Đồ chơi rượt đuổi chạy pulley điều khiển từ xa cho thú cưng

Đồ chơi rượt đuổi cho thú cưng dùng Arduino, motor và hệ pulley để kéo ribbon/đồ chơi chạy qua nhiều điểm. Điều khiển bằng IR remote để đổi tốc độ, đảo chiều, dễ tùy chỉnh bố trí giúp mèo/chó vận động và bớt chán.














Mô tả
Mô tả
Mình làm dự án này để cho bé mèo con của mình có một cách chơi vừa vui, vừa kích thích, vừa tương tác—nhất là những lúc mình bận hoặc không ở nhà. Mèo vốn có bản năng săn mồi, rất “hợp” với các thứ chuyển động và khó đoán. Đồ chơi truyền thống thường nhanh chán, nên mình muốn thiết kế một hệ mô phỏng bản năng rượt đuổi bằng cách cho đồ chơi di chuyển theo một đường đi có kiểm soát nhờ motor và hệ pulley.
Khác với đồ chơi đứng yên hoặc các đồ chơi tự động đơn giản, hệ này cho phép đồ chơi chạy qua nhiều điểm—ví dụ A, B và C—giữ cho mèo luôn tò mò và hứng thú. Hệ hoàn toàn cơ khí và có thể tùy biến, nghĩa là bạn có thể chỉnh tốc độ, hướng, hoặc kiểu chuyển động theo nhu cầu.
Chức năng
- Di chuyển đồ chơi hoặc ribbon theo đường dẫn hướng bằng pulley, điều khiển bằng remote
- Điều khiển tốc độ và hướng chuyển động của đồ chơi từ xa
- Dễ dàng điều chỉnh hoặc đổi vị trí đồ chơi và các pulley cho phù hợp từng bố cục
Phần cứng và phần mềm sử dụng
Hardware:
Arduino
L298n motor driver
25mm Geared Motor High Torque (kích thước và thông số motor chi tiết trong file pdf)
Infrared IR Wireless Remote Control Module
Power Supply (8x1.5v battery) hoặc (12v adapter)
Jumper wires
2 x 608 Bearings
3 x rubber band
Crochet yarn
Ribbon hoặc đồ chơi nhỏ
Software
Arduino IDE để viết và nạp code lên microcontroller
Fusion 360 để thiết kế
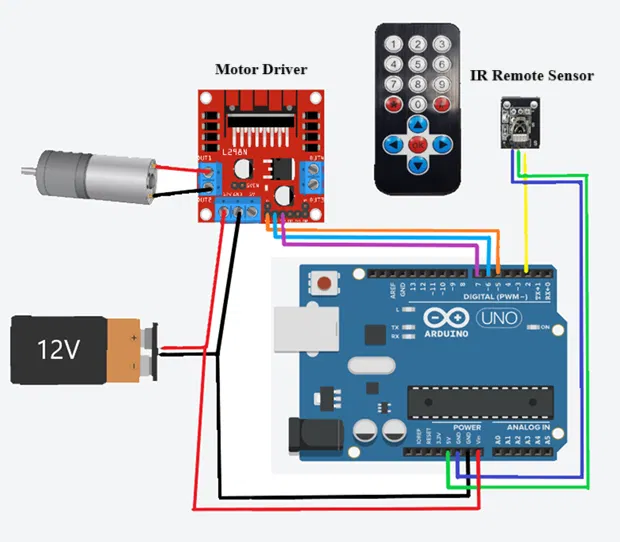
Sơ đồ đấu dây

1- Nối cực dương của pin vào 12v in trên motor driver và cực âm vào Gnd của motor driver. Bạn cũng có thể dùng nguồn 12v.
2- Nối Arduino vin với cực dương của pin và Arduino Gnd với cực âm của pin.
3- Nối motor vào out1 và out2.
