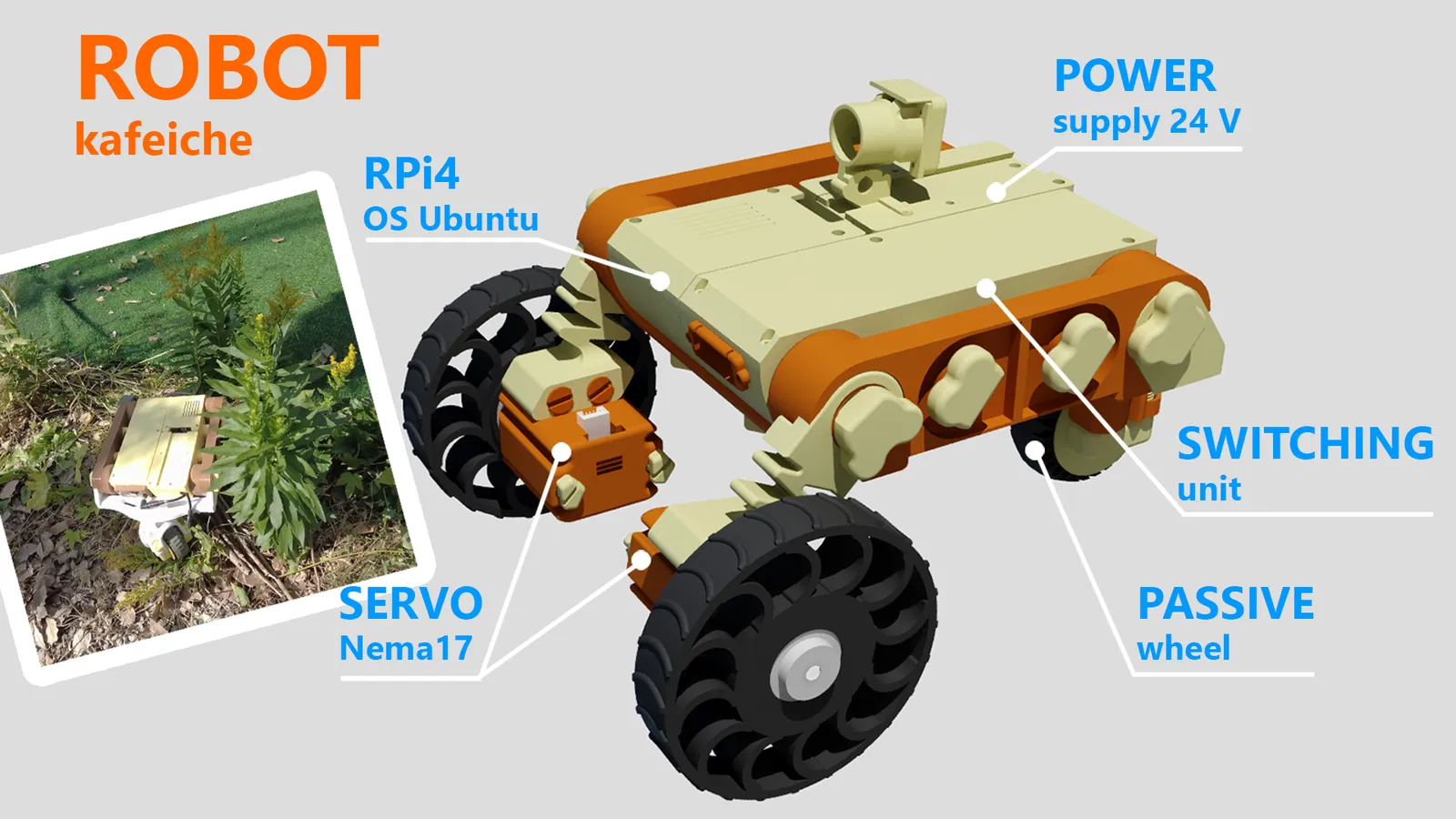
Nền tảng robot thử nghiệm KAFEICHE (Experimental Robot Platform)

Nền tảng robot bánh xe in 3D KAFEICHE chịu tải, dễ lắp ráp và cực kỳ linh hoạt để mod. Hỗ trợ ROS 2 Jazzy cho Raspberry Pi 4B (Ubuntu 24.04), có thể mở rộng điều khiển, tự hành và stream video WebRTC.












