Kẹp Servo In 3D (3D Printed Servo Gripper)

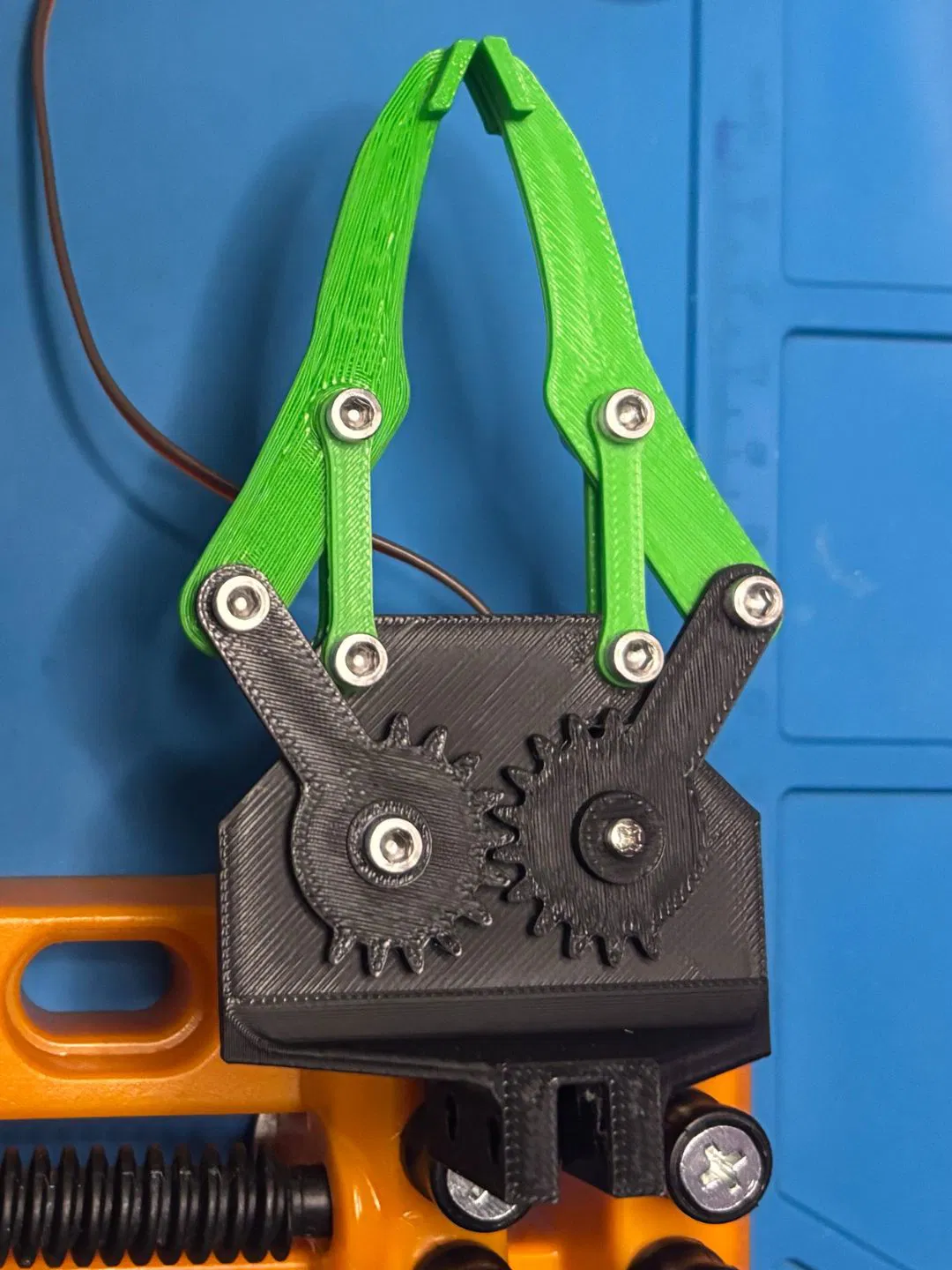
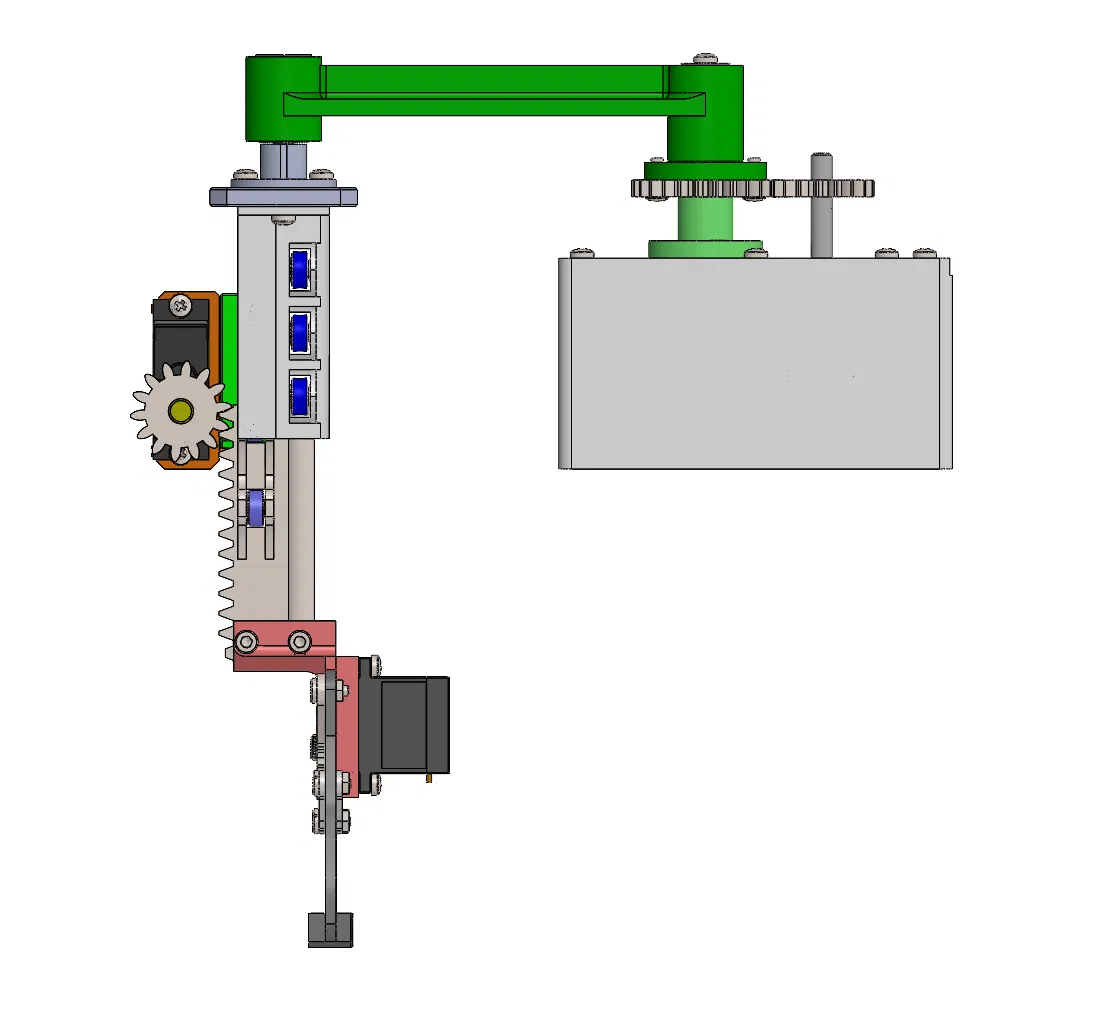
Cơ cấu kẹp servo in 3D chuyển chuyển động quay của servo motor thành chuyển động kẹp nhờ bánh răng và