4- Nối chân âm (negative) của IR sensor vào Arduino Gnd, chân dương (positive) vào 5v trên Arduino, và chân S vào pin 2 trên Arduino.
5- Nối chân thứ nhất trên motor driver với pin 5, chân thứ hai với pin 6, và chân thứ ba với pin 7.
Code
Arduino Code nằm trong các file đính kèm. Bạn có thể chỉnh các giá trị như motor speed. Motor bắt đầu ở speed 0 và tăng thêm 10 cho tới 255. Bạn cần tải “IRremote” từ Arduino IDE Library Manager. Sau đó chạy code đi kèm; nếu bạn dùng đúng loại remote giống mình, bạn sẽ khởi động motor bằng nút số 1 và dừng bằng nút số 2. Đảo chiều bằng nút số 3, tăng tốc bằng nút lên (up) và giảm tốc bằng nút xuống (down). Nếu remote của bạn khác, bạn cần mở Serial Monitor để xem giá trị nhận được cho từng nút, rồi thay các giá trị đó bằng những giá trị mình dùng trong code. Giải thích chi tiết hơn có trong file pdf.
Hướng dẫn in (Printing Instructions)
- Bạn có thể dùng bất kỳ vật liệu nào
- 0.2 Layer Height
- Có thể dùng infill thấp cỡ 5% cho hầu hết các part, trừ “base cover” và “pulley part” vì cần chắc hơn nên dùng 15% infill cho hai part này.
