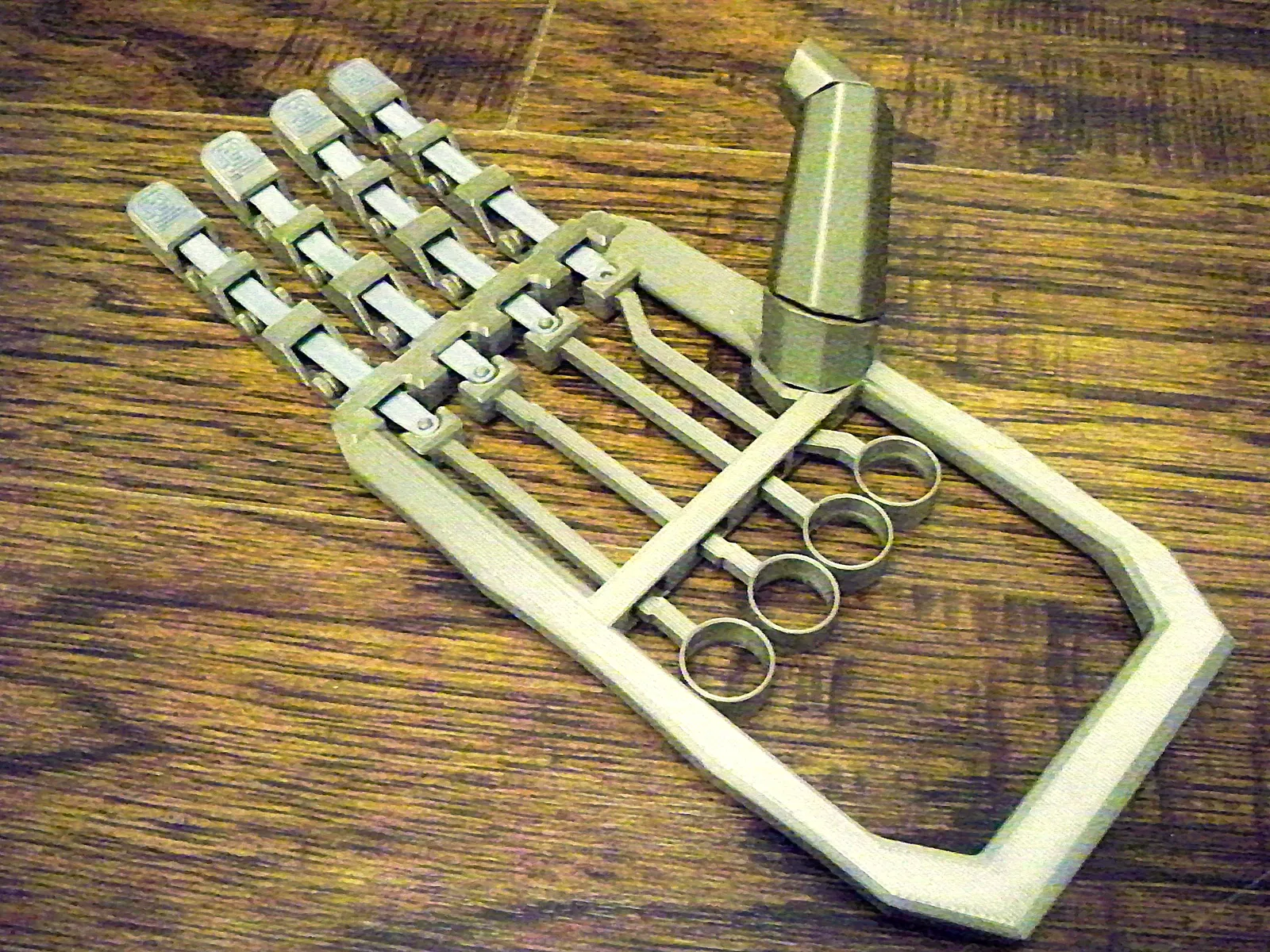
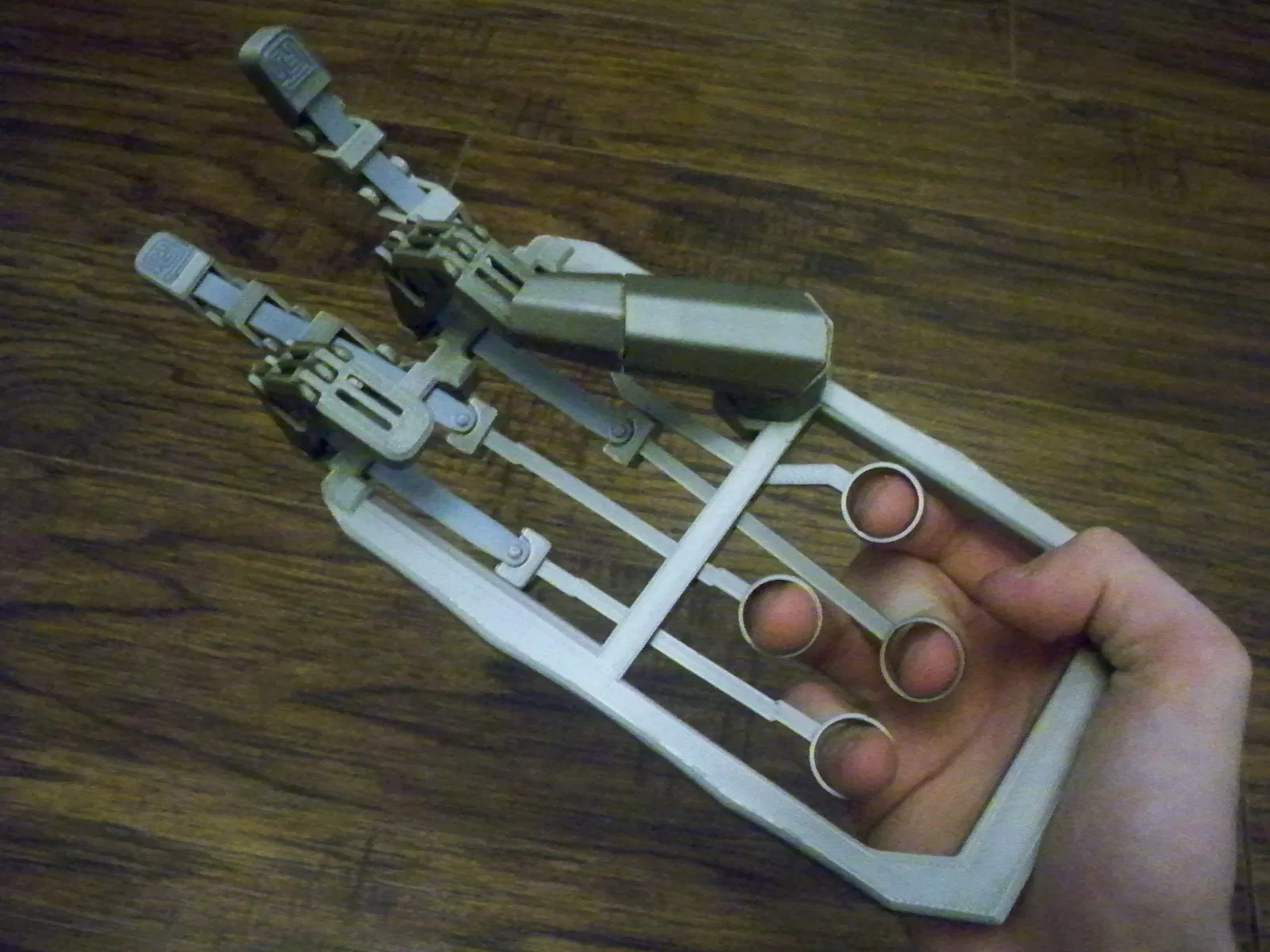
Bàn tay robot với các ngón chuyển động độc lập

Mẫu bàn tay robot cho phép các ngón chuyển động độc lập. Nên in chậm (tối đa 50mm/s) và dùng supports cho các thanh nối ring với tendon. Nếu khớp đế ngón cái bị cứng, dùng kìm xoay tới lui vài lần.
208
Lượt Xem
8
Lượt Thích
73
Lượt Tải
Cập Nhật Jan 06, 2026








Mô tả
Mình rất thích thiết kế bàn tay robot này, nhưng rồi lại nghĩ: sao không làm hẳn bốn ngón thay vì chỉ một ngón? Nếu bạn cũng từng nghĩ vậy thì đây nè.
Mình khuyên bạn nên in khá chậm (tối đa 50mm/s), và có lẽ nên bật supports cho các thanh nối những vòng (rings) với các gân kéo (tendons).
Theo kinh nghiệm của mình, khớp đế của ngón cái đôi khi hơi cứng. Để xử lý, bạn có thể dùng kìm (pliers) xoay tới xoay lui vài lần cho nó trơn hơn.
Giấy phép

File mô hình
Đang tải files, vui lòng chờ...


Vui lòng đăng nhập để bình luận.
Vui lòng đăng nhập để khoe bản in của bạn.
Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!