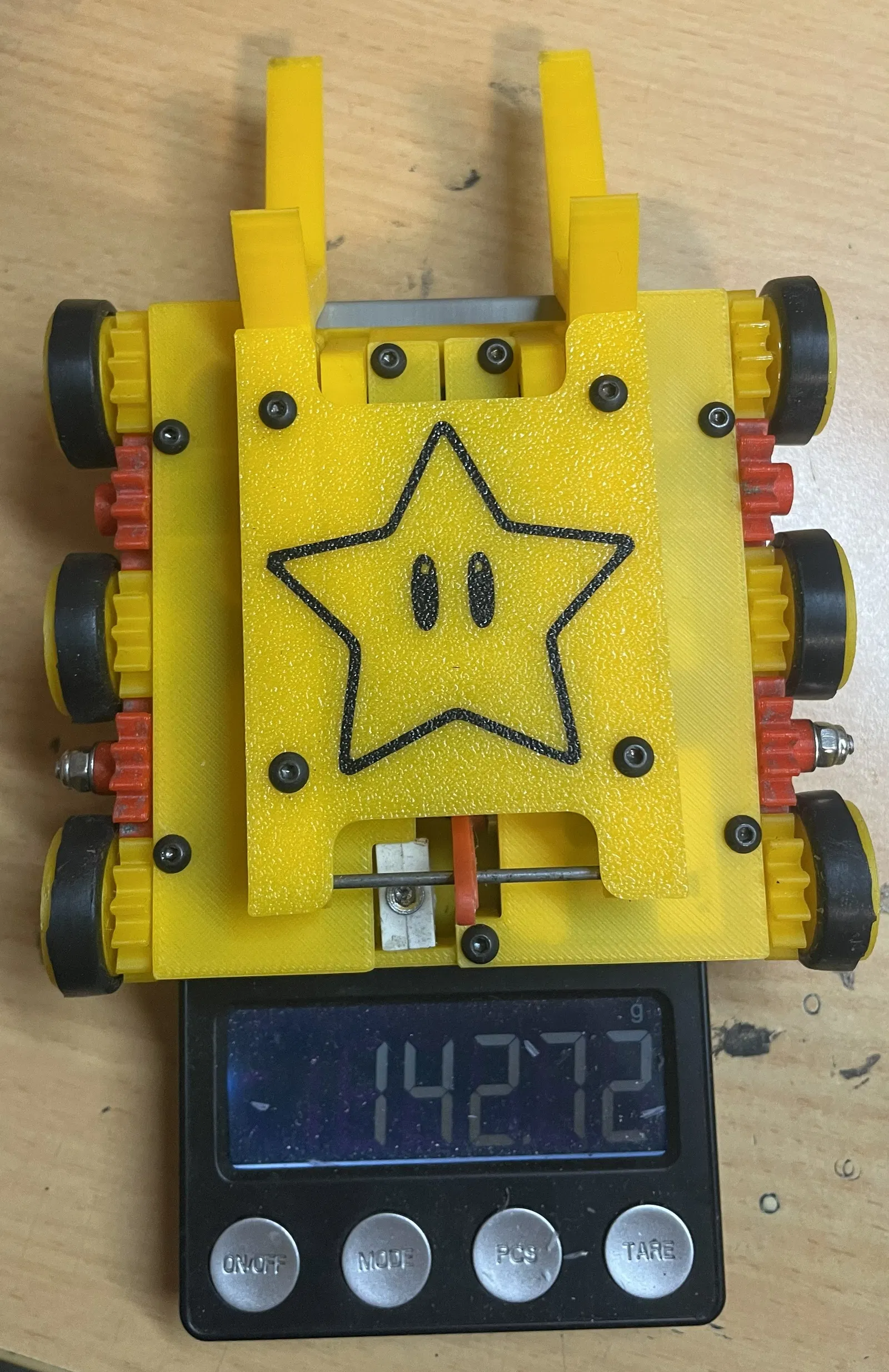
Robot chiến đấu antweight 6 bánh, servo flipper (150g)
File và hướng dẫn build robot chiến đấu antweight 150g: 6 bánh drive, flipper chạy bằng servo. Thiết kế thấp, ổn định, fork dễ chui gầm đối thủ. Có danh sách linh kiện, thông số in và các bước lắp ráp chi tiết.









