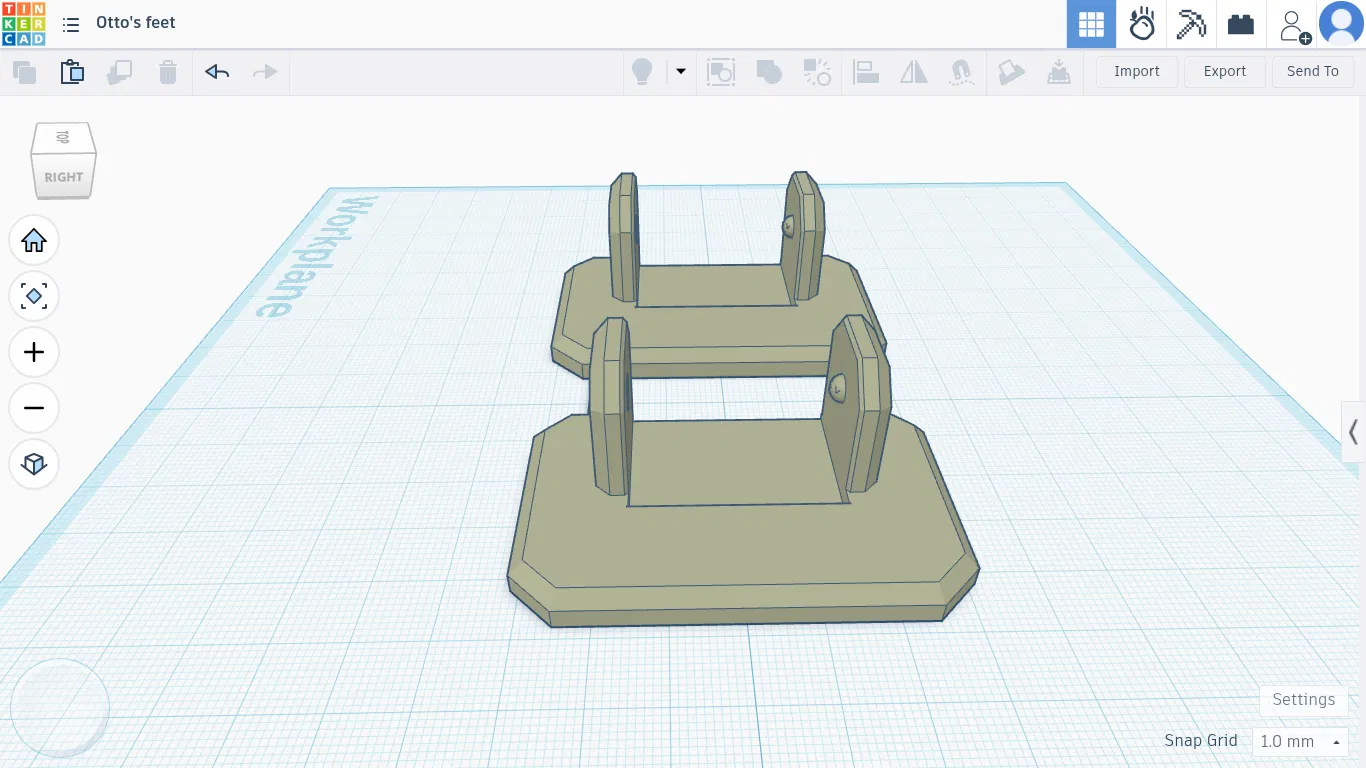
- Cấu trúc thiết kế: Đôi chân có phần đế rộng, giúp phân bổ trọng lượng đồng đều, tạo sự ổn định tối đa cho robot.
- Độ dày lớp in (Layer height): Nên đặt ở mức 0.2mm để đạt được sự cân bằng giữa tốc độ in và độ mịn của bề mặt.
- Hỗ trợ (Support): Do thiết kế có phần hốc gắn khớp, bạn có thể cần thêm một chút hỗ trợ (support) khi in để đảm bảo phần lỗ trục đạt độ tròn và chính xác nhất.
- Tùy chỉnh: Bạn có thể in bằng nhiều màu sắc khác nhau để chú robot Otto của mình trông cá tính và độc đáo hơn.
- Lưu ý lắp ráp: Hãy kiểm tra kỹ các lỗ trục trước khi gắn servo để đảm bảo không bị kẹt, giúp các chuyển động của robot sau này được mượt mà hơn.
Hy vọng mẫu thiết kế bàn chân này sẽ giúp dự án lắp ráp robot của bạn hoàn thiện một cách xuất sắc nhất. Chúc bạn có những giờ phút sáng tạo thật vui vẻ cùng chiếc máy in 3D của mình!
Giấy phép

File mô hình

Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!