hệ bốn khâu. Phù hợp robotics hobby, pick & place và học tập; khuyến nghị giới hạn góc 120°–35° để tránh cạ chạm.




















Mô tả
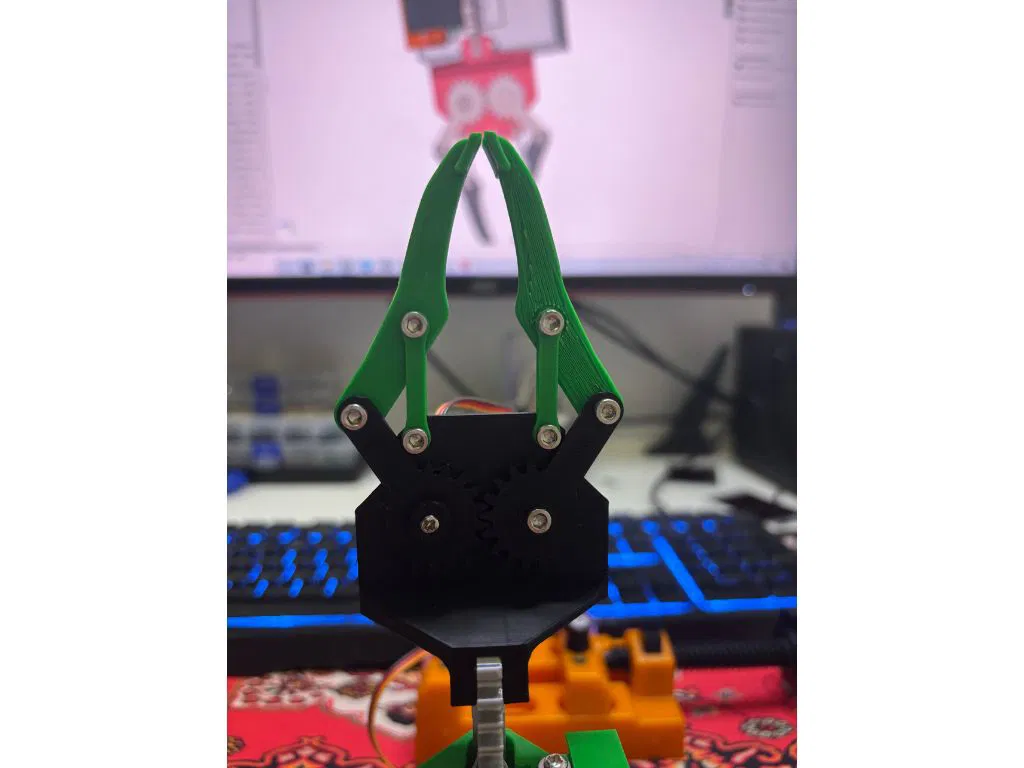
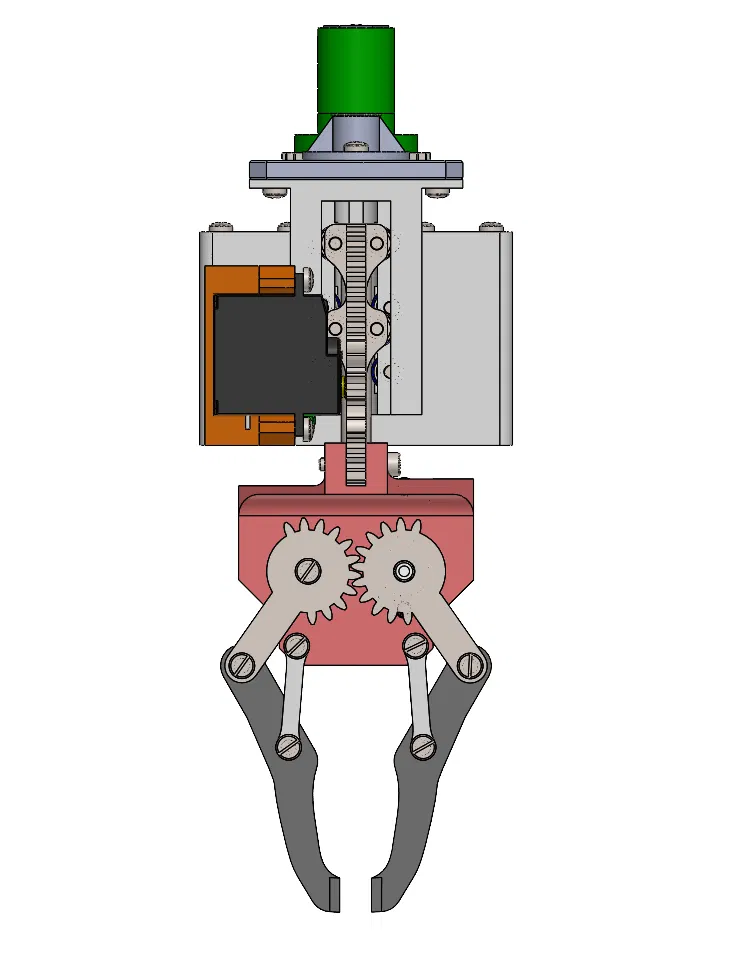
