Robot Hand V2.1

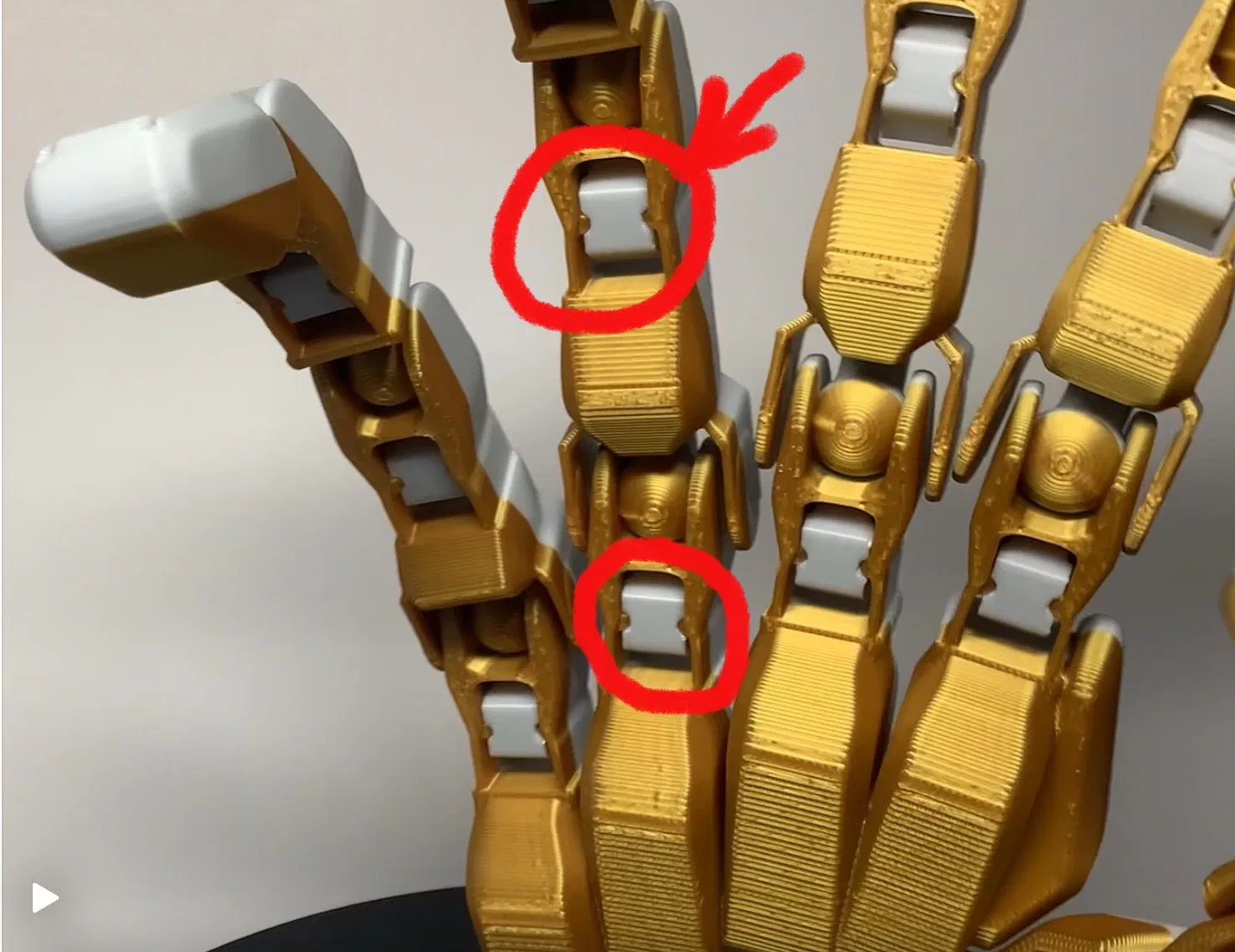
Phiên bản Robot Hand V2.1 cải tiến từ v2.0: thay bánh xe print-in-place bằng lock in rời để dễ in và hợp với mọi filament. In 16 lock, dùng các tool đi kèm để ấn vào khớp và chỉnh 3 mức rãnh lực kẹp.