Mô tả
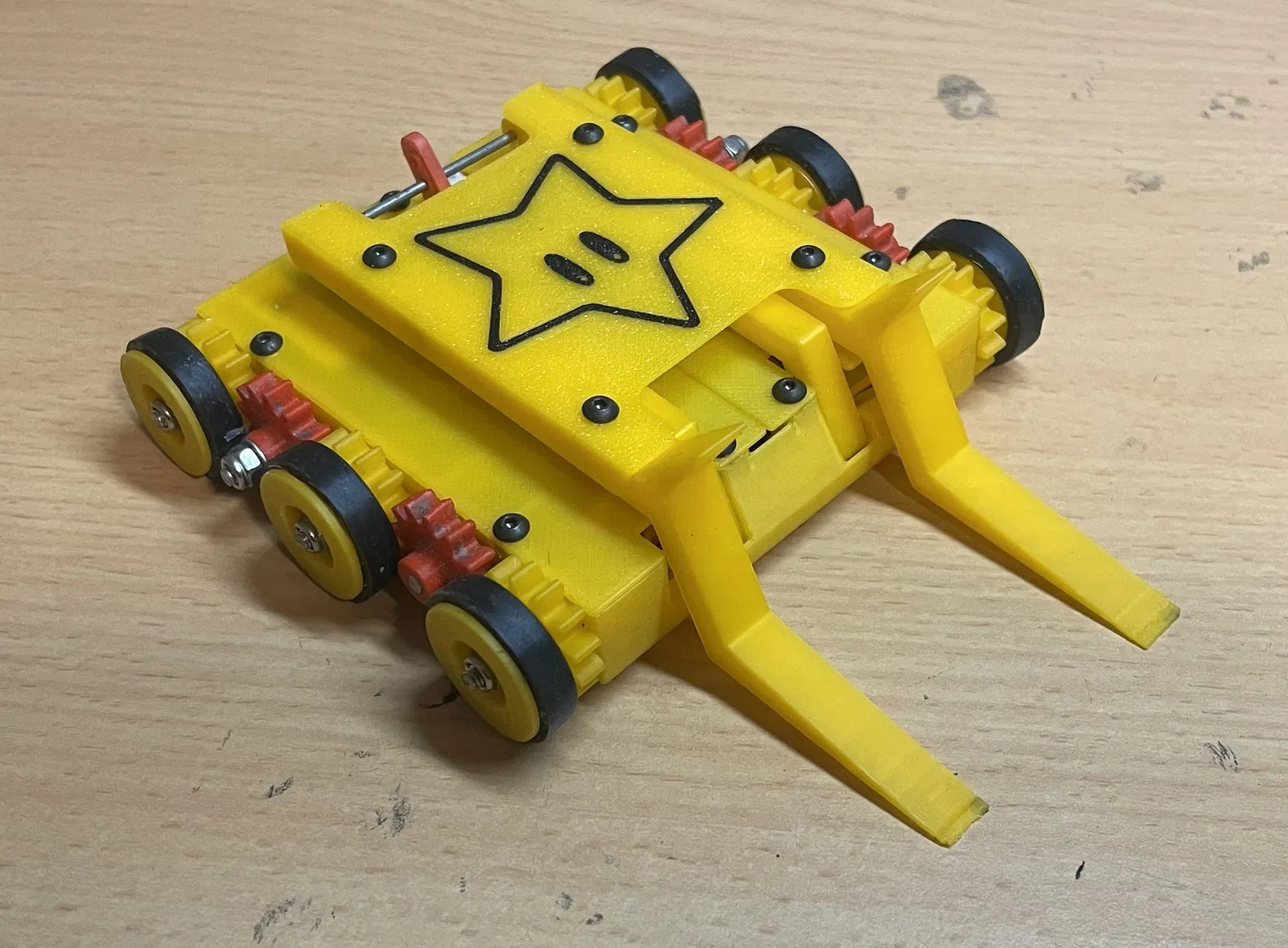
File và hướng dẫn để bạn tự build một antweight combat robot (150 grams). Con này đã đấu hơn 50 trận, lúc nào cũng thể hiện tốt và rất vui, nên mình chia sẻ cho ai muốn thử bước vào combat robotics. Robot này rất thấp và ổn định. Cặp fork chui được dưới hầu như mọi robot khác, và với con servo mạnh thì bạn sẽ hất/nhấc rồi quăng đối thủ đi luôn.