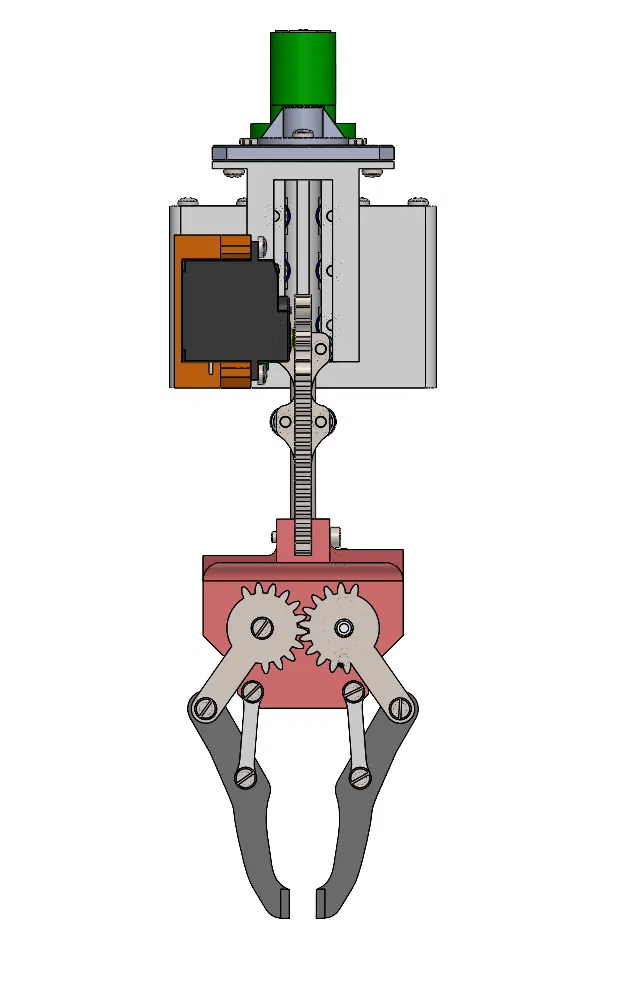
Cơ cấu này chuyển chuyển động quay của servo motor thành chuyển động kẹp bằng hệ bốn khâu (four-bar linkage) dẫn động bằng bánh răng. Thiết kế cho robotics hobby, tác vụ pick & place và sinh viên.
