Đồ chơi laser cho mèo & chó

Tạo một món đồ chơi laser tương tác cho thú cưng của bạn với dự án này! Sử dụng Arduino, servo SG90 và cơ cấu pan-and-tilt in 3D để tạo ra chuyển động laser hấp dẫn, giữ cho chó và mèo của bạn luôn vui vẻ.











Mô tả
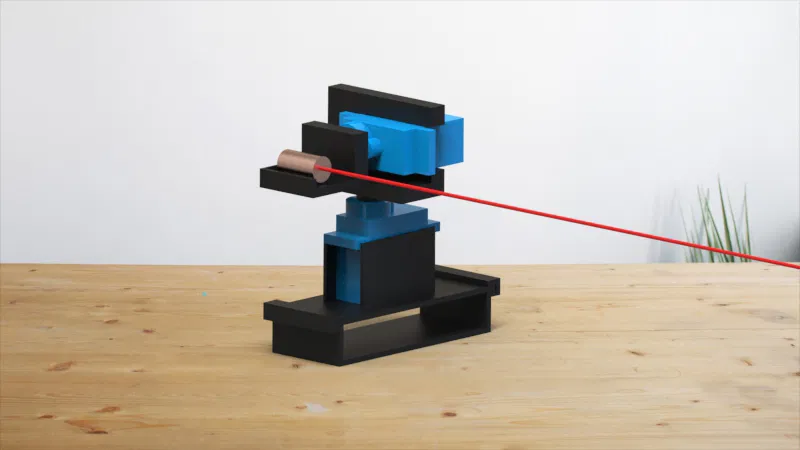
Dự án này là một món đồ chơi laser tự động được thiết kế để giải trí cho thú cưng, sử dụng hệ thống pan-and-tilt điều khiển bằng Arduino. Nó sử dụng các servo SG90 để di chuyển con trỏ laser theo các mẫu chuyển động mượt mà, được xác định trước, tạo ra trải nghiệm hấp dẫn và tương tác cho thú cưng. Các servo được gắn trên một cơ cấu pan-and-tilt in 3D, cho phép điều khiển chính xác chuyển động của laser.
