Bàn tay poseable siêu chắc cho Dummy 13 scale 200%

Bàn tay poseable cho Dummy 13 scale 200% với khớp cực chắc, tối ưu in layer 0.1 và nozzle 0.4mm. In được PLA nhưng khuyến nghị PETG. Dễ lắp ráp, ma sát tốt, pose mượt và cầm đồ ổn.
























Mô tả
Mấy mẫu tay/ngón Dummy 13 poseable khác mình thử ở scale 200% không ổn lắm: ngón bị tách quá xa, với lại in bằng đầu phun 0.4mm không “ăn” một cách ổn định. Mình có tham khảo một mẫu cũ làm hướng dẫn, nhưng bộ ngón này mình thiết kế lại từ đầu để in cho Dummy 13 200% với layer height 0.1 và nozzle 0.4mm. In PLA vẫn dùng được, nhưng ưu tiên PETG hơn. Các khớp bấm (snap) vào nhau rất chắc, gần như không tuột ra trừ khi bạn cố kéo mạnh thiệt mạnh.
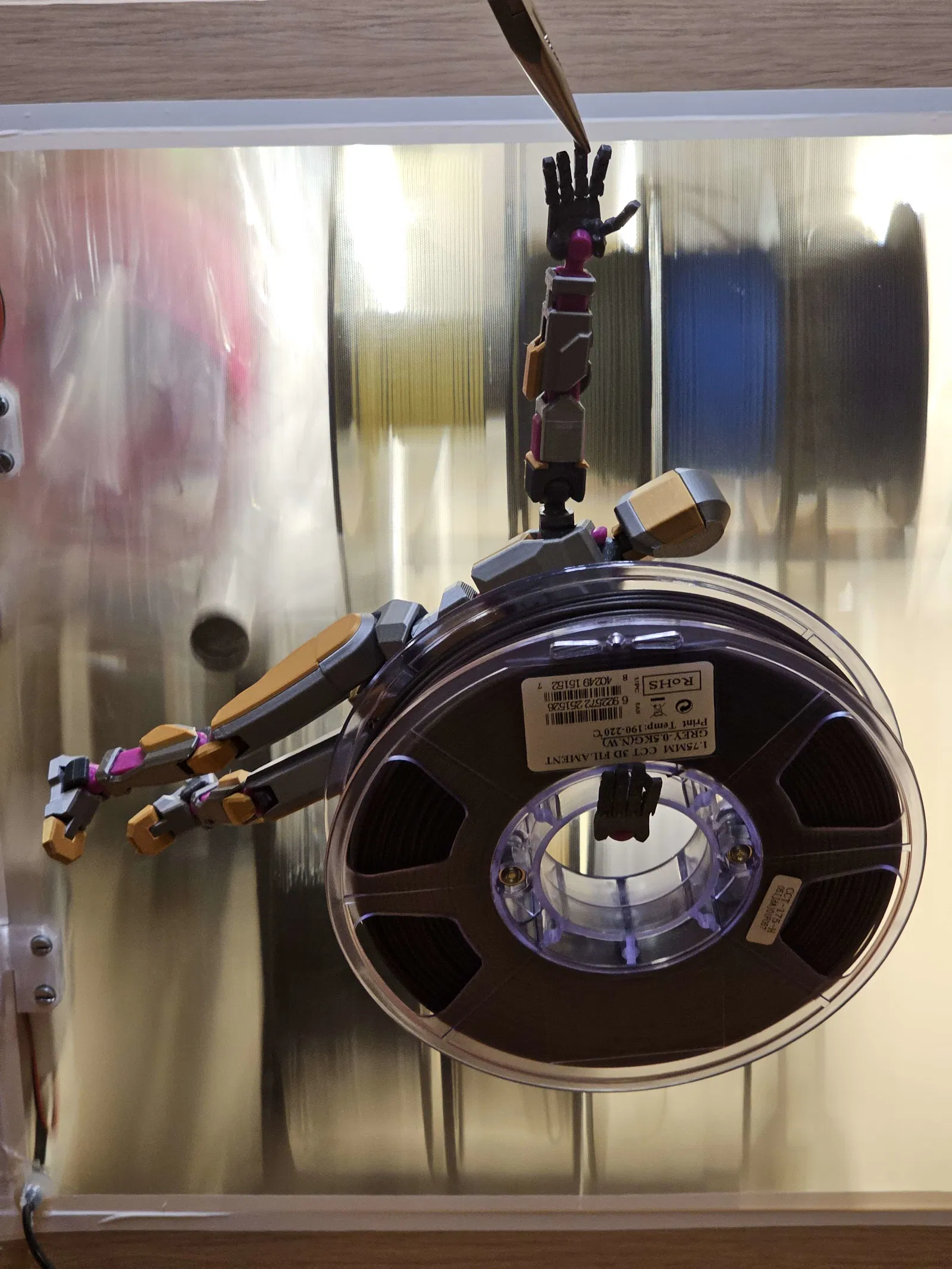
Trong một tấm hình, mình kẹp một đầu ngón bằng kìm rồi treo thêm cuộn filament 0.5kg làm tạ—thậm chí còn có thể treo nặng hơn nữa! Mình mất nhiều tháng redesign, in đi in lại để tăng độ bền, giữ ma sát, và vẫn đảm bảo biên độ chuyển động tốt.