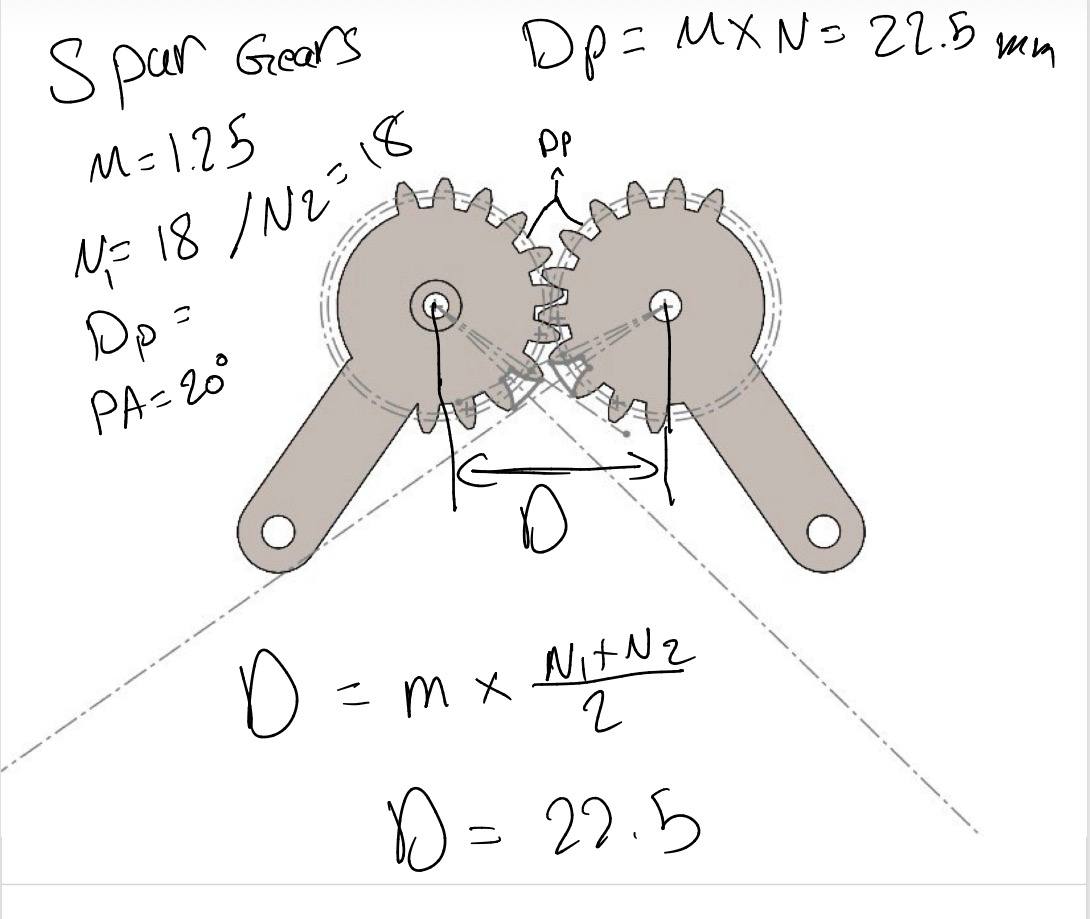
1. Thông số bánh răng
Tiêu chuẩn: Spur Gear
Góc áp lực (Pressure Angle): 20°
Module: 1.25M
Số răng (Teeth): 18T
Đường kính vòng chia (Pitch Diameter): 22.5 mm
2. Tính toán lý thuyết
A. Khoảng cách ngang giữa hai tâm bánh răng