Mô tả
Giới thiệu
Mình cần một nền tảng phần cứng dễ dùng để có thể thử nghiệm và học ROS (Robot Operating System). Vì vậy dự án này được tạo ra để giúp hiểu ROS từ con số 0.
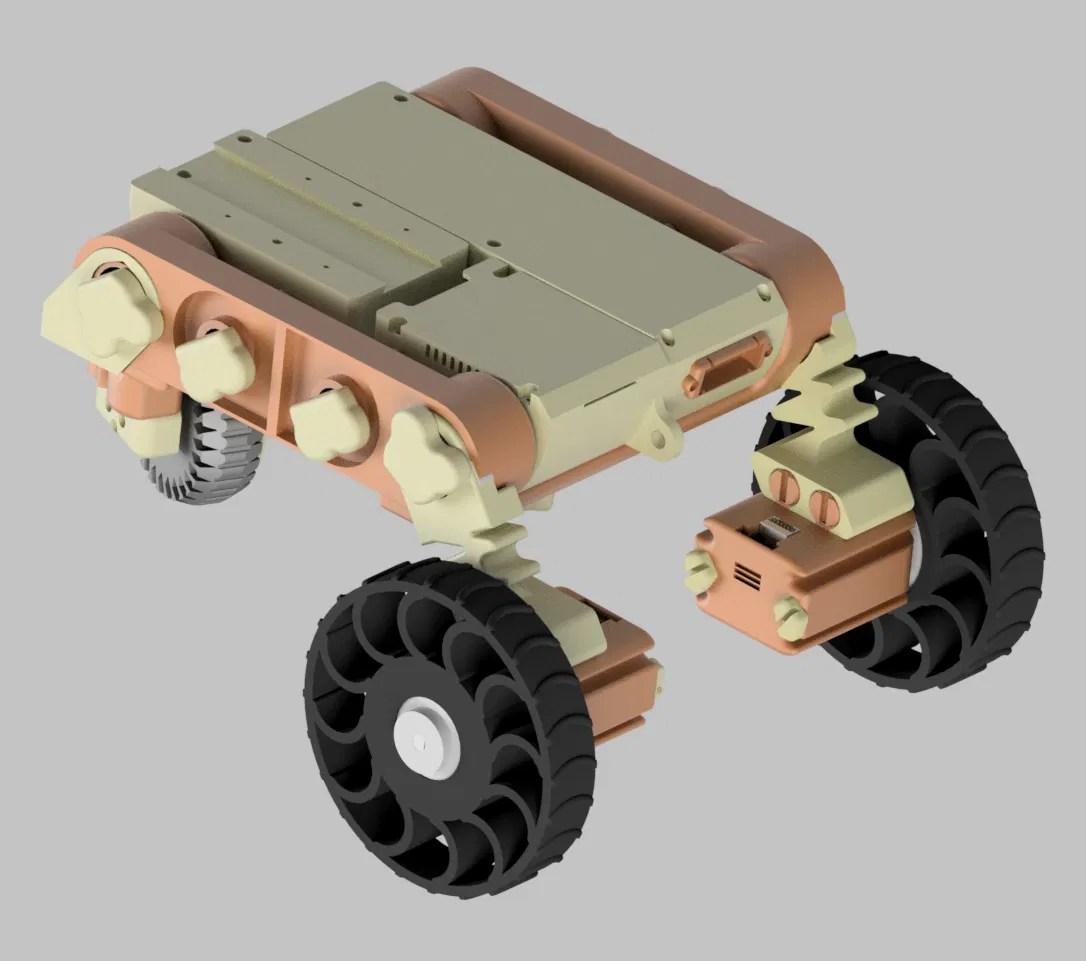
Mục tiêu chính là làm một nền tảng robot bánh xe in 3D có thể chịu tải, dễ lắp ráp, cực kỳ dễ chỉnh sửa/mở rộng, cho phép thay thế linh kiện nhanh và thử nghiệm không giới hạn.
Mức kỹ năng yêu cầu
Dự án có kèm một software stack ROS 2 Jazzy đầy đủ, thiết kế cho Raspberry Pi 4B chạy Ubuntu 24.04 (github: https://github.com/MasSciencer/kafeiche)
Các package ROS 2 được cung cấp sẽ triển khai một hardware interface (dựa trên ros_control) để điều khiển các servomotor của bánh xe.
Mức điều khiển này đủ để sau đó bổ sung các node cấp cao hơn — ví dụ: điều khiển từ xa bằng joystick, tự hành (autonomous navigation), v.v.
Ngoài ra, bạn có thể chạy MediaMTX song song để stream hình ảnh từ camera của robot qua WebRTC lên trình duyệt một cách dễ dàng.
-
Kiến thức nền tảng được khuyến nghị cho ROS 2 control
-
Hiểu biết Ubuntu/Linux mức cơ bản–trung cấp
-
Ít nhất mức trung cấp về ROS 2 (topics, services, actions, launch files, controllers, v.v.)
-
Cần kỹ năng hàn cơ bản để hoàn thiện phần lắp ráp.
-
Nói chung, bạn cần kiến thức cơ bản về giao thức SPI để nối encoder với RP4. Nếu cần, mình sẽ bổ sung sơ đồ kết nối sau.
Hướng tiếp cận thay thế
Bạn cũng có thể triển khai toàn bộ hệ thống điều khiển bằng Arduino hoặc ESP32 — các phần cứng hiện tại đều tương thích đầy đủ với cả hai hướng này.
Khuyến nghị 3D Printing
Tất cả chi tiết đều được tối ưu cho in 3D.
Phần lớn linh kiện được thiết kế để in không cần support và có định hướng rõ ràng kiểu “mặt này hướng lên trên”.
Cần tối thiểu 2 kg PETG và 0.5kg TPU để in.
Thiết lập gợi ý cho các chi tiết chịu lực:
-
Vật liệu: PETG (khuyến nghị dùng, nhưng bạn cũng có thể dùng PLA)
-
Walls: 3 perimeters
-
Infill: ≥ 20%
Chi tiết chịu tải nặng nhất là RESSORA_open — cân nhắc tăng infill lên 40–50% hoặc thêm perimeters cho phần này.
Bánh xe
In bằng filament dẻo — TPU (khuyến nghị 85A–95A)
Ốc vít/đồ siết (Fasteners)
Phần lớn các mối ghép dùng ốc vít in 3D cỡ lớn, nhưng cũng có một số vị trí dùng ốc kim loại M3 và heat-set threaded inserts.
Lắp ráp
-
Hướng dẫn chi tiết có sẵn dưới dạng PDF trong các file đính kèm;
-
Danh sách toàn bộ linh kiện cần in có sẵn dạng PDF và Google sheets 1
-
Danh sách linh kiện cần mua (BoM) cũng có sẵn dạng PDF và Google sheet 2

Kế hoạch tổng quan

Bánh thụ động

Bánh-motor

Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình



































Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!