Đế truyền động "Kiwi Bot" XRP đa hướng

Cải tiến đế robot XRP, cho phép di chuyển đa hướng bằng ba bánh xe omni. Tương thích hoàn toàn với hệ sinh thái XRP, giúp sinh viên học lập trình điều khiển nâng cao dễ dàng hơn.




Mô tả
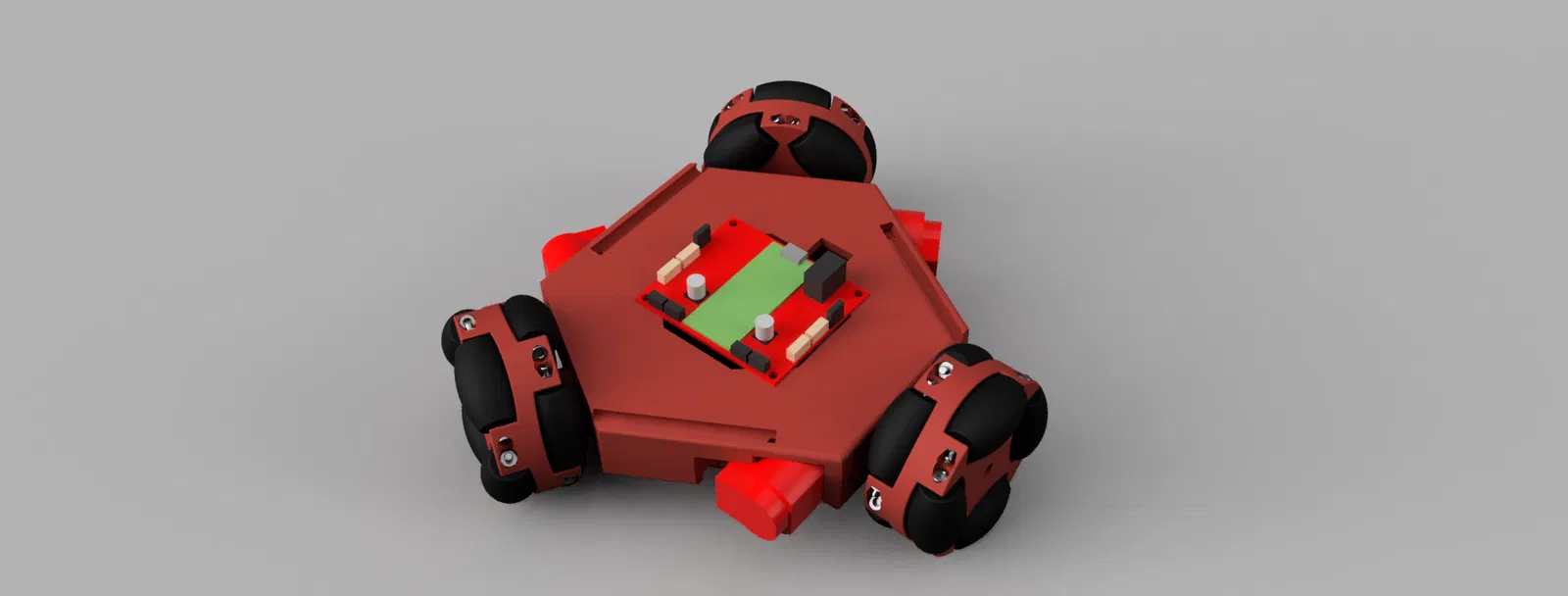
Con robot này là một cải tiến cho đế robot XRP hiện có. Robot sử dụng ba bánh xe omni để cho phép robot di chuyển theo bất kỳ hướng nào cùng một lúc.
Bằng cách cho phép chuyển động holonomic với đế truyền động này, sinh viên học lập trình có nhiều cơ hội hơn để tìm hiểu về điều khiển nâng cao.
Để cho phép tương thích với hệ sinh thái robot XRP, robot này có kỹ thuật lắp ráp tương tự cho các cảm biến và cơ cấu có thể gắn khác ở mỗi bên của robot. Nó cũng sử dụng cùng động cơ, pin và hệ thống điều khiển được tìm thấy trong robot XRP.
Phần cứng
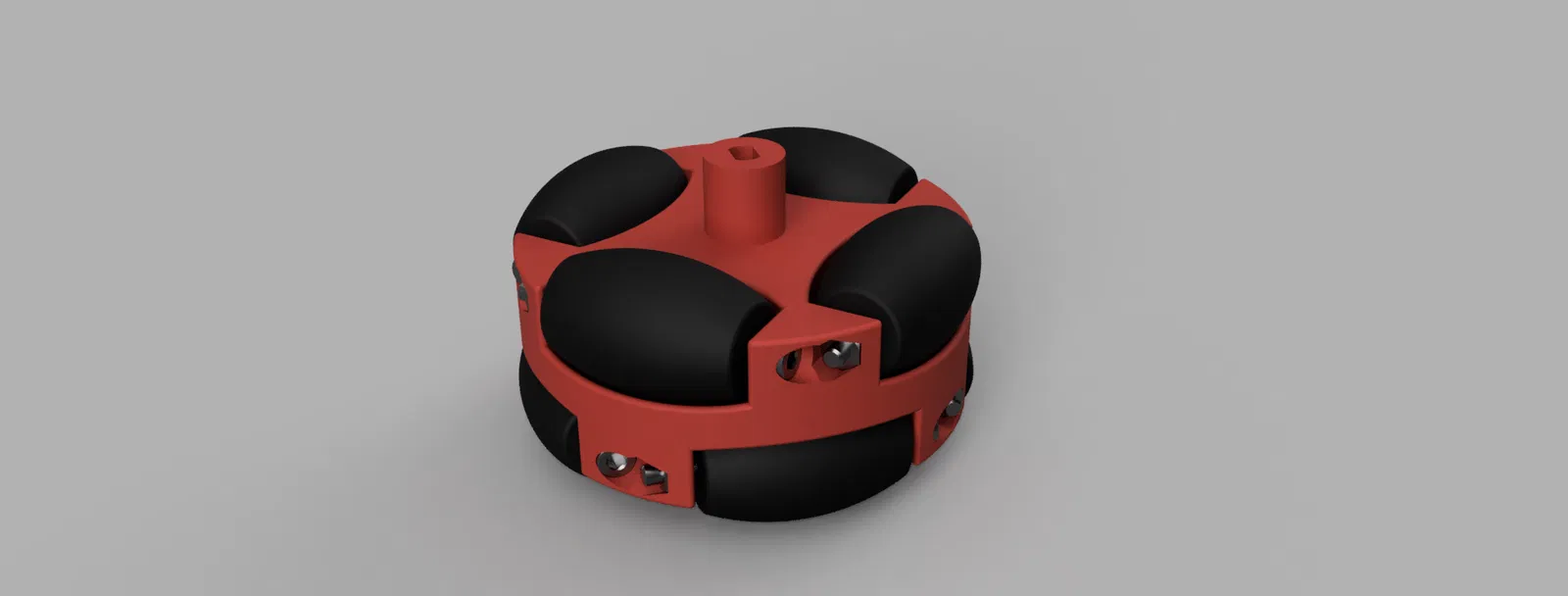
Các bánh xe omni được lắp ráp với tám vít M3 dài 40mm và tám con lăn được in. Robot chứa phần lớn phần cứng giống như trong bộ dụng cụ robot XRP. Để điều khiển từng bánh xe, robot sử dụng động cơ có bộ mã hóa tích hợp.
Cài đặt in
Khung gầm và nắp pin có thể được in mà không cần hỗ trợ, nhưng vỏ bánh xe omni cần hỗ trợ. Tôi khuyên bạn nên in bằng PLA hoặc PETG với mật độ lấp đầy 20%.
Giấy phép

File mô hình




Chưa có bản in nào được khoe. Hãy là người đầu tiên!

Chưa có bình luận nào. Hãy là người đầu tiên!