B. Phân tích vị trí (Four-Bar Linkage)
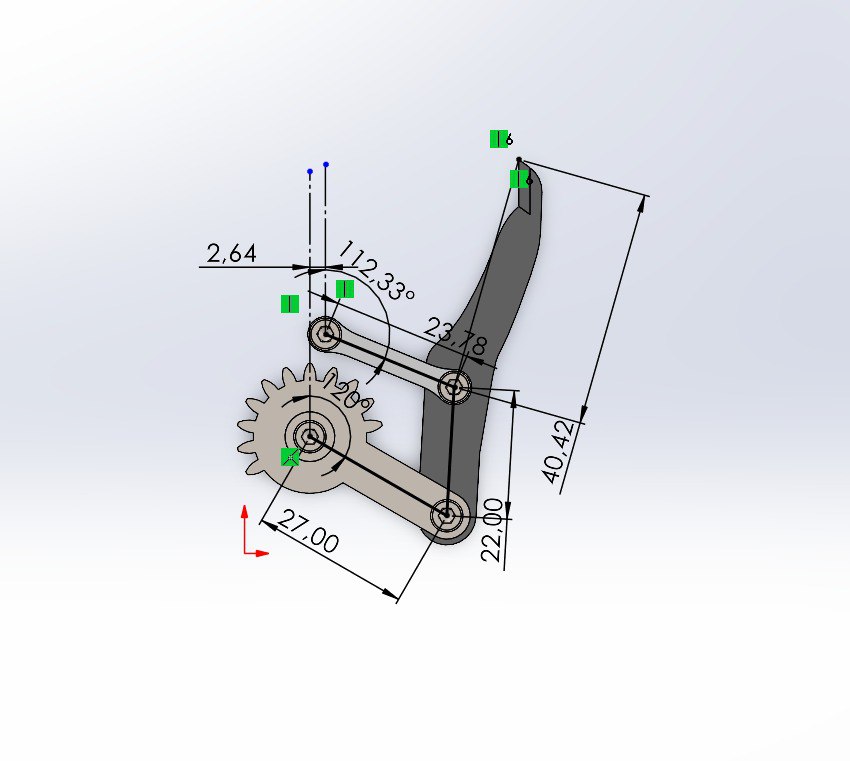
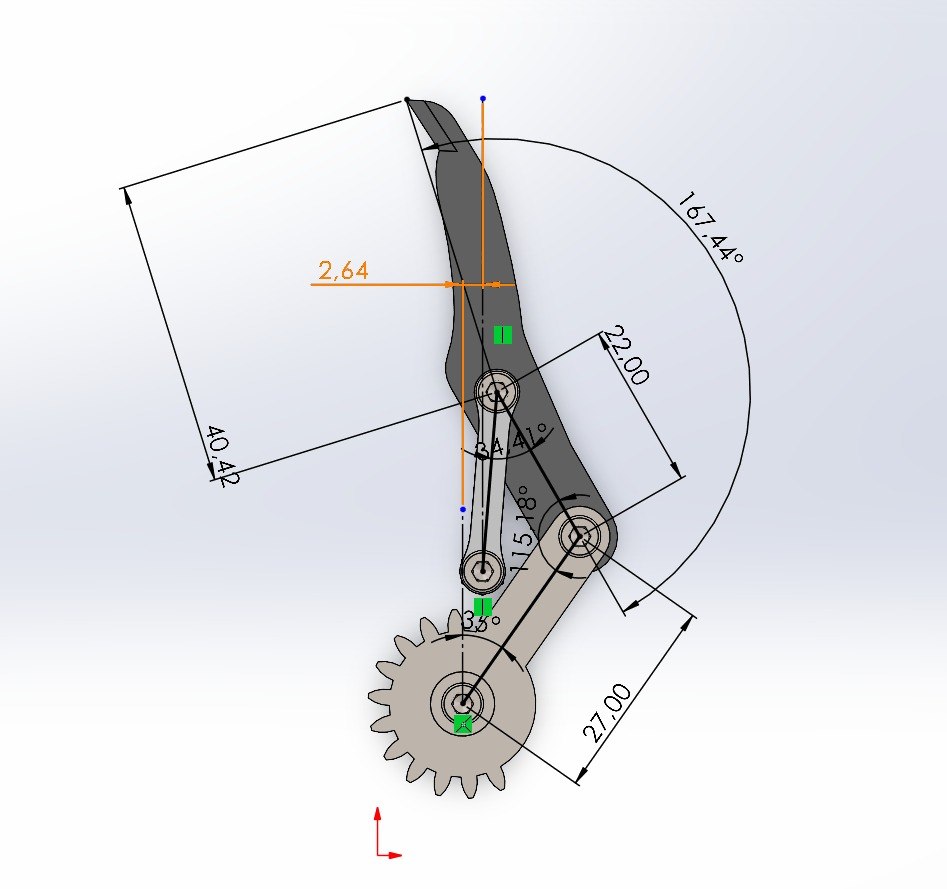
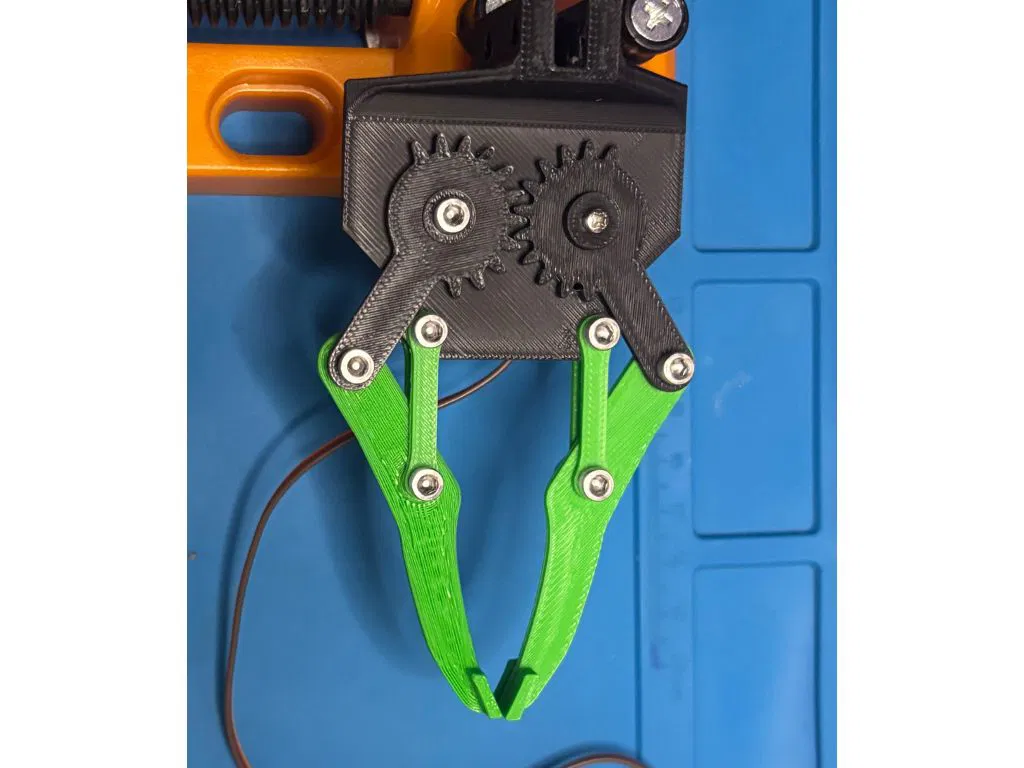
C. Khuyến nghị: Giới hạn góc quay servo trong khoảng 120° đến 35°.