- Bật support chỉ cho các part “motor base” và “base cover”
Hướng dẫn lắp ráp (Assembly Instructions)
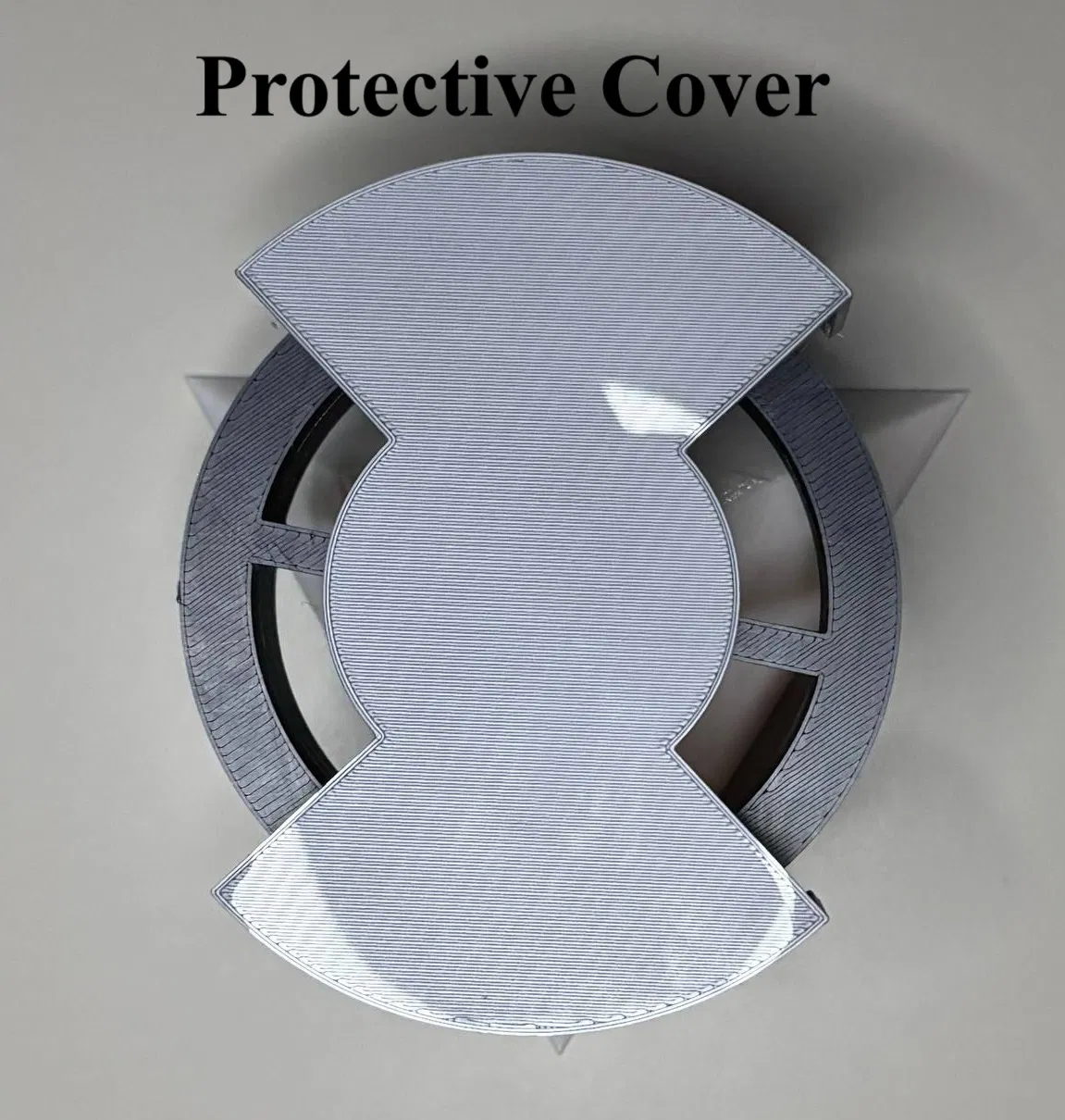
1. In mỗi file 1 lần, riêng các part “base”, “base cover”, “Protective cover”, và “pulley” thì in 2 lần.
2. Nạp code vào Arduino bằng Arduino IDE.
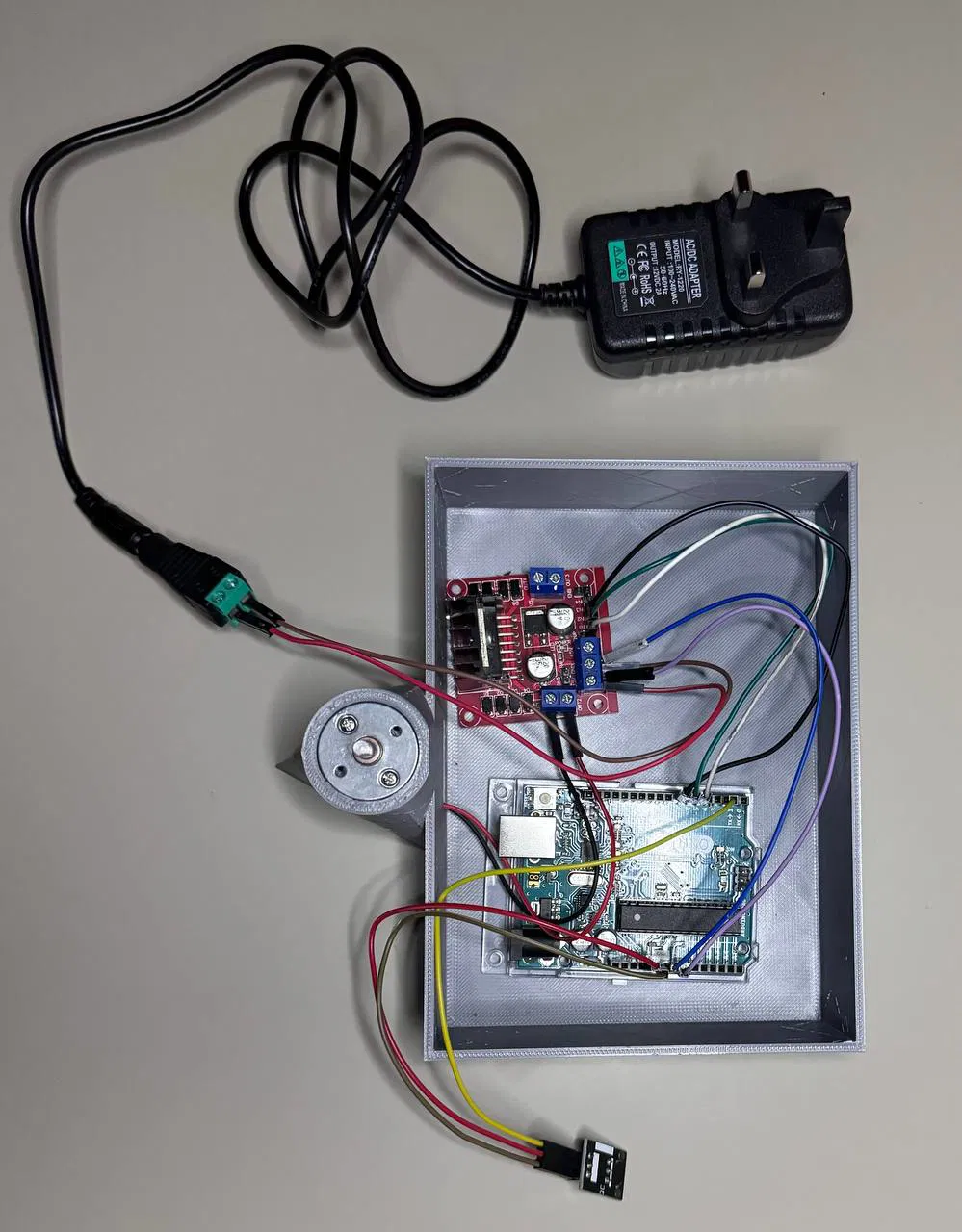
3. Kết nối Arduino và các linh kiện khác theo sơ đồ đấu dây. Đặt toàn bộ phần điện tử vào part “motor base” và che lại bằng part “motor base cover”. Nhớ để IR sensor ở phía trên để nhận tín hiệu từ remote.
4. Part “base” là rỗng; mục đích là để bạn nhét vào vật nặng bất kỳ bạn có như bu lông, ốc vít hoặc Gibson với nước. Việc này giúp phần đế đứng vững.
5. Sau khi nhét đầy part “base”, đậy bằng part “base cover” và dán keo siêu dính để ổn định hơn. Đặt bearing lên trên, rồi đặt “pulley part” lên trên bearing. Bạn cũng có thể dùng keo siêu dính để chắc chắn hơn.