Hệ thống tuân theo một tập hợp các tọa độ được lập trình, chuyển đổi mượt mà giữa các vị trí bằng cách sử dụng các góc servo được ánh xạ. Laser vẫn hoạt động trong khi các servo di chuyển theo các bước tăng dần để mô phỏng chuyển động không thể đoán trước, giữ cho thú cưng hứng thú.
Vật liệu cần thiết:
-
Vi điều khiển Arduino (Hoạt động tốt với UNO và NANO - chỉ cần lưu ý rằng các servo phải được kết nối với các chân PMW)
-
Bảng mạch mẫu (Protoboard)
-
Servo micro SG90 (X2 cái)
-
Mô-đun Laser KY-008 (Laser tương thích với Arduino)
-
Dây nối (Jumper wires)
LƯU Ý QUAN TRỌNG:
Trước khi lắp ráp, hãy chạy mã “CALIBRATION” với cả hai servo được kết nối với arduino. Công việc của mã này là đặt từng servo vào vị trí chính xác để khi bạn lắp đặt hệ thống pan and tilt, mọi thứ sẽ hoạt động như mong đợi.
Hướng dẫn lắp ráp:
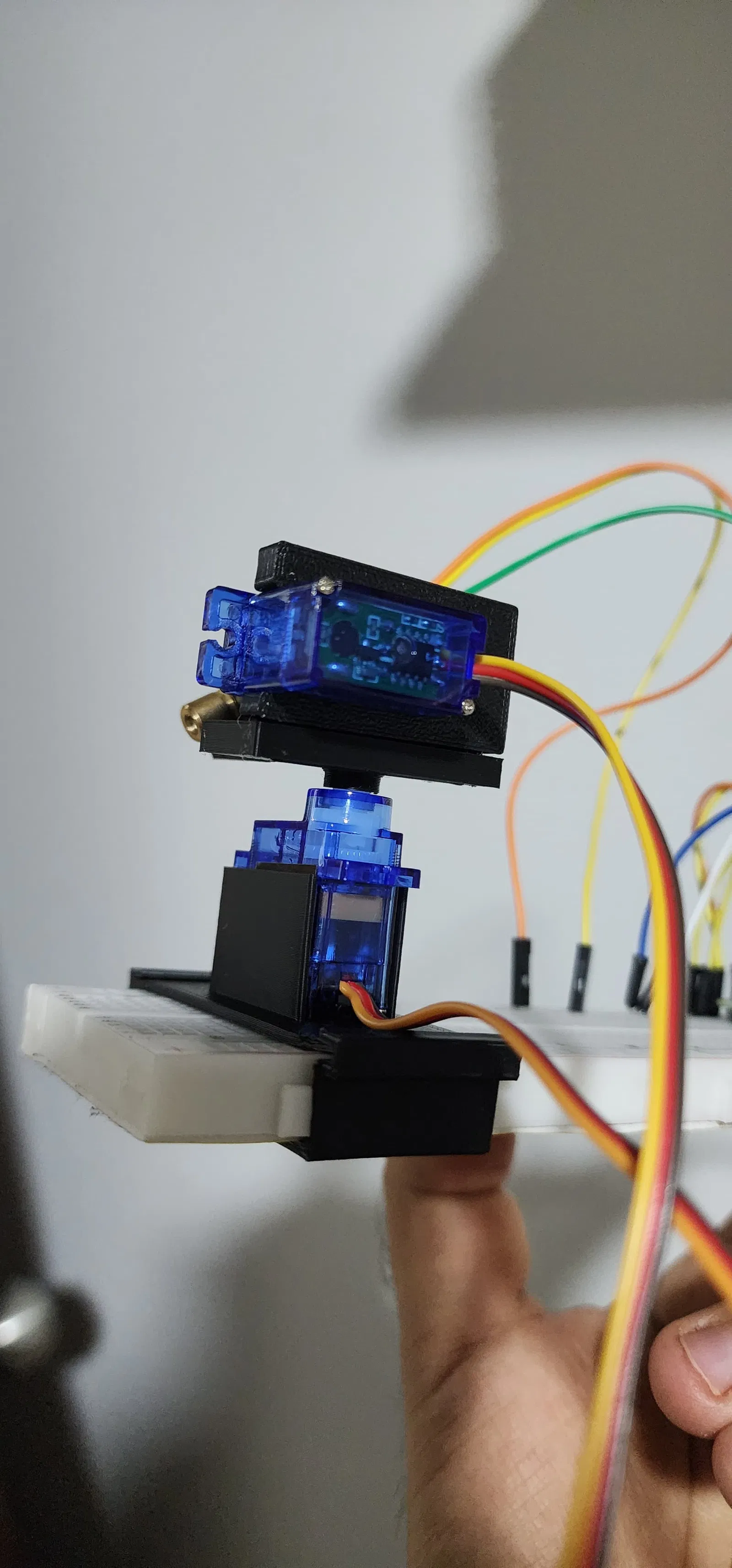
Mô hình 3D được thiết kế để phù hợp với một bảng mạch mẫu thương mại.
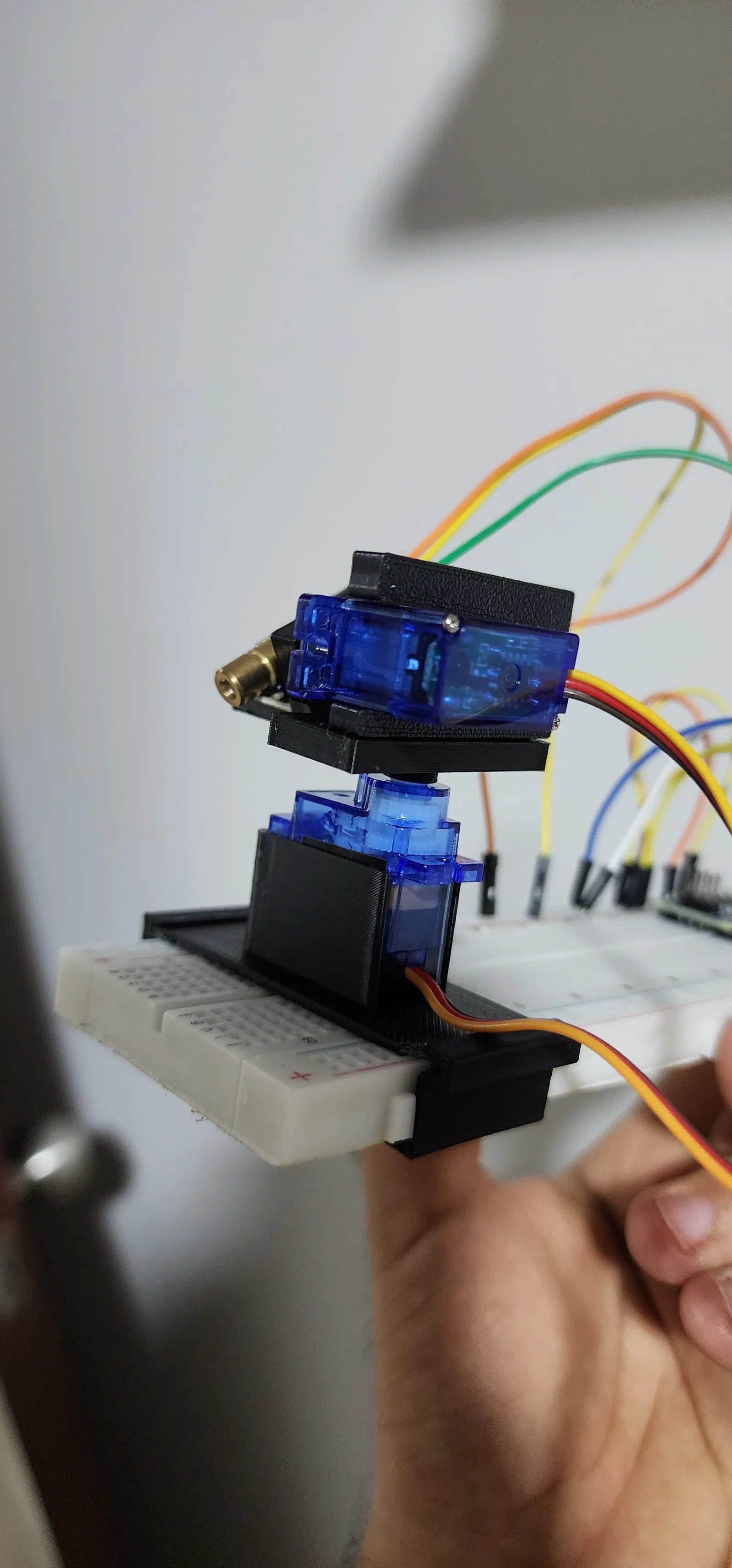
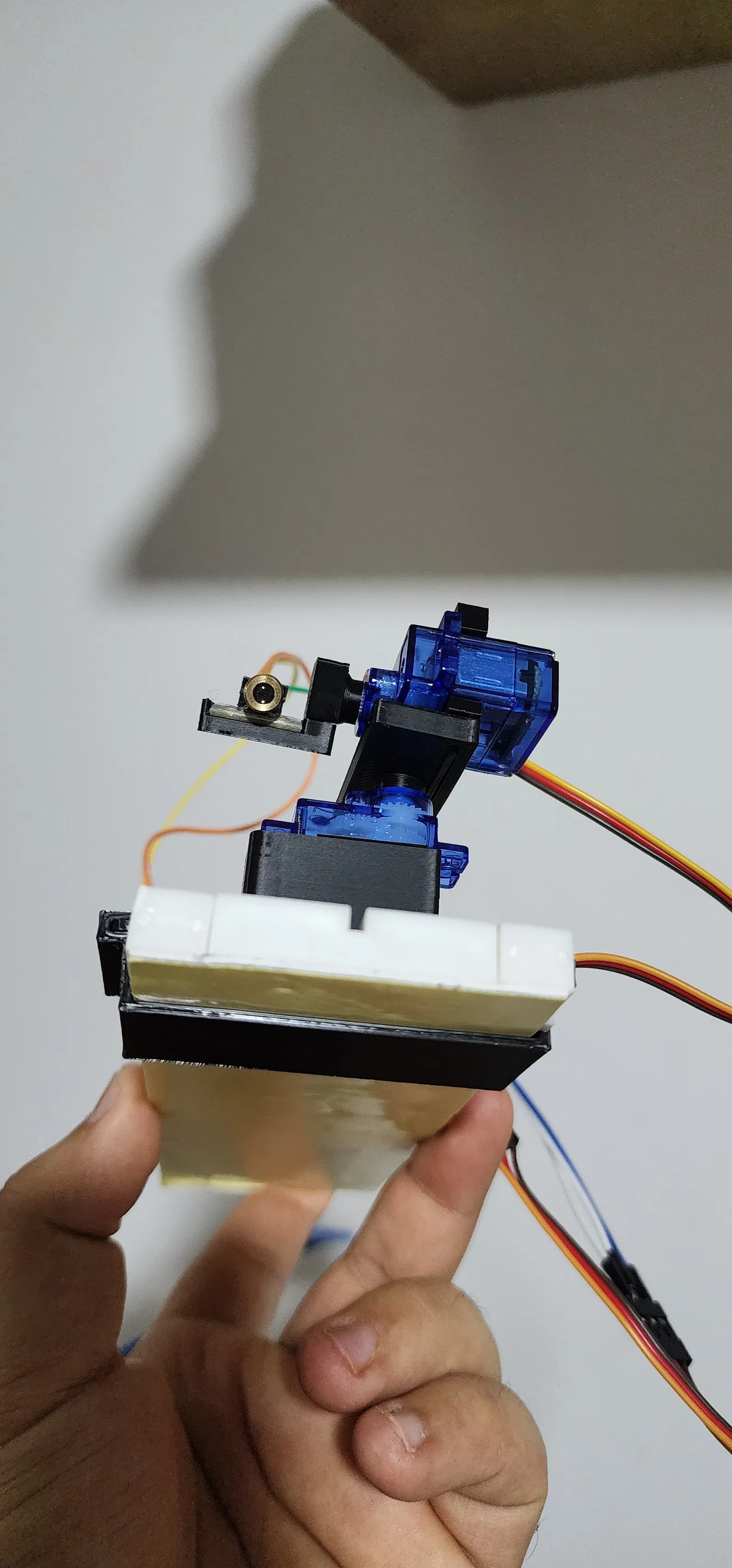
Một trong các servo chịu trách nhiệm chuyển động ngang - đây là servo gắn vào đế của bảng mạch mẫu.
Servo còn lại chịu trách nhiệm chuyển động dọc - đây là servo gắn vào phần trên của bộ lắp ráp.
Lắp ráp “Giá đỡ hộp Breadboard”:

Khi lắp ráp xong, cắm servo đầu tiên vào đế:

Lắp ráp “PAN & TILT Trục X”:



Khi lắp ráp xong, cắm cái này vào bánh răng của servo đã được lắp trên đế.

Lắp ráp “PAN & TILT Trục Y”:



Sau đó, cắm cái này vào servo còn lại:

Và sau đó, cắm servo này vào bộ phận đã lắp ráp trước đó:

Cuối cùng, cắm mô-đun laser vào vị trí phù hợp:

Về mã code:
Hãy nhớ chạy mã “CALIBRATION” trước để đảm bảo các servo ở đúng vị trí trước khi thực thi mã thực tế di chuyển các servo.
Sao chép mã từ tệp CODE.txt và tải nó lên Arduino. Theo mặc định, các servo sẽ vẽ một số hình tròn và mẫu trên sàn để thú cưng có thể đuổi theo tia laser. Tuy nhiên, bạn có thể thay đổi hình dạng mà mã tạo ra bằng cách yêu cầu công cụ AI bên dưới và thay thế các tọa độ giữa các dòng #39 và #52:
_**Trên lưới từ -100 đến 100 theo trục X và Y, hãy cho tôi tọa độ cho
(chèn hình dạng bạn muốn tạo)**_
Theo định dạng này:
{X1, Y1}, {X2, Y2}, {X3, Y3}...{Xn, Yn}
Thông tin đấu dây:
Servo 1 (Trục X):

Servo 2 (Trục Y):

Laser:

Sơ đồ:


Giấy phép

File mô hình





Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!