Lý do: Tránh va chạm cơ khí (mechanical interference) giữa các chi tiết
-
120°: Vị trí mở hết.
-
35°: Vị trí đóng hết (kẹp).
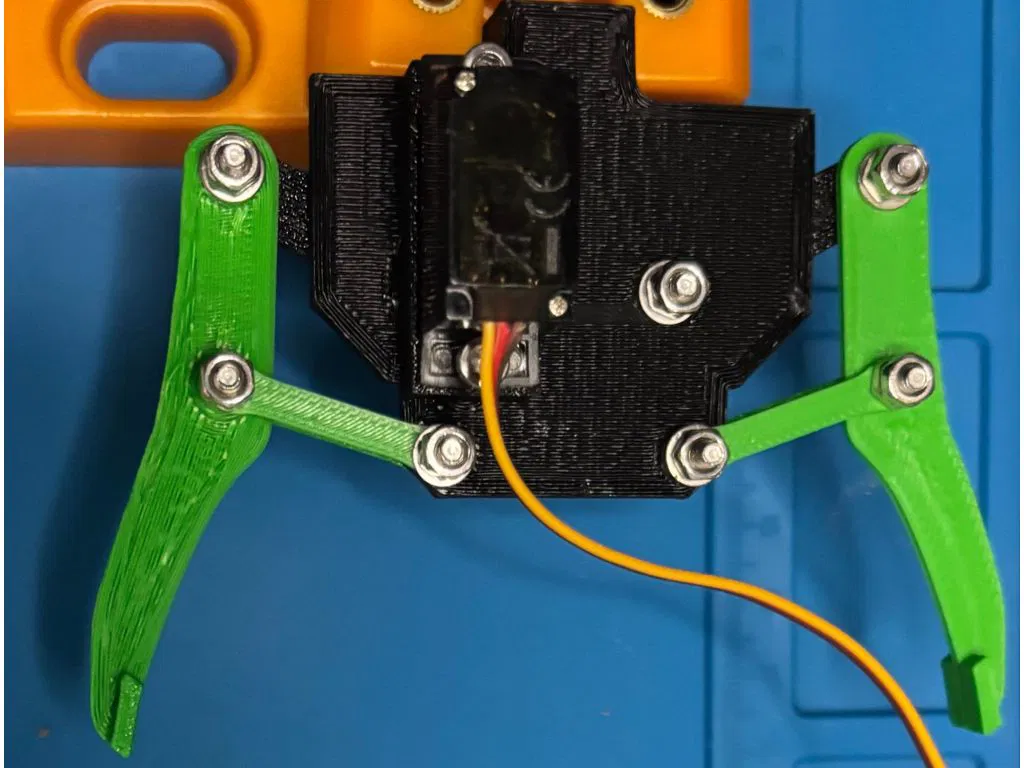
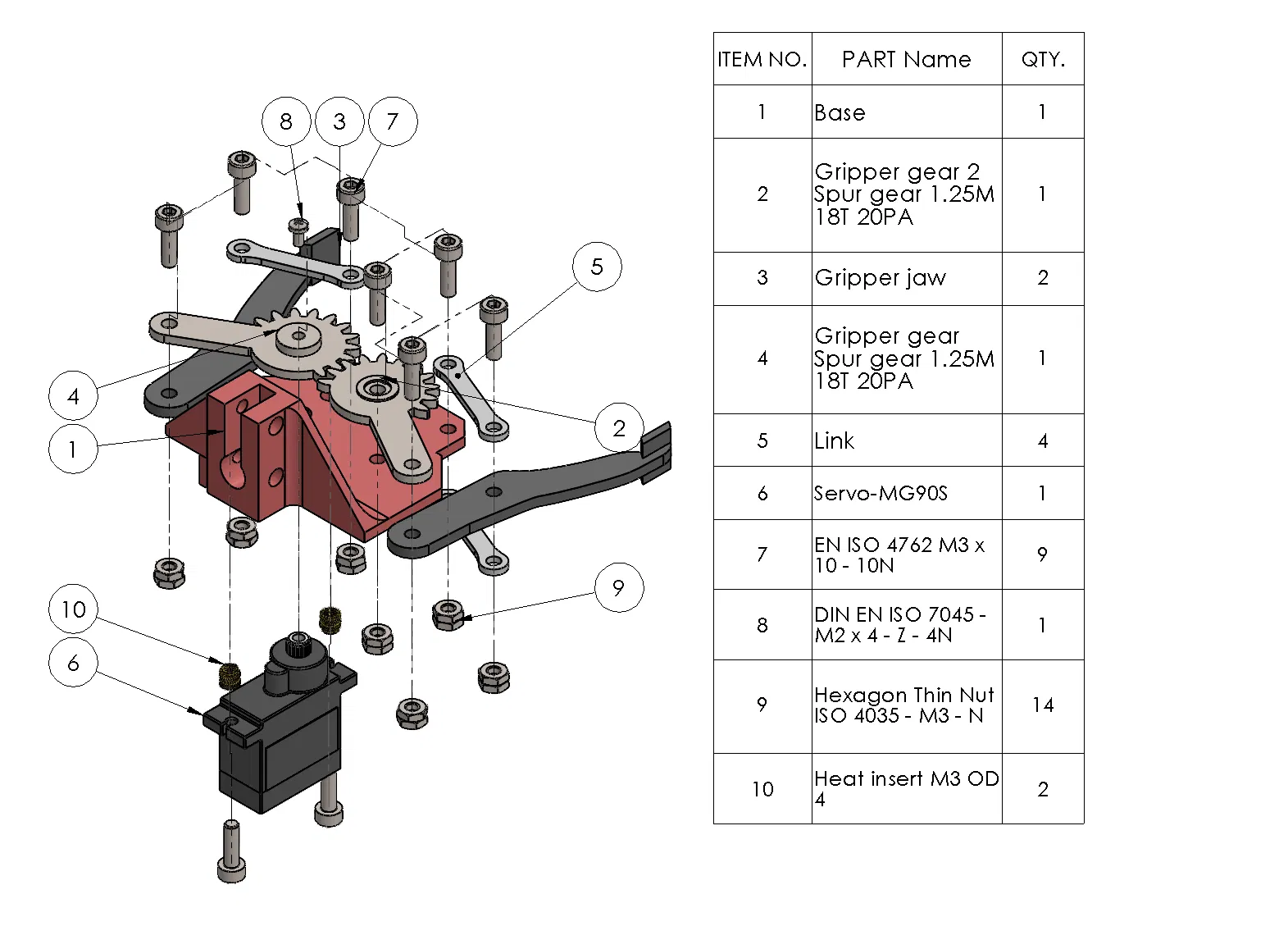
3. Phần cứng (Hardware)
