Kẹp Gắp Robot Tay Cầm Pistol Grip | Không Cần Support

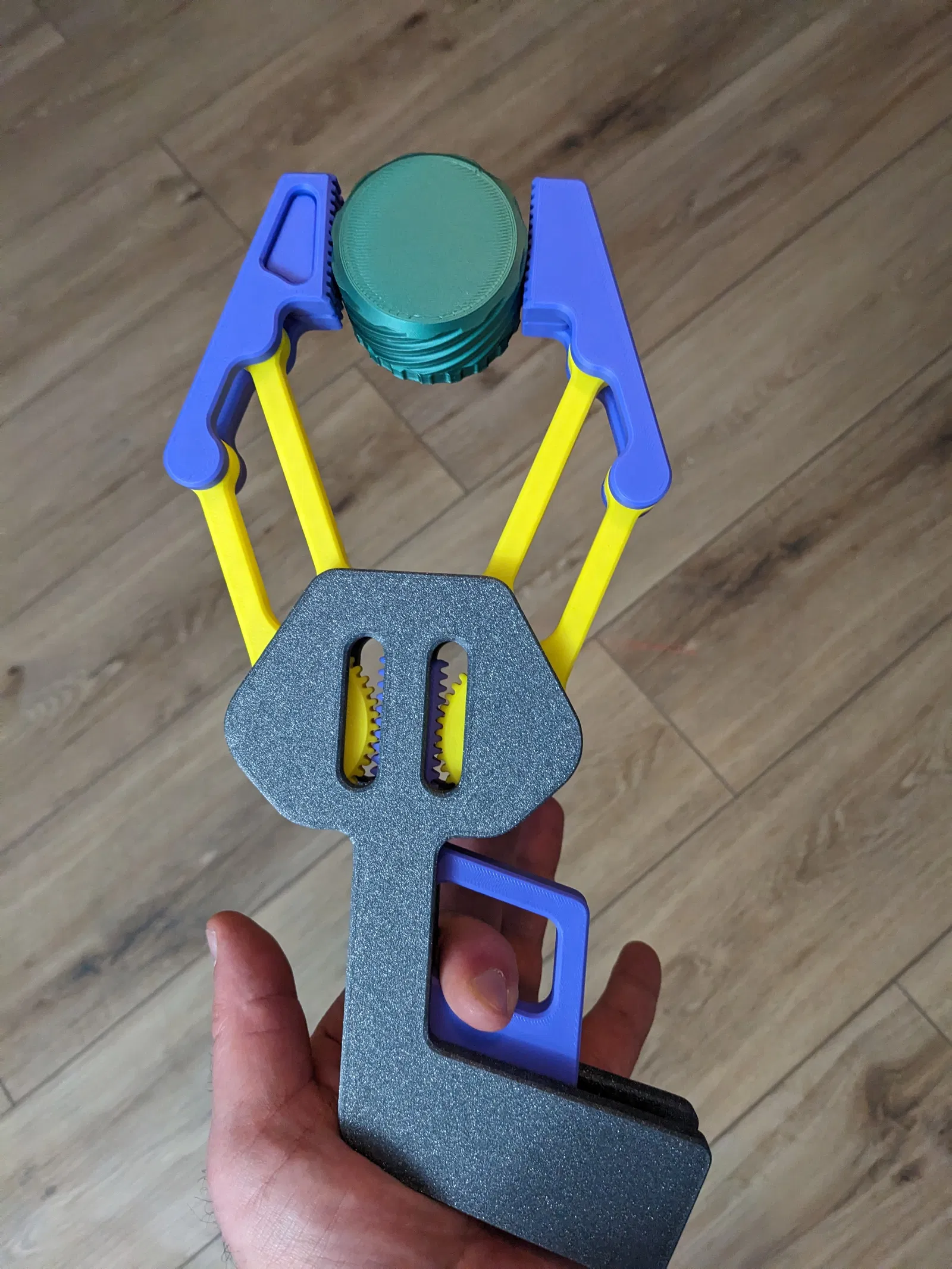
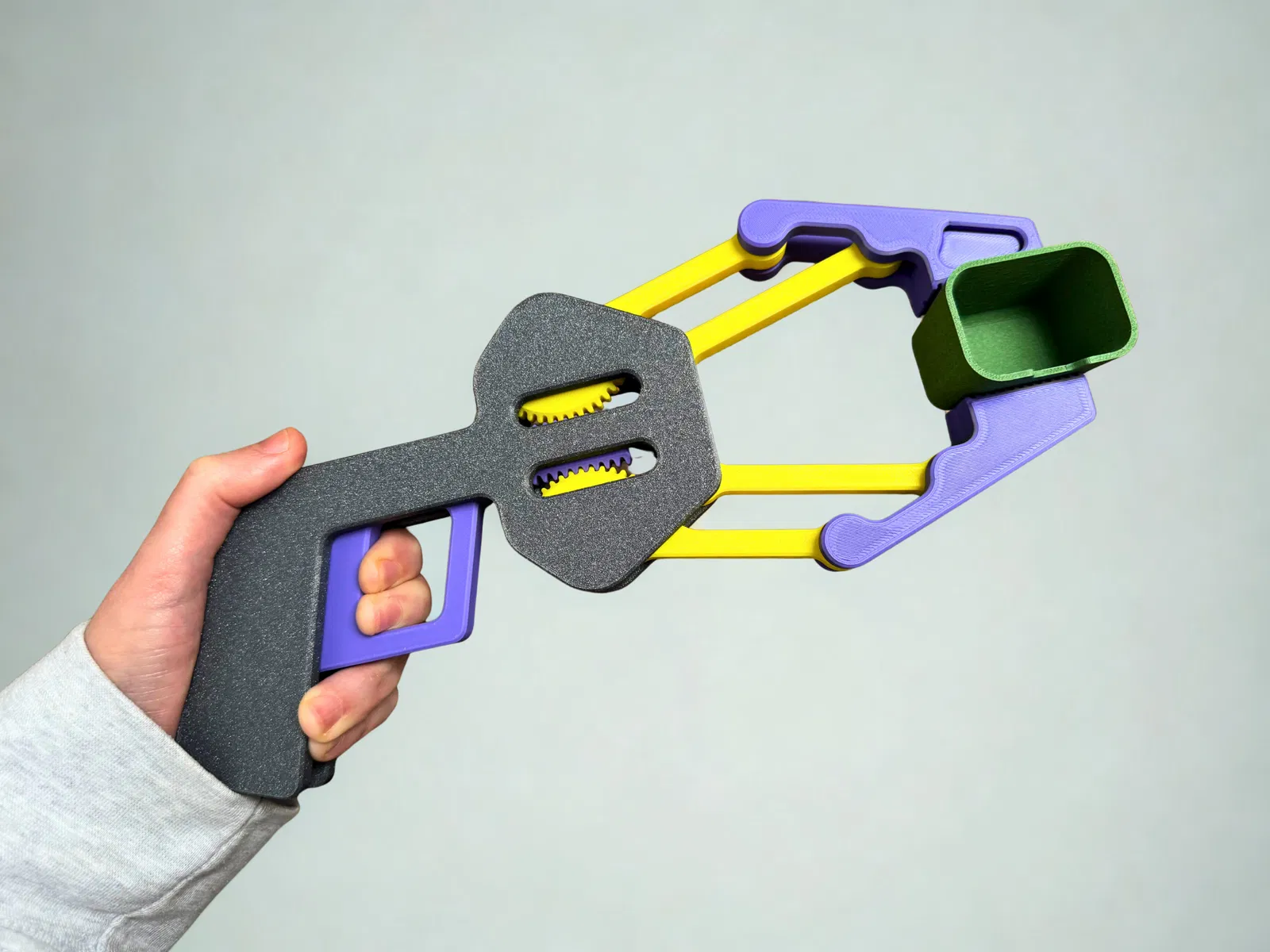
Kẹp gắp robot vận hành bằng cò bóp, dùng cơ cấu 4-bar linkage giúp hai hàm luôn song song. Cò điều khiển hệ double rack & pinion để mở/đóng mượt mà. In FDM không cần support, lắp ráp nhanh gọn.