Robot này không hẳn được thiết kế để dễ lắp, nên vui lòng đọc kỹ toàn bộ hướng dẫn. Xin lỗi vì hướng dẫn hơi dài, nhưng mình không muốn bỏ sót thứ gì có thể hữu ích. Cứ thoải mái đặt câu hỏi, mình sẽ cố gắng trả lời.
Mình lấy đa số linh kiện từ AliExpress, các shop combat robotics online, còn pin LiPo thì mua ở tiệm RC hobby gần nhà.
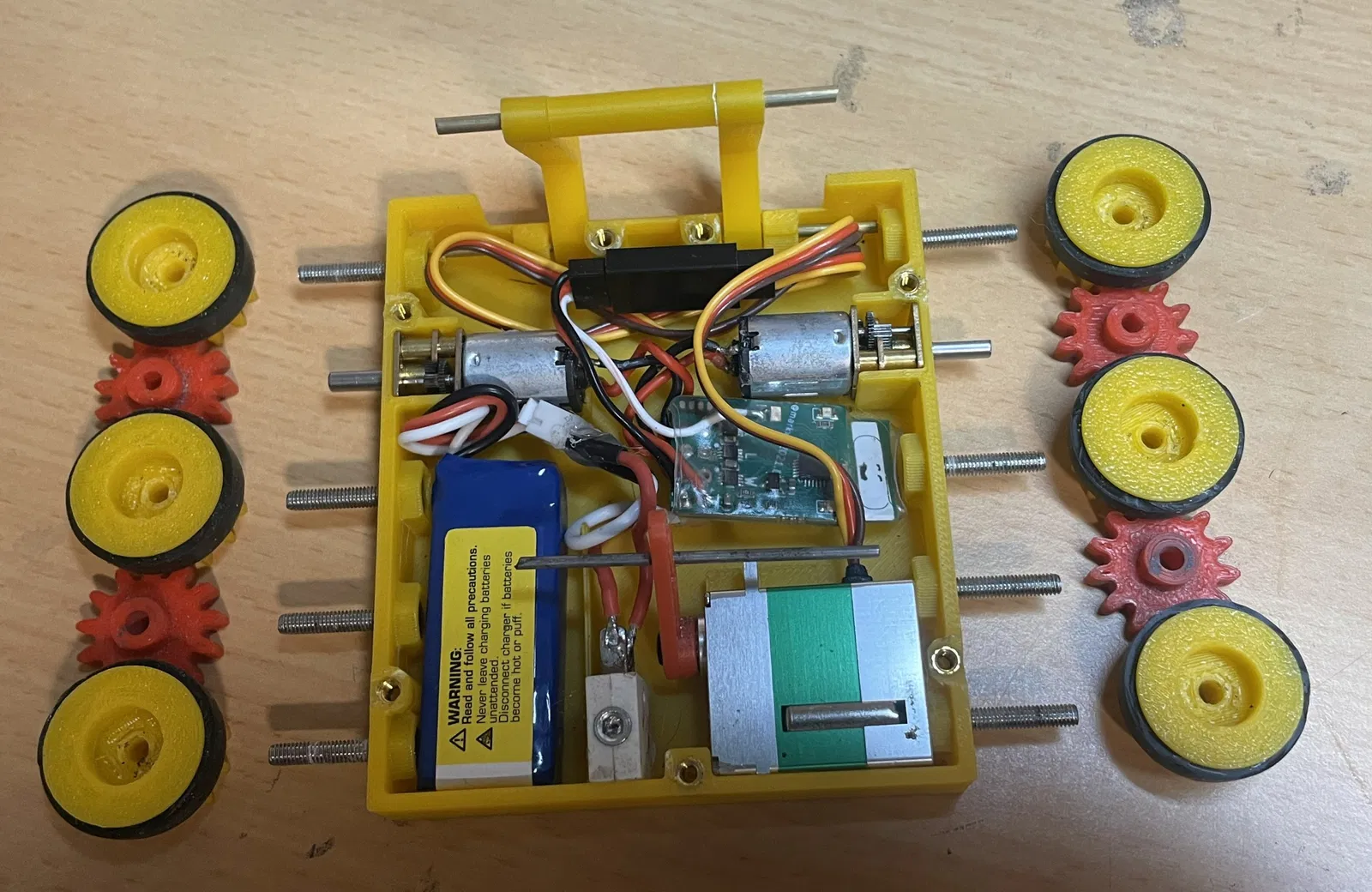
Về electronics mình dùng:
E-flite 200mah 2S battery
fingertech switch
2x n20 gearmotor 6V 500rpm
Malenki nano hoặc llamaforge control board
PTK 9495 Metal Gear Servo (hoặc KST DS215MG thay thế)
đầu connectors cho battery và servo, cùng dây 22 awg multistranded silicone wire.