Mô tả
Đây là một biến thể của mẫu v2.0 của mình, , nhưng các bánh xe print-in-place đã được thay bằng các “lock” in rời. Mục tiêu là in dễ hơn và dùng được với mọi loại filament.
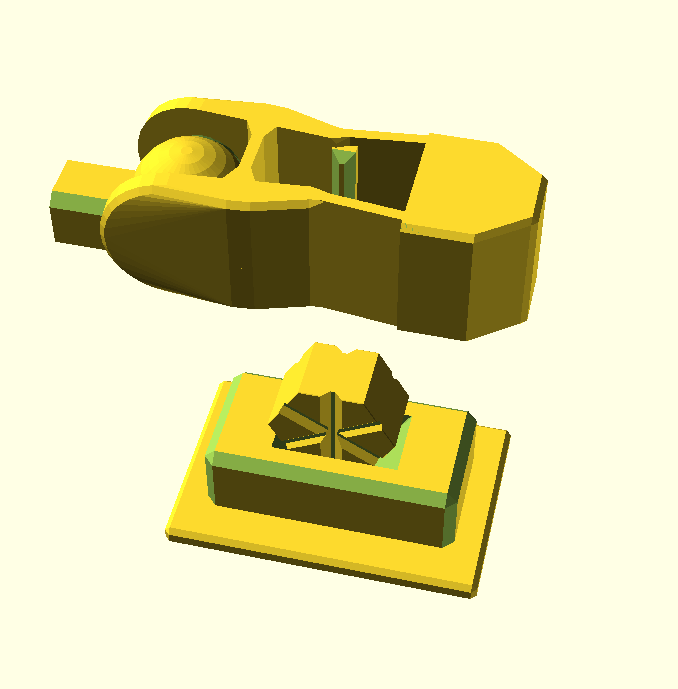
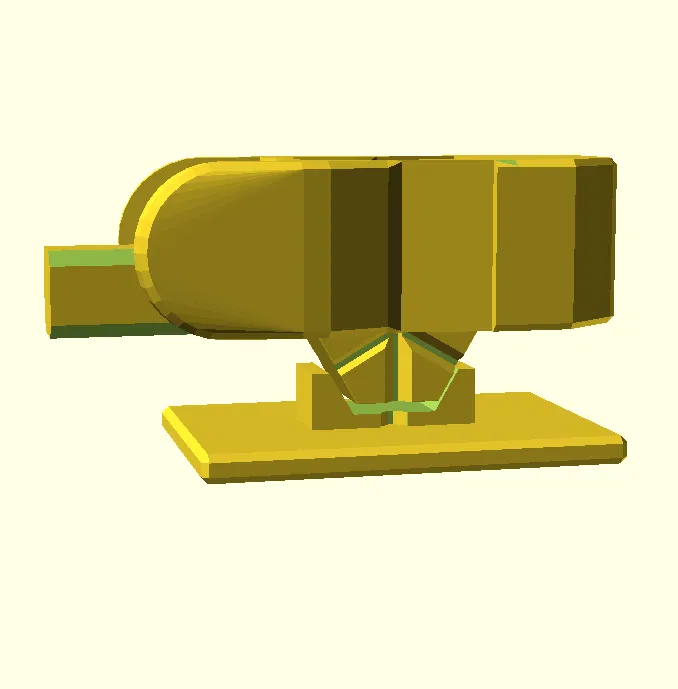
In 16 cái lock rồi ấn chúng vào các khớp ngón tay. Có 3 vị trí: bắt đầu với rãnh sâu, sau đó dùng các rãnh nông hơn nếu bạn cần phục hồi lực kẹp mạnh hơn. Bạn có 2 tool để hỗ trợ ấn lock vào đúng chỗ (xem hình). Bắt đầu ấn vào nửa chừng bằng push-in-01, rồi hoàn tất bằng push-in-02. Bạn phải ấn khá mạnh, nhưng quen tay rồi thì làm rất nhanh. Bạn cũng có thể dùng kềm (plyers) để ép lock vào nếu thích, nhưng có thể làm trầy/ảnh hưởng bề mặt một chút, và lock sẽ không được canh đúng giữa hoàn toàn.
Bạn còn có thêm 2 tool nữa để đẩy lock ra nếu cần đổi sang rãnh khác.
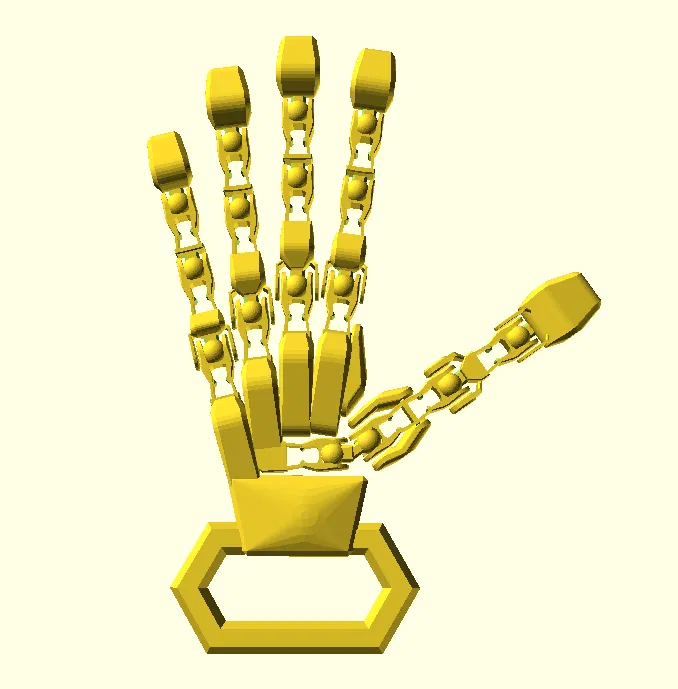
Mình cũng thêm một phiên bản có tay cầm thẳng hàng với bàn tay.
LÀM ƠN TẢI VỀ, THẢ TIM, BÌNH LUẬN, VÀ ĐĂNG SẢN PHẨM BẠN ĐÃ IN. CẢM ƠN.
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — NoDerivativesCC-BY-NC-ND

File mô hình








Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!