Bàn tay robot nhỏ điều khiển bằng servo 9g

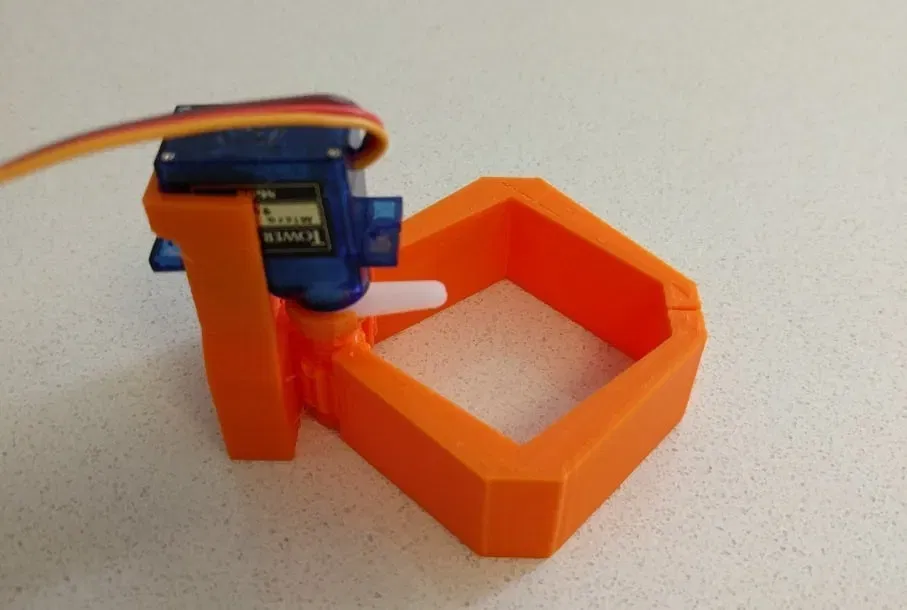
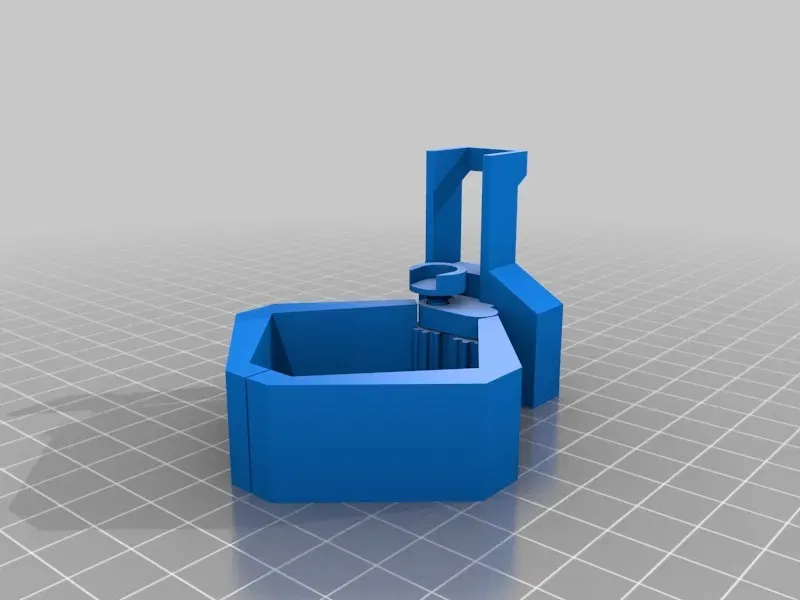
Một bàn tay robot nhỏ được điều khiển bởi một servo 9G Cheep, được in hoàn toàn thành một mảnh. Điều này được thiết kế cho 0,4mm

Mô tả
Một bàn tay robot nhỏ được điều khiển bởi một servo 9g rẻ tiền, in hoàn toàn lắp ráp trong một mảnh. Điều này được thiết kế cho vòi phun 0. 4mm và chiều cao lớp 0. 2mm, các kích thước rất chặt chẽ nên nếu bạn có bất kỳ sự dư thừa nào thì nó sẽ không in đúng cách. Mô hình này cần hỗ trợ để các bánh răng không bị gắn chặt vào các bề mặt bên dưới và bên trên chúng - nhưng các hỗ trợ phải nhỏ và dễ gãy, cài đặt hỗ trợ ở mọi nơi của eSlicer hoạt động tốt, hỗ trợ mặc định của Slic3r thì quá lớn và có thể sẽ không hoạt động. Khi bạn lấy bàn tay ra khỏi bề mặt in, các cạnh "ngón tay" nên trông như thể chúng đang chạm vào nhau nhưng không nên bị gắn chặt. Bạn cần phải loại bỏ các hỗ trợ giữ khớp nối động cơ trước khi làm bất cứ điều gì khác, nếu không, trục kết nối nó với các bánh răng có thể bị gãy. Sau khi loại bỏ hỗ trợ, chỉ cần kéo "ngón tay" ra xa nhau, bạn cần áp dụng một lực để phá vỡ các hỗ trợ nhưng không nên quá khó khăn. Mở và đóng bàn tay vài lần để làm mòn các hỗ trợ và làm cho động cơ dễ dàng hơn, nếu động cơ không thể đẩy bàn tay thì nó không được căn chỉnh chính xác. Mô hình này được thiết kế bằng SketchUp, các tệp STL đã được sửa bằng Microsoft 3D Builder, sau đó nó đã được cắt bằng eSlicer và in trên Robo3D R1+ của tôi. Video về nó hoạt động tại
Danh mục: Robotics
Giấy phép

File mô hình

Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!