Mô tả
Kẹp gắp robot vận hành bằng cò. Hai hàm kẹp luôn giữ song song nhờ cơ cấu liên kết 4 khâu (4-bar linkage). Cò bóp điều khiển hệ truyền bánh răng–thanh răng kép (double rack & pinion) để mở/đóng hàm kẹp. In không cần support, lắp ráp đơn giản và nhanh. Tải về là từ nay khỏi phải dùng tay không để gắp đồ nữa!
Why This Design Is Awesome:
Hệ 4-Bar Linkage - Chuyển động hàm kẹp song song “chuẩn bài”
Rack & Pinion Trigger - Điều khiển cơ khí mượt mà
Thiết kế Pistol Grip - Cầm một tay thoải mái
Không cần Supports - Bản in sạch, khỏi mất công dọn
Dễ dùng, trực quan - Đẩy tới để mở, kéo về để đóng
Hướng Dẫn Lắp Ráp Đầy Đủ
Muốn xem đầy đủ chi tiết? Cài đặt in, hướng dẫn lắp từng bước, và giải thích sâu cơ chế hoạt động—xem video YouTube của tụi mình tại đây: https://youtu.be/oGIzqg5BPuQ
Ủng Hộ Tụi Mình Làm Thêm Nhiều Món Hay
Nếu bạn thích thiết kế này, đăng ký kênh YouTube của tụi mình tại https://www.youtube.com/@MacshayCreations. Sự ủng hộ của bạn giúp tụi mình tiếp tục làm và chia sẻ file STL miễn phí cho cộng đồng. Nhiều subscriber hơn = nhiều dự án hơn, nhiều thiết kế hơn, nhiều lượt tải miễn phí hơn.
Về các tuỳ chọn cấp phép STL, xem Patreon tại: https://patreon.com/MacshayCreations
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — NoDerivativesCC-BY-NC-ND

File mô hình








Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!