Mình thật sự khuyên bạn nên dùng một trong các servo gợi ý vì chúng mạnh, bền, nhanh và robot đã được thiết kế vừa khít cho các loại đó. Mình cũng khuyên bám theo n20 gearmotor 6V 500rpm. Motor rpm thấp hơn có thể hơi chậm, còn rpm cao hơn có thể bị đuối khi quay/đổi hướng robot hiệu quả.
Phần hardware khác mình dùng
1.9mm brass rod và/hoặc 1.8 mm spring steel rod
M2.5 (3.5mm OD) knurled heat set inserts
M2.5 6mm button head bolt
M3 x 16 hexagonal bolt
m3 nylon locknuts
m3 washers (.5mm thick)
22mm mini-Z tires (wide) hoặc 24mm x 14mm loại “well known brand of Danish toy tyres”
Bắt đầu bằng việc in toàn bộ parts. Nozzle .4mm, 3 walls, 3 top và bottom layers là đủ cứng. Mình rất khuyến nghị dùng PLA+ vì dai hơn PLA thường nhiều. Mình dùng Polymaker Polymax.
Gắn các M2.5 (3.5mm OD) knurled heat set inserts bằng mỏ hàn và nhíp. Heat set insert rất ngon nhưng hơi khó lắp, nên làm bước này trước sẽ đỡ rắc rối.
Khoan rộng các lỗ nhỏ bằng mũi khoan 2mm để sau này bạn đẩy rod vào dễ hơn.
Ướm thử (dry fit) rồi dán (mình dùng epoxy 5 phút) các m3 16mm hexagonal bolts. Đảm bảo ấn vô hết cỡ và dùng vật thẳng để kiểm tra tất cả có thẳng hàng không.
Lộn ngược tyres và cẩn thận cắt dọc ở giữa để một lốp rộng thành hai lốp hẹp hơn. Tháo supports khỏi wheel hubs. Dán tyres vào wheel hubs và dán wheel hubs vào wheel gears. Keo chỉ cần ít thôi là đủ.
Lắp electronics. Mình cắt bỏ cái tab phía sau của servo và chà nhám cho phẳng để vừa trong robot. Đừng gắn servo horn cho tới khi bạn cấp nguồn lần đầu. Nhớ giới hạn hành trình servo (endpoints) và đảm bảo nó quay đúng chiều (đẩy về phía trước để flip). Đây cũng là lúc kiểm tra gearmotors quay đúng chiều. Nếu dùng malenki nano (hoặc llamaforge control board) mà cảm giác turning hơi ì, mình gợi ý tắt onboard mixing và tự mixing trên transmitter để quay/đổi hướng được full speed.
Gần xong rồi. Bạn sẽ cần 3 đoạn rod. Các lỗ cho rod nên khoan bằng mũi 2mm nếu bạn chưa làm. Một rod nằm phía trước, chạy hết bề ngang thân, để giữ các swivel arms ở đó. Rod thứ hai ngắn hơn (khoảng 47mm) xuyên qua đầu còn lại của swivel arms, có spacer ở giữa. Rod cùng cỡ sẽ xuyên qua lỗ thứ hai của servo horns (giả sử bạn dùng đúng loại servo horn giống mình). Vui lòng xem hình phần internals.
Ấn drive gear vào gearmotors. Thường sẽ khá khít. Chừa một khe nhỏ giữa gear và thân robot để giảm ma sát. Giờ bắt plate trái và phải để giữ electronics đúng vị trí. Để lắp idle gear: dùng một washer, rồi idle gear, rồi washer, sau đó siết bằng m3 nylon locknut. Siết tới vừa chặt bằng tay (fingertight) rồi nới ra nửa vòng. Làm đúng thì mọi thứ sẽ quay trơn. Các bánh xe cũng làm tương tự. Cuối cùng, ấn lifting arms vào rods và cố định bằng top plate.
Lưu ý: combat robot này không được thiết kế để đối đầu đối thủ “phá hoại” (như metal spinners), nhưng cùng mẫu này nếu in bằng TPU thì đã chơi rất ổn, thậm chí còn thắng vài buổi meet hằng tháng ở khu mình.
Chúc bạn chơi vui!
Giấy phép

File mô hình

Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!