Để làm lòng bàn tay phải (right hand palm), bạn dùng slicer để mirror từ lòng bàn tay trái. Mình thấy kết quả tốt nhất khi in từng cái palm một, nhưng nếu máy bạn cân được in cả hai cùng lúc thì quá ngon.
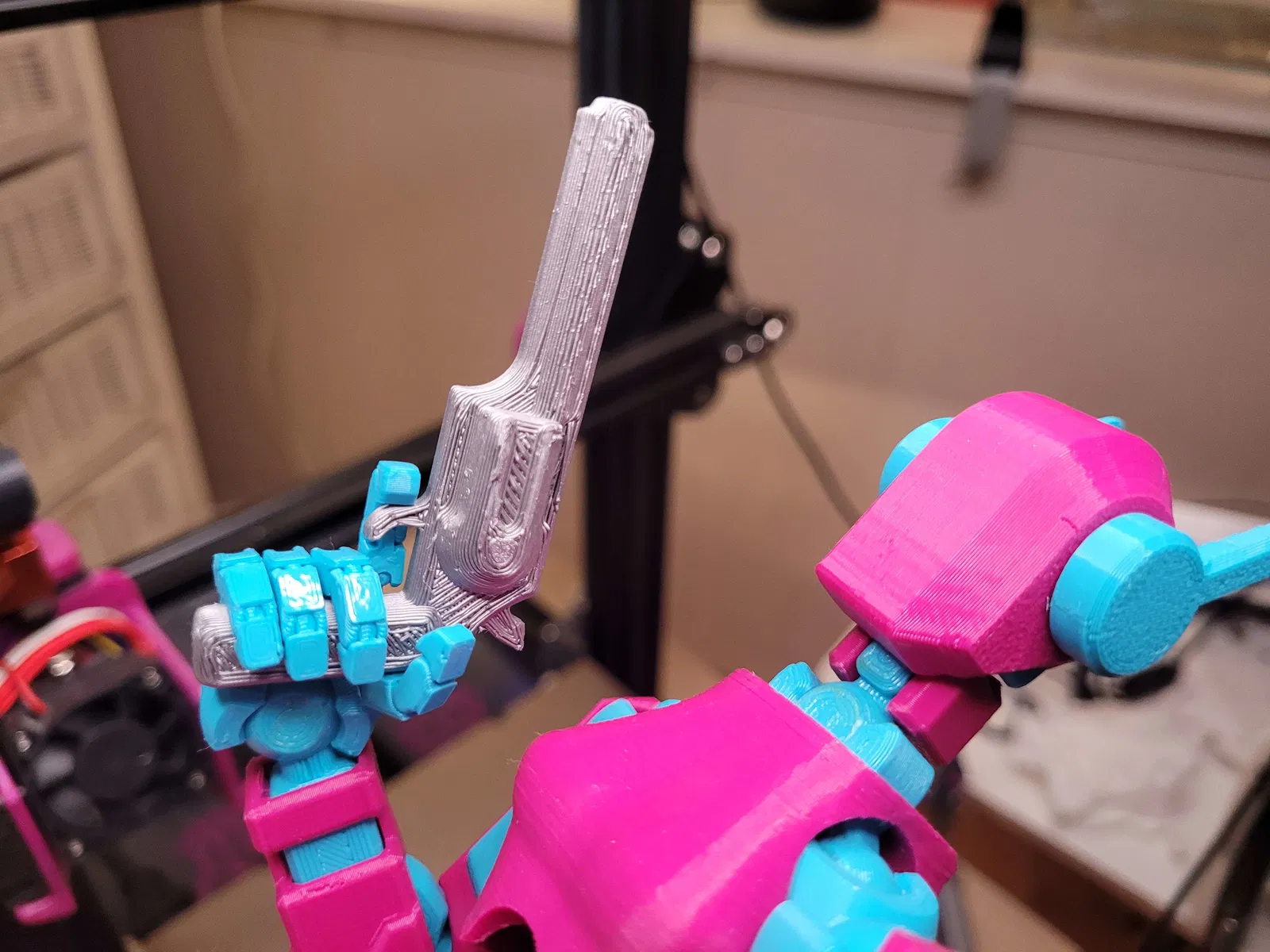
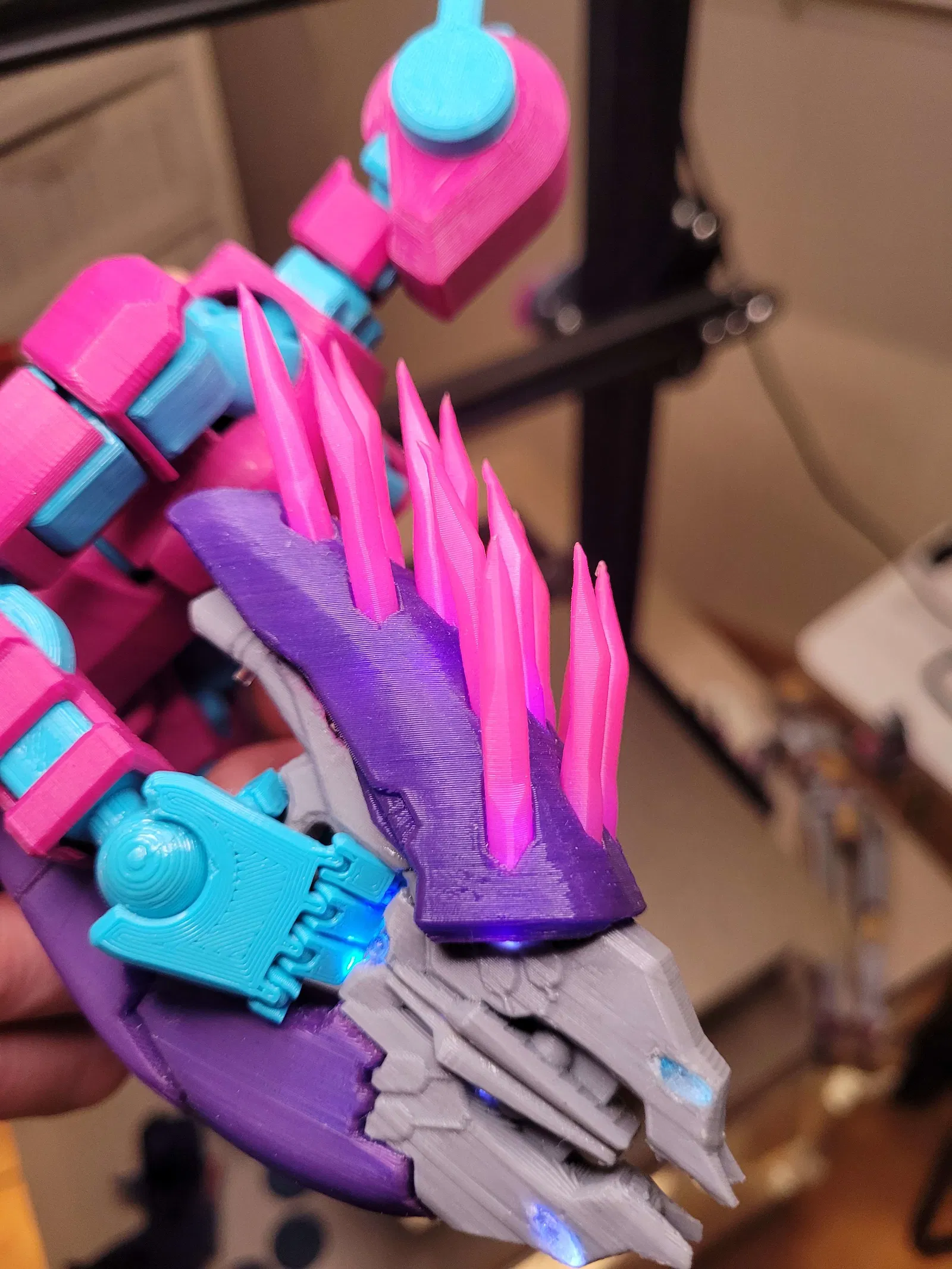
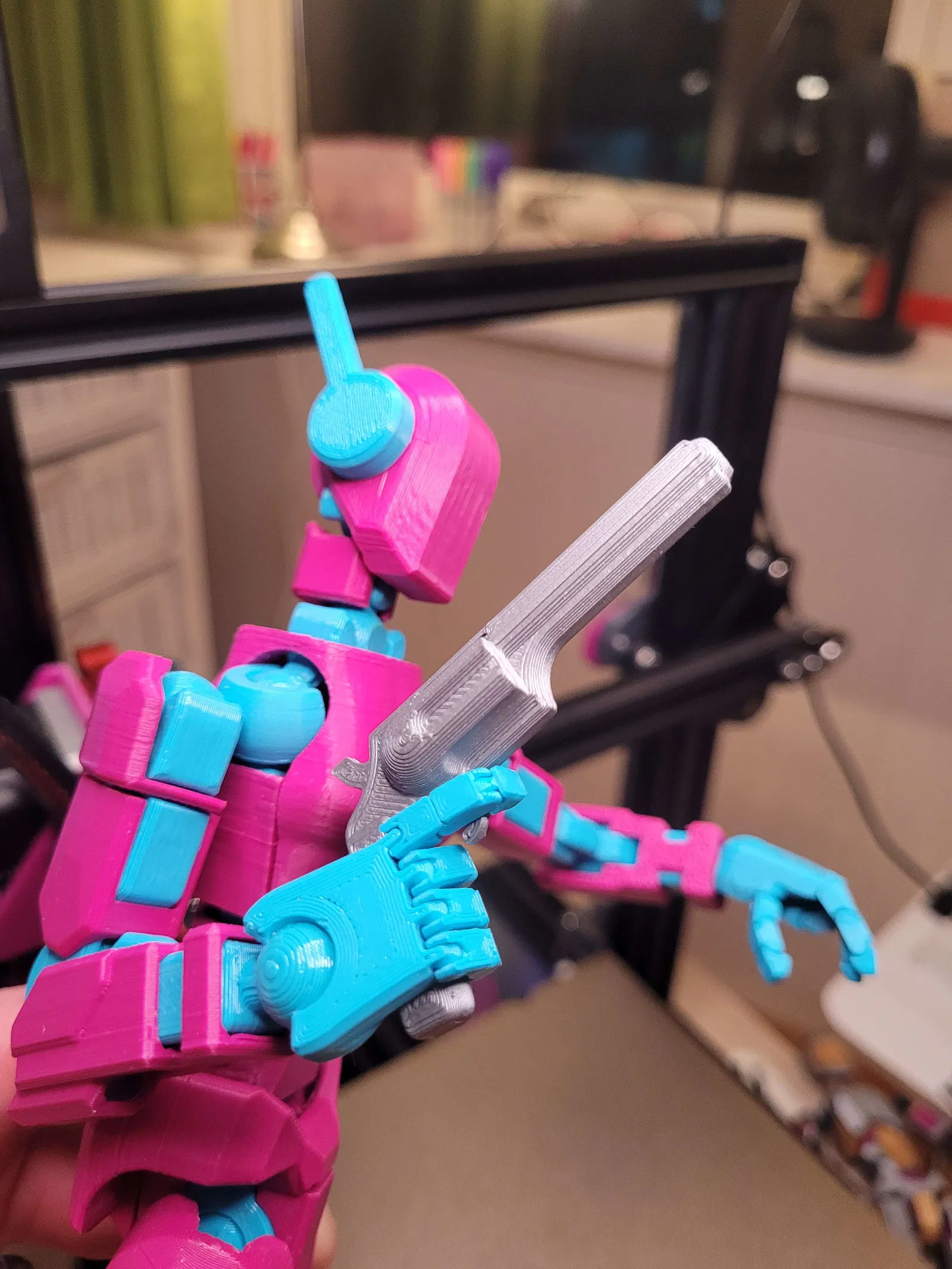
Lúc lắp ráp, làm từ từ thôi: ấn các ngón vào bi (ball) trên lòng bàn tay bằng lực chắc tay, và sẽ dễ hơn nếu chi tiết được làm ấm. Khi đã bấm vô rồi thì nó sẽ đứng yên, khó mà rớt ra. Tay cầm đồ khá ổn và pose rất dễ, giúp con robot nhìn có “tính cách” hơn. Ma sát tốt nên không bị lỏng.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình



Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!