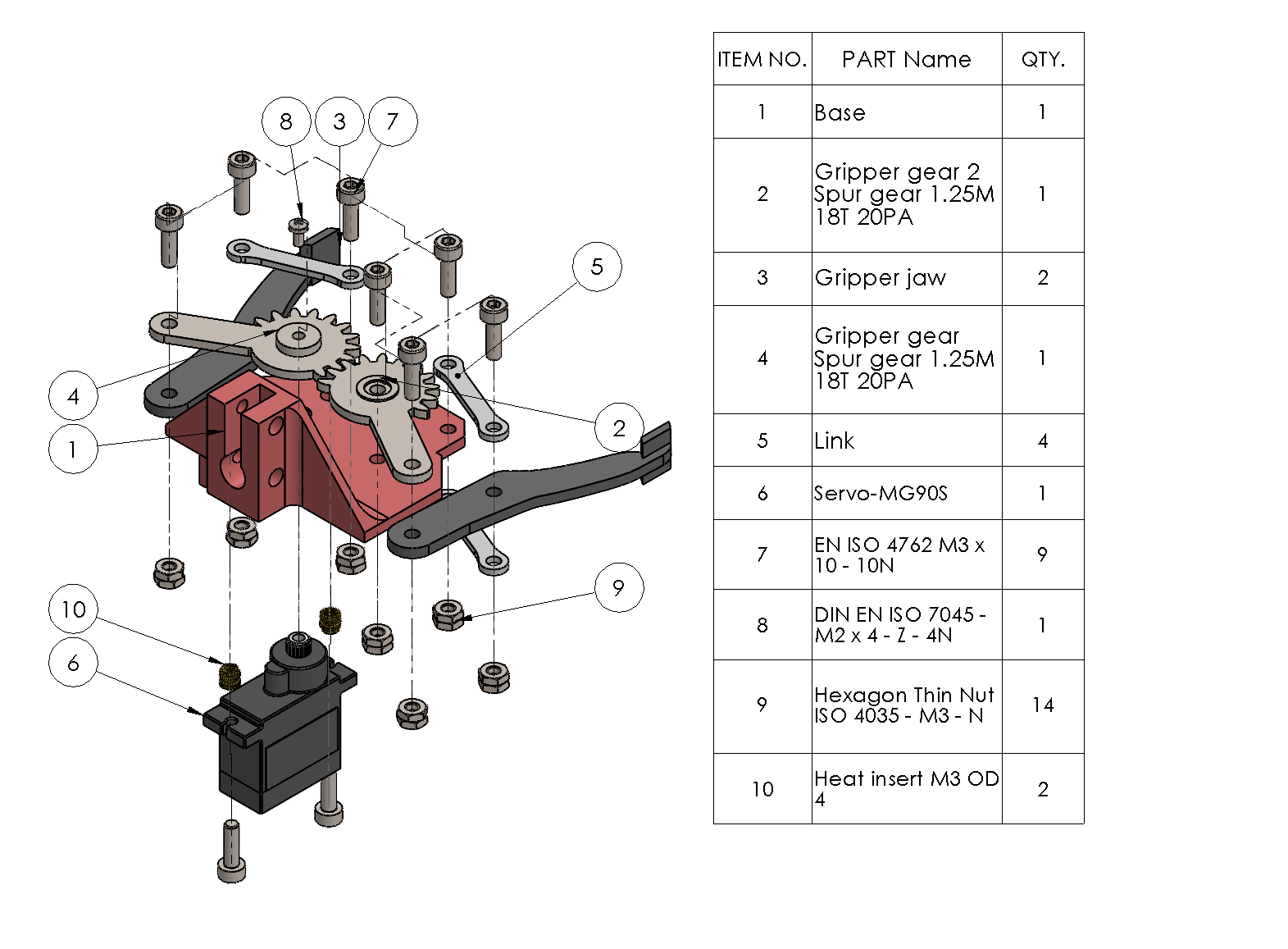
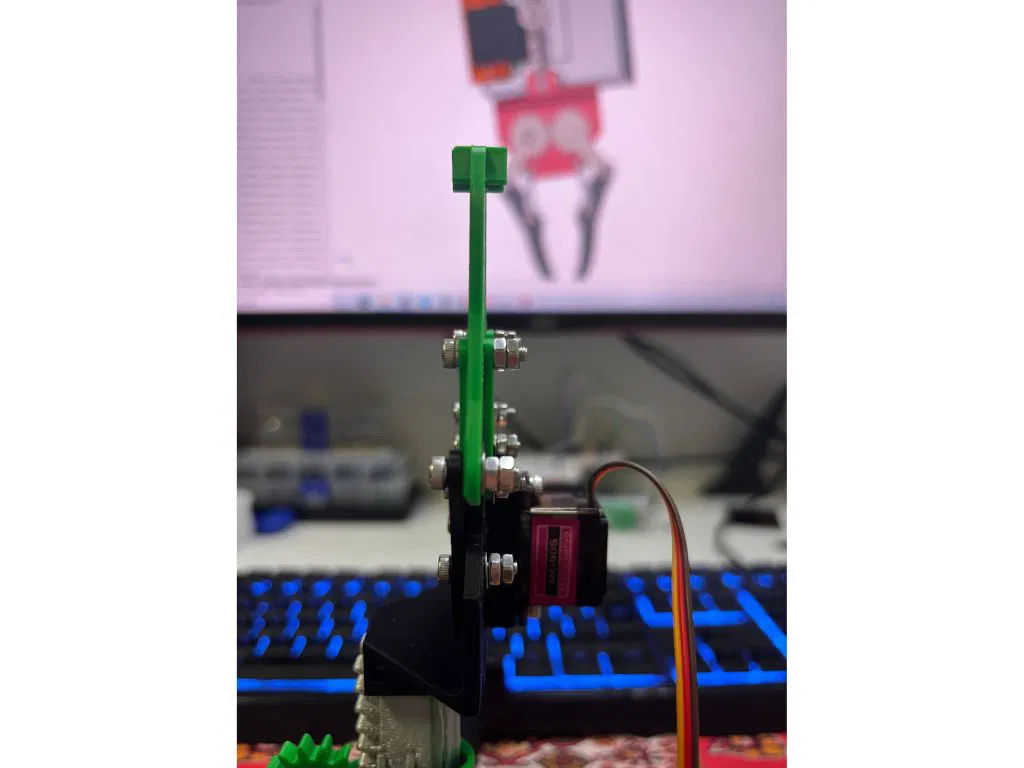
Cách lắp khớp (Joint Assembly Method): Để đơn giản, các khớp dùng cấu hình Vít + 2 ê-cu (Double-Nut/Jam Nut). Hai ê-cu siết hãm nhau để giữ độ hở cho chuyển động.
Phương án khác: Dùng chốt (Pins) hoặc Shoulder Screws.
4. Video lắp ráp & thiết kế
Giấy phép
Tác phẩm này được cấp phép theo
Creative Commons — Attribution — Noncommercial — Share AlikeCC-BY-NC-SA

File mô hình





Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!