6. Đặt part “protective cover” lên trên pulley, nhưng nhớ canh sao cho nó không chặn biên độ chuyển động của sợi yarn. Dán keo siêu dính để nó không bị xê dịch. Phần này không có trong ảnh vì mình mới thiết kế gần đây.
7. Gắn motor lên “motor base”. Luồn dây motor qua khe mình chừa sẵn đi xuống. Sau đó đặt part “motor pulley” lên trên motor. Có thêm một part bảo vệ cho “motor pulley” tên là “motor protective cover”. Phần này sẽ đặt lên trên “motor base cover” và nhớ dán keo siêu dính để khỏi rớt.
8. Cuối cùng, quấn rubber band quanh mỗi trong 3 bánh xe để tăng độ bám với yarn. Quấn yarn chạy vòng qua các pulley và gắn một món đồ chơi hoặc ribbon vào.
Demo và hướng dẫn sử dụng
Cách dùng đơn giản với IR remote controller. Bấm số 1 để chạy motor, bấm nút lên (up) để tăng tốc và nút xuống (down) để giảm tốc. Nút số 2 để dừng motor và nút số 3 để đảo chiều. Nếu chiều cao ban đầu của pulley chưa hợp ý, bạn có thể kê sách bên dưới để nâng lên. Chi tiết thêm có trong file pdf.
Giấy phép

